I changed props to 16" direct mount and was doing basic flight tests. Loiter works, throttle works, pitch and roll also work as expected, but yaw results in loss of control and crash.
What would be a safe way to try to diagnose and correct this (mis)behaviour? I do not have a large open space anywhere nearby. Hills, forest, sea, is what I have and using trees or nearby houses to stop an out of control drone is scary.
I unfortunately don’t have anything to analyze logs on this computer, but my guess would be lack of power. Yaw needs a bit of headroom… So if the motors are giving everything they have to keep it flying, yawing would cause problems.
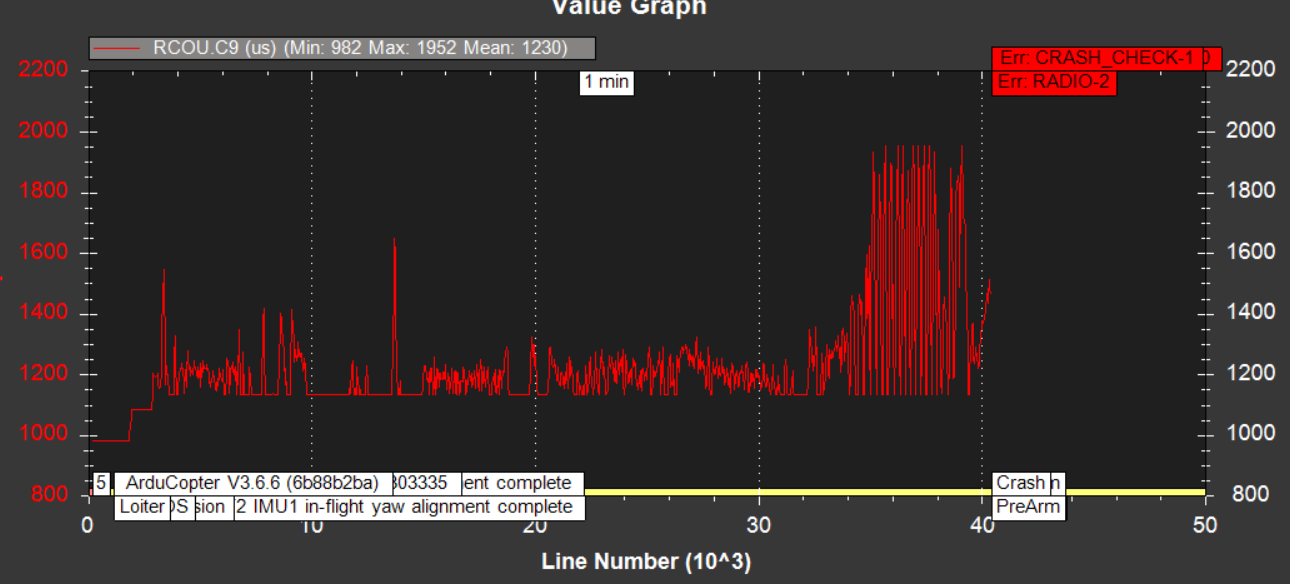
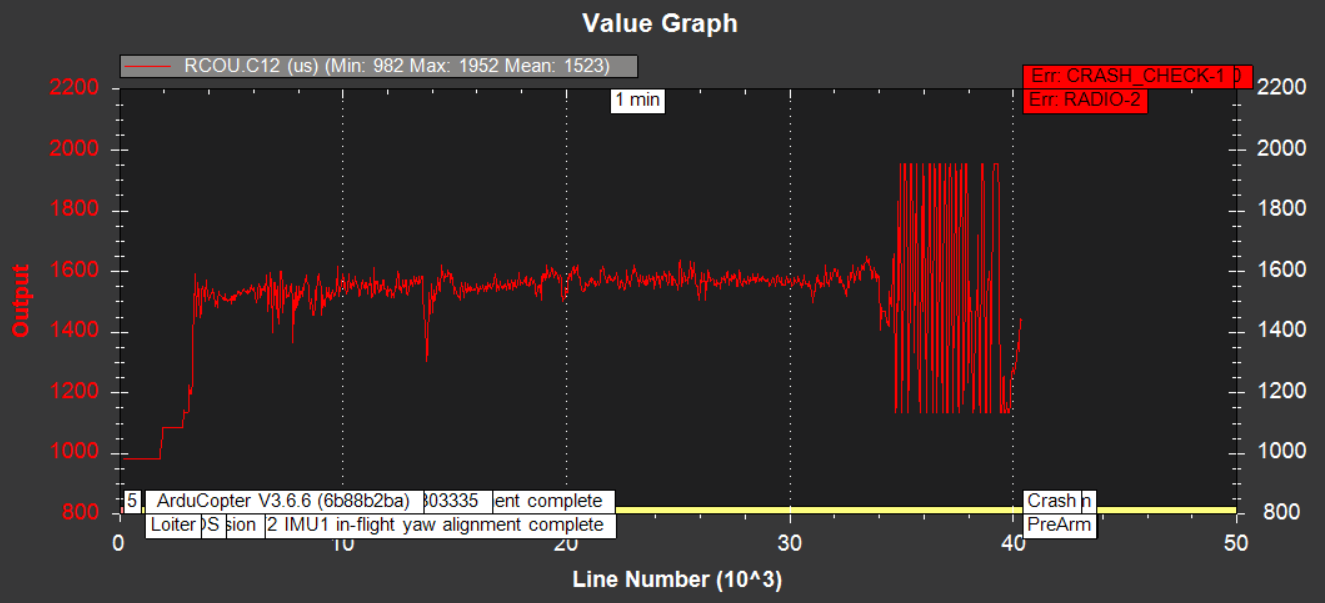
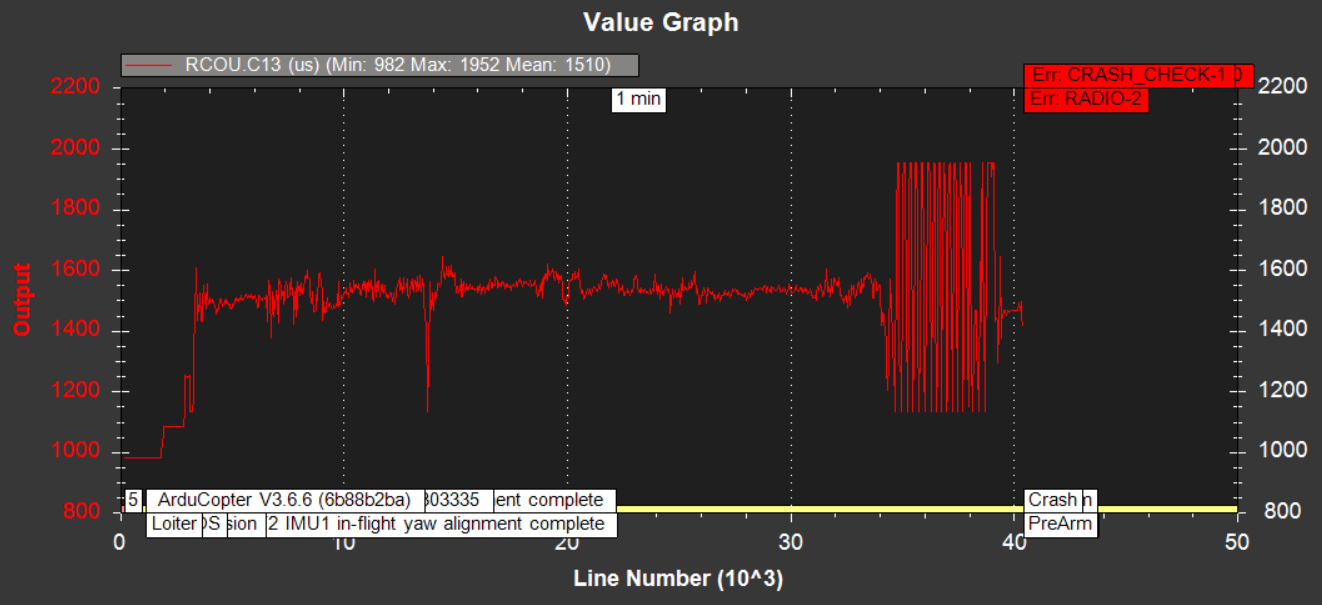
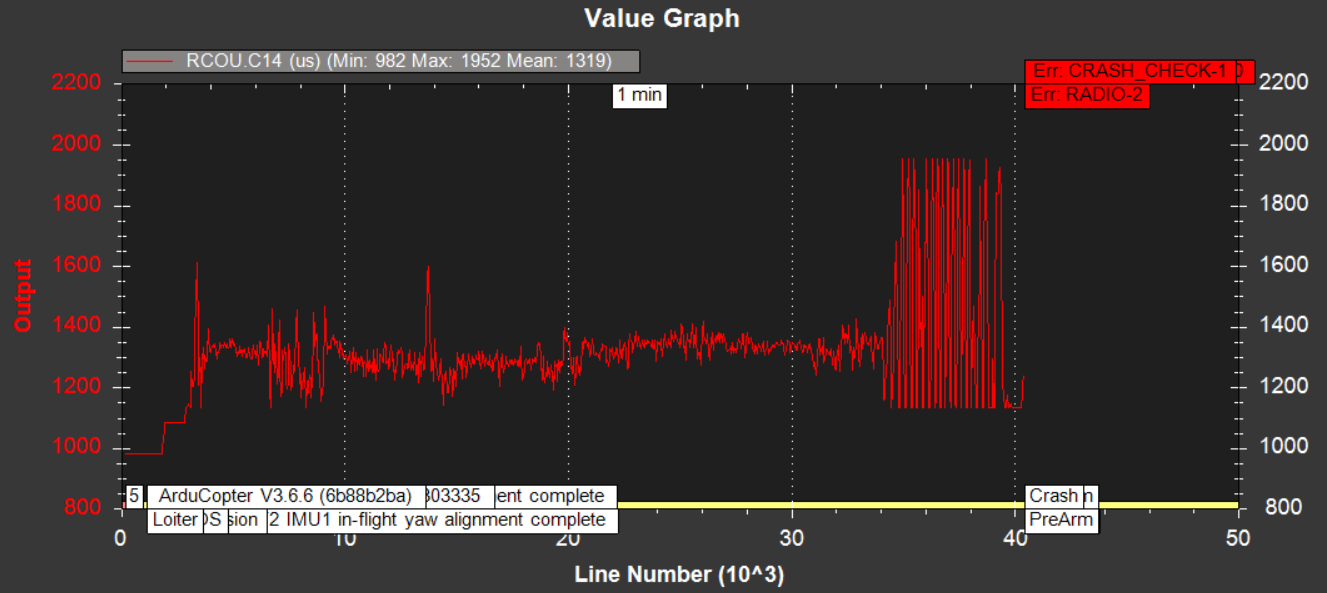
Graph your rcout channels for your motors to see if any are hitting their minimum or maximum.
And, what motors do you have and what props did you have before? I could also imagine motors being over propped could