I’m having a bit of trouble trying to diagnose a problem that I am having with my hexacopter.
One of the propellers is making an interesting noise and quite a bit of oscillation is occurring while in flight.
Later I’m going to test each motor at a higher throttle to see if it will do the same on the bench.
Just wondering if anyone could make out what the problem is from this video or the datalogs:
Vibrations are higher than desired, but not the worst. It would be worth looking into what’s going on there. Higher Y levels so check that your props are centered or one of the of the blades isn’t damaged.
The tune is still not complete, so that will cause a lot of the oscillations. Get the vibration sorted out first then set the notch filter and then go on with the tuning.
Check out the Methodic Configurator if you’re not familiar with the tuning and filter setups.
Yea, I thought that it could be one of the blades initially, replaced one that I found minor damage to on the tip. The video was recorded after it was replaced.
I will double check to make sure that all the blades are centered, and I’ve never done any tuning myself, generally machines that I build tend to work decently upon completion of the basic hardware mandatory procedures.
Do you think that this could be a tuning issue mainly, or more of a physical issue?
Super-unsteady! That’s strange behaviour, usually there is some rhythmic oscillation but you have seemly random disturbances.
Disconnect your gimbal and fix it in place if you have a stabilised gimbal fitted.
Go back to MissionPlanner motor test - check and recheck the motor order and spin direction, Hex’s are a bit odd with the layout if you are used to dealing with quads.
Check the quality of the motor to ESC connections, although there’s nothing special in the RC Out logging.
Check the props are tight on the motor shafts - what motors, props and ESCs are they?
Set these for a start, but they are unrelated to the actual issue, just good for diagnostics and safety.
Get a bubble level of some sort and maybe a straight edge, or even just a string line level.
Use it to level the whole copter by packing under the landing gear since whatever surface it’s on is never level and no landing gear is created perfectly. Do not try to just level the flight controller, it’s the “prop disc” that needs to be level (across the tops of all the motors).
When you have it just right, in MissionPlanner / Setup / Mandatory / Accel - press Calibrate level
These will get updated:
It’s advisable to change out those ESCs to something of good quality and reliability.
I strongly recommend a known BLHELI32 or AM32 ESCs to make use of their improved efficiency and reliability and the sweet data they can supply. You can use DSHOT protocol too, and not every worry about ESC calibration or interference again.
You could potentially use a 4in1 plus 2 single ESCs of the same type, or you can even get an 8in1 now.
I’ve had good experiences with the Holybro Tekko ESCs, and others have good reports for the Aikon ESCs.
Ok, I replaced the motor and esc that I was assuming to have issues as well as recalibrated the entire system but to no avail. It also seems as if replacing the motor and esc made a slight improvement compared to before but still super unsteady.
Either the motor or the prop is making a vibrating noise that I can’t seem to diagnose exactly which component is making.
Here’s the video of the latest run that I have done where the noise is apparent:
Can you mount those ESCs inboard to keep the power wires short. It doesnt really matter how long the motor wires are.
Can you upload the .bin log to a filesharing service then supply the link to it here?
I would like to, I had them inside of the arms before but that caused one of them to meltdown, I’ve since then replaced them but the new ones that I got cannot fit inside.
I have a payload wench system on the bottom therefor I cannot put them on the bottom and the top is reserved for the batteries, gps, fc.
The center is mainly taken by the foldable arms and the PDB.
I could flip them around to reduce distance but they would still be about 8 inches long a peice.
If that unsteadiness is linked to one arm, and you’ve already replaced the motor and ESC, then it’s got to be connections or wiring - something like that. You could try moving that ESC connection to another servo output on the flight controller and easily modify the servo outputs to suit - there’s a Servo page to do that.
About the noise that it is producing, could that be something that the motor is making due to the signal (some sort of rapid oscillating signal) that it is given or could that be a physical anomaly?
Coming back to this topic after many months of testing, I identified the fault as an esc. The Esc that I replaced had not been functional.
Although that fixed the large overcorrections, I’m now having smaller issues of oscillations and what I’m assuming to be tuning issues.
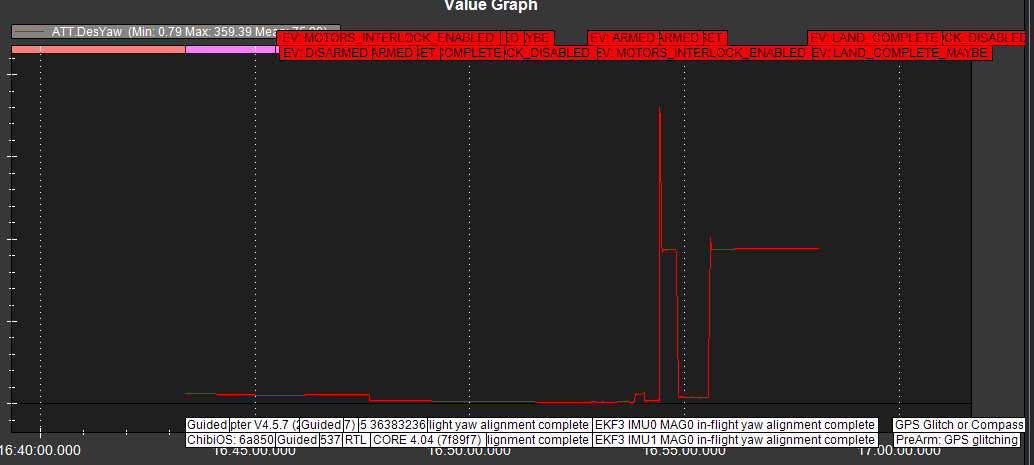
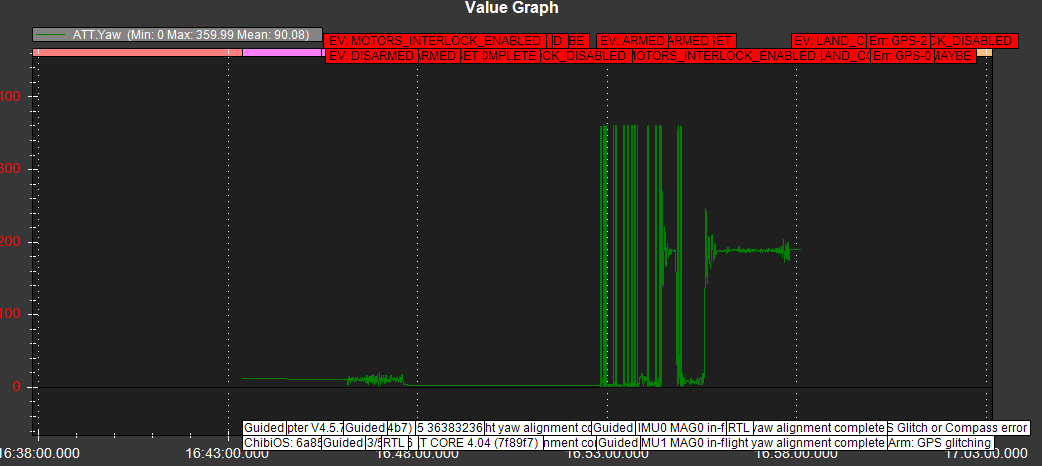
I looked at the logs of my most recent flights and all is well other than desired yaw and yaw do not match.