Hello, I am having an issue with the Orqa 3030 F450. I have ardupilot installed with the latest stable build. I am however getting the following error:
“Critical: Config Error: fix problem then reboot”
“Critical: Config Error: INS: unable to initialise driver”
and this just keeps repeating. From the looks of everything I am not getting Power readings from the ESC which is also made by Orqa and is the 3030 4-in-1 ESC. Curious if any one has run into this issue or a similar issue and might be able to help me out.
Thank you, a bit of an update if it helps
I am just starting to think there is something wrong with the communication between the FC and the ESC. I am trying to use BLHeliSuite32 to flash the latest BLHeli firmware if that is the issue. Due to a guide I found online for Ardupilot Methodical Configurator. The Suite just keeps telling me to check the USB/Serial port, I have SERVO_BLH_AUTO set to 1.
Set LOG_DISARMED,1 and reboot, let it sit for a couple of minutes.
Set LOG_DSARMED,0 and reboot, download the .bin log created.
Upload the .bin log to dropbox or similar and provide the link here.
This gives us all the parameters and will maybe help identify the original problem too.
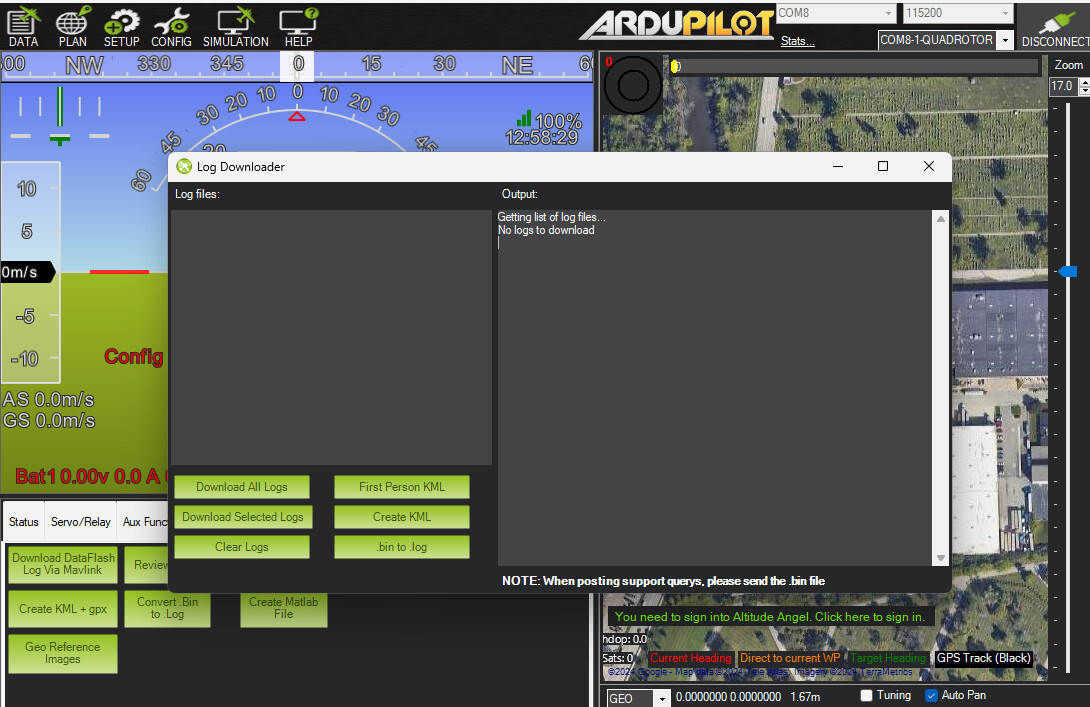
I tried to get the log data off the FC for the past 1hour but It seems like it is not logging. I set the for LOG_DISARMED to 1 and then rebooted the drone. waited a few minutes then changed the setting back to 0 and rebooted the drone but there are no logs in the DataFlash Logs. I am not sure if there is another way to download the logs that you are asking for.
Unsure if this helps but I was able to look online for the IMU and it seems to be an Invensense IMU model Number ICM-42688-P. I found one on AliExpress that pointed me to that model number based on the text at the top of the IMU “I428p”.
I see on the Ardