Hi all, this is quadcopter, about 20 seconds in you’ll see the mode change and the oscillation start, any ideas?
Yes, follow exactly, step-by-step, https://ardupilot.org/copter/docs/tuning-process-instructions.html
After that do https://ardupilot.org/copter/docs/common-imu-notch-filtering.html
And finally: https://ardupilot.org/copter/docs/autotune.html
Then post the new log file and video.
Do not running more time , will fail your battery in mid air also serious problem with motor.
given by @xfacta 
Happy flying 
very nice, however if flies fine in stabilize mode, how can that be?
also, how do i make a log file?
thanks for the help 
Google “arducopter log file”
Yes, curiously I did that and it did not really help me. I put and SD card in the Pixhawk, found the log file, now I’m struggling to view the data on it
also - why is this only happening in auto flight modes?
stabilized flight is fine, this implies it’s none of the stuff you sent me
Maybe you loose barometer cloth (like a soft tissue material)
Hmm , there is 2 ways to findout
1 = Downloading and Analyzing Data Logs in Mission Planner — Copter documentation
2 = Mobile Application Log Viewer For Ardupilot given by @hosein_gh , he is very good person ![]()
Happy flying ![]()
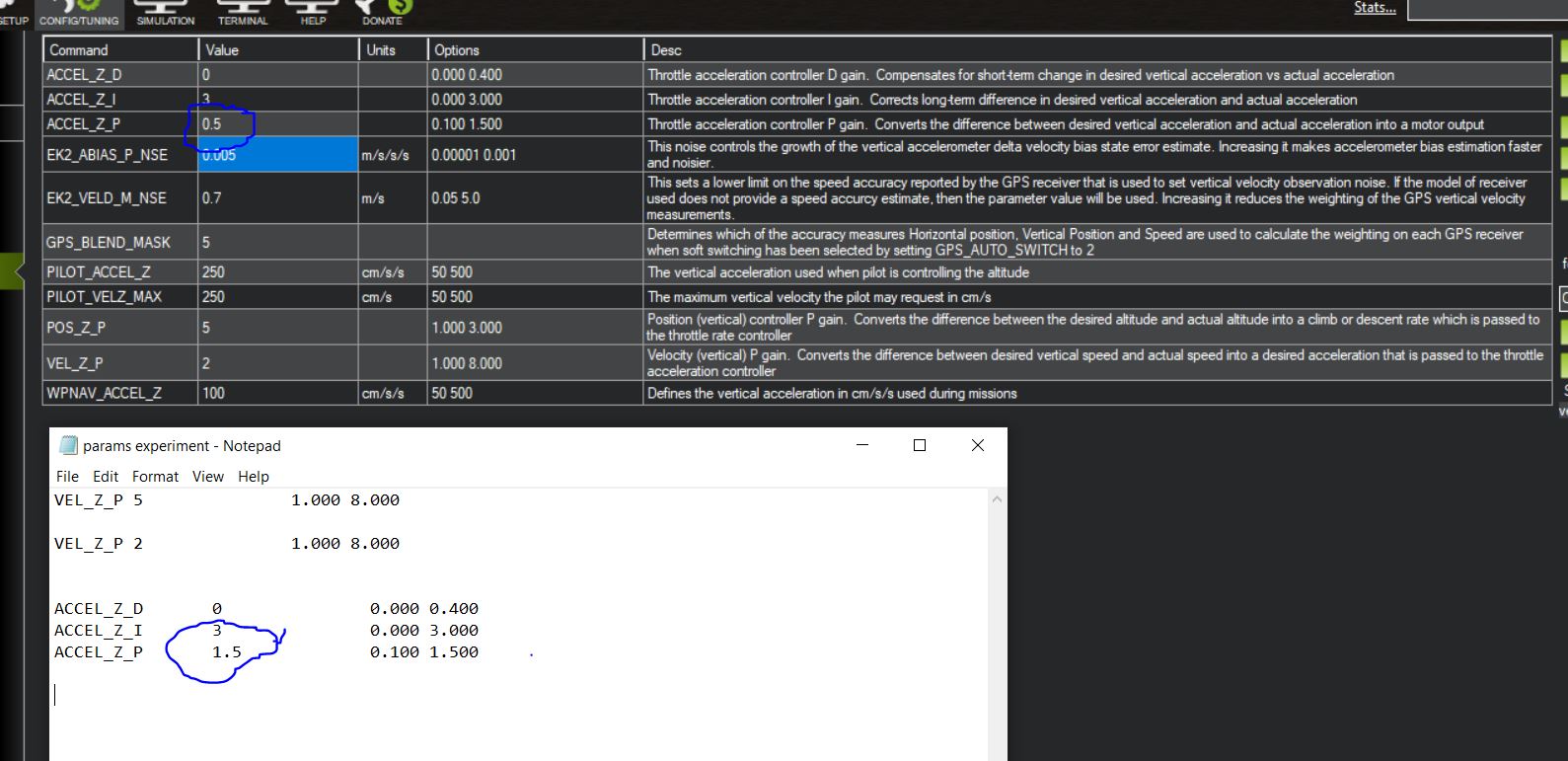
this issue is linked directly to the vertical position hold, it’s got to be like one or two parameters, ideas?
it’s only occurs when arudpilot is holding the hight automatically
The stuff I told you to do is very, very important. If you do it properly you will find that your vehicle will operate a lot better in loiter mode and all other modes.
yeah i’m doing it, i’m working through it, weather bad right now
now it works ok!
Now it is flying, but I would suggest still some worlk in the frame.
Arms should be much more stiff. 3D printed drones need an specific design to increase stiffness / reduce weight.
Happy flying
yeah i plan to use carbon tubes and 3d printed combined in the future but point noted
that’s my first attempt ever by the way