cause an issue, as the motors couldn’t react fast enough to keep it under control.
Well, I’m still just guessing, but it’s not lack of power. However, your c9 motor is hitting its minimum. Maybe that is causing the problem.
If this is a hexacopter (not a y6), then try adjusting your center of gravity and see if it helps.
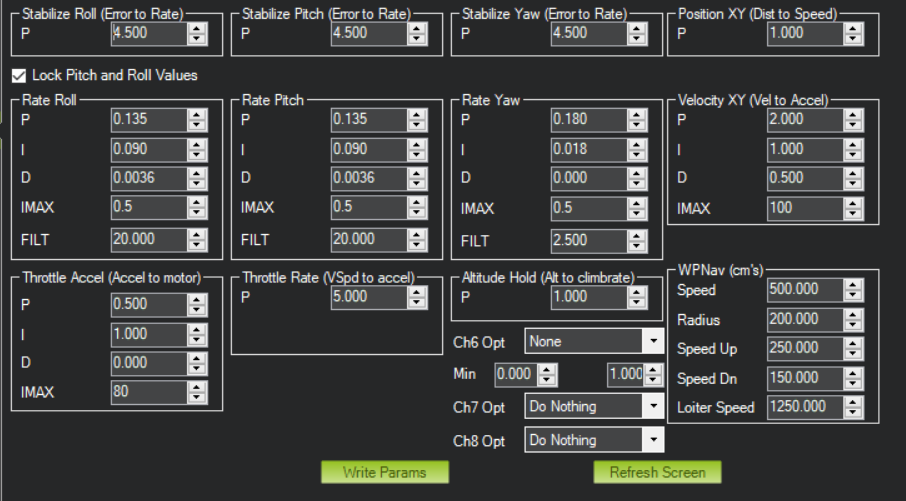
My next guess would be maybe lower your yaw PID’s, but I don’t really know…
Hopefully someone can review your log and give you a more informed suggestion.
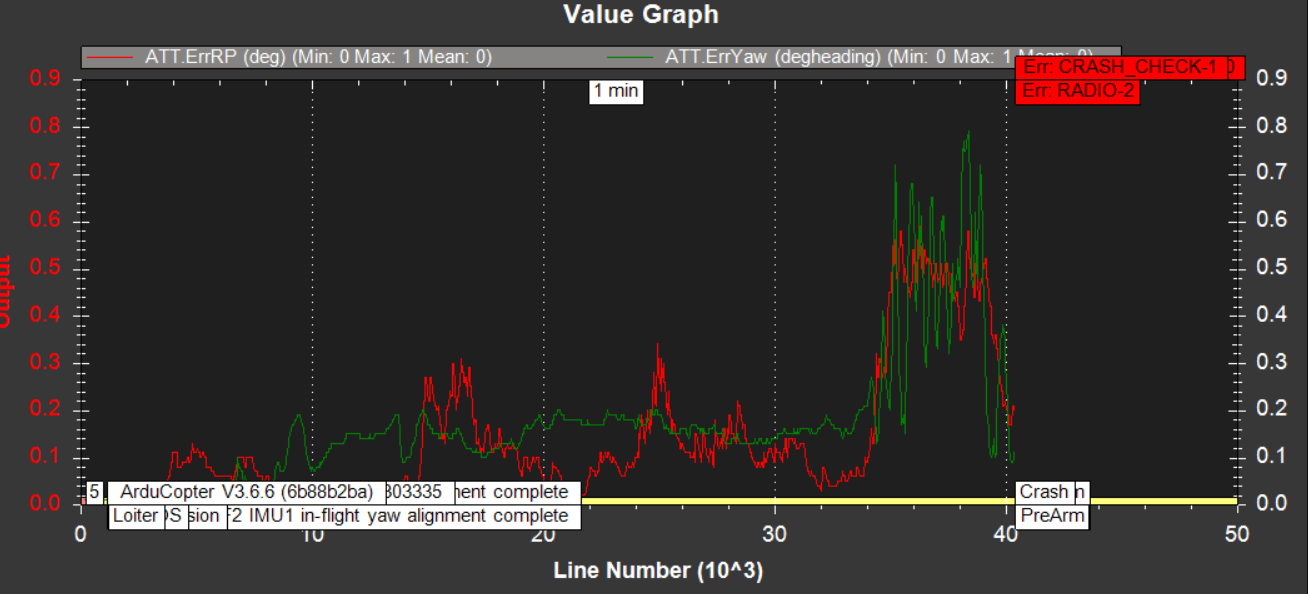
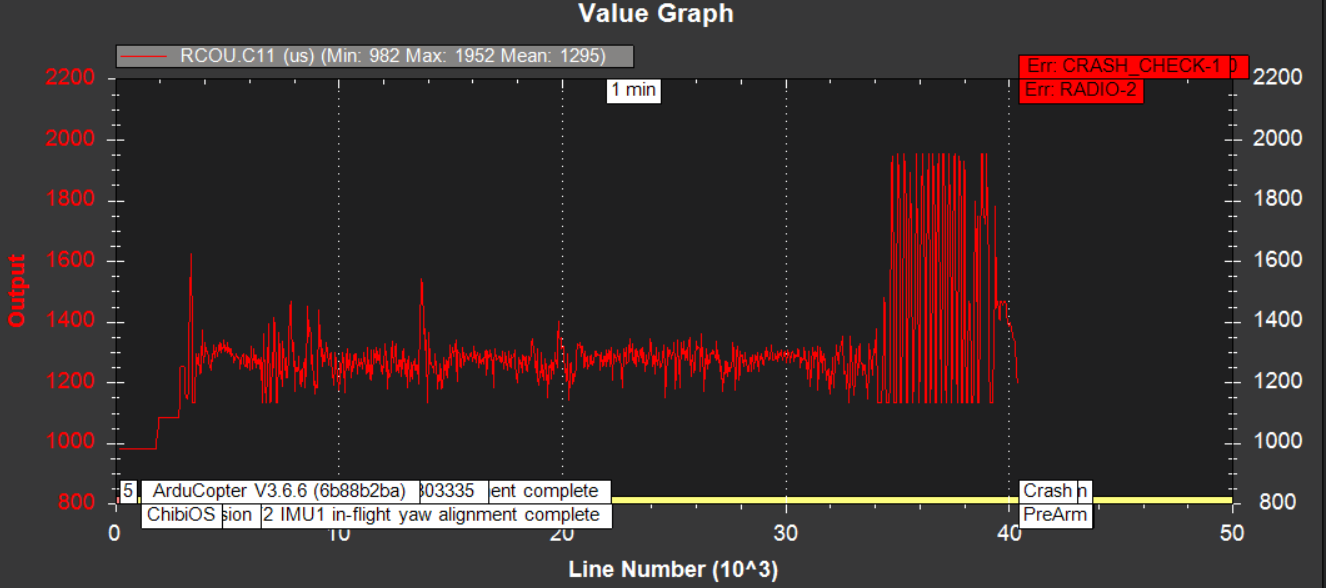
Yea, the c9, c11 and c14 rcout plots are a bit odd in fact. I need to look into this and understand it. What happens when the drone is airborne is scary so I do not intend to repeat the flight tests without having some idea about what is happening and what to change. You can see the FC goes mental and applies full power followed by full cut in a rapid cycle in the attempt to correct whatever seems to be bothering it.
It is a hexacopter in X configuration. I test the cg front and back and it is pretty much perfect, but did not do it left/right as I assumed it has to be balanced as the motor and mini gimbal are along the main axis.
@mboland
This reminds me; at what prop size do you recommend going for even lower filter settings, ?
Is your experience with things like 32" props on X8 frame that even if 10hz feels ok for pitch and roll, use needs 5hz or lower ?
The rule of thumb described in that link seems to stop at about 28" props. I’d love to hear your experience with bigger, and X8 related configurations.
I don’t have personal experience of props over 28" but I have read someones post who was lowering the values to 8 on a very large X8 with large props to good effect.
I maidened a 24" quad two weeks ago. On 12S, 135 kV motors.
With filters at 10 Hz, first autotune took 12 minutes, saved the params, then a 2nd autotune finished in 6 minutes.
The thing flies very well, is agile, consumption aside it wasn’t bothered by 60 Kmph winds.
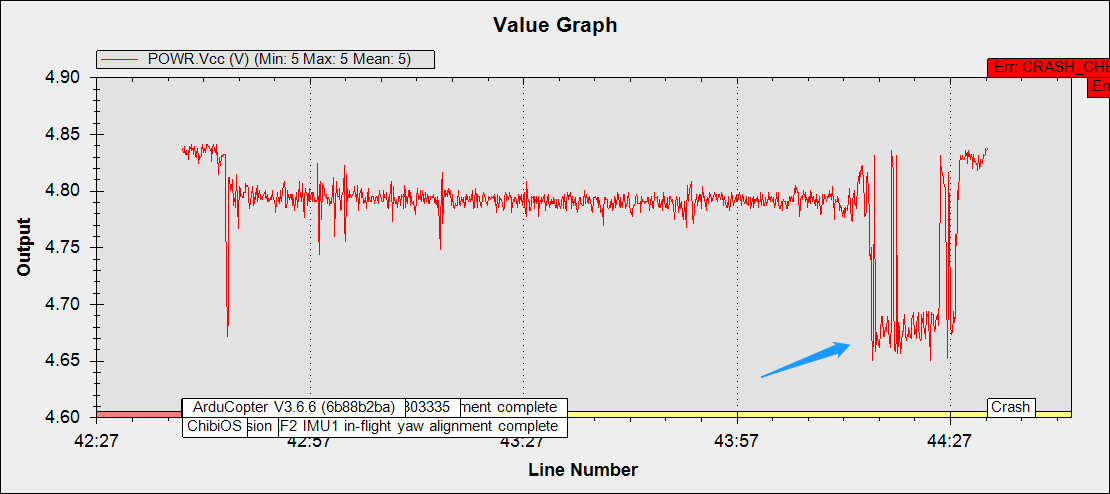
There is a problem with your power supply system. The voltage of the flight control board drops very badly when the attitude changes. The flight control will automatically restart after falling below 4.6V.
Thank you all for the suggestions thus far. I traveled away from my drone so I will be unable to test the remedies.
I changed the filter settings to 10 Hz but did not get a chance to do a test flight
I ordered a new power module - Holybro original this time which will hopefully do a better job when motors are at their max throttle
I am very anxious about the test flight, and even more so about autotune. As mentioned I do not have a large clear field anywhere near me. The closest such feature is already occupied by an airfield which is contraindicated. I may need to try to book flight time with them and get some clear airspace if all else fails.
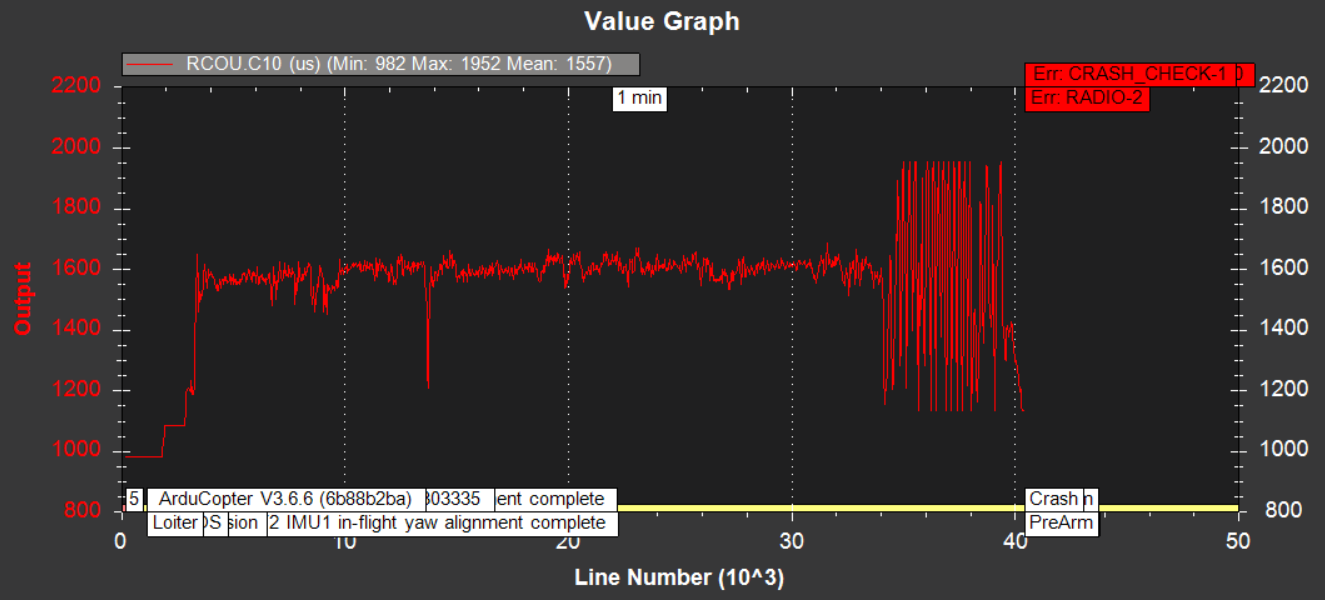
Motors 1,3,5 are lower than 2,4,6. That means that the copter when hovering is trying to yaw to compensate probably motor/propeller tilt. Then, when you command yaw, the copter is unable to go further.
I was browsing through the forums in attempt to find a solution to my problem, ant found this thread.
I have a H4 with 15in props, and it was falling down every single time. Someone suggested to do better vibration isolation for the controller, so I did that and autotune with aggressiveness set to 0.05 went well till it started yaw tuning. Then it just started oscillating and bowled around and went down.
I noticed that P for pitch and roll can be set quite low, I have them at 0.07 after autotuning. Yaw P though can’t be below 0.1, which makes me think that maybe that is a bit too high for my frame? Could it be the same for yours?
Video was shot in one hand while I was looking at the drone. Sorry for the drift.
The only change to the settings that I made was to the filters which are now 10 Hz.
My observations:
Drone is super twitchy - hyper responsive to even the tiniest inputs. Literally a milimetre of stick movement.
Drone overshoots the amount of roll and pitch and overcompensates, causing it to bounce along the respective axes until it stops
The whining noise is scary. What is it?
The ratcheting noise like a propeller hitting something was not audible to me, but it is heard on the video. What can it be?
So, how so I slow down the reactions of the drone? How it behaves right now scares me too much to attempt autotune, as I think it would result in an autocrash due to controller losing control during its twitching sequence.
EDIT: propellers are bullnose and I read that this may cause problems/affect the PIDs
I edited PIDs manually. Dropped the P, left the I alone and increased D. Now it flies very well. Still overshoots, but there is zero oscillation and I am not longer terrified.
Regarding that rattling sound, it could have been caused by propeller mounting bolts being a tad too long and the bearings a tad too lose causing the bolt to make contact with the stator. I changed the bolts out for shorter torx head bolts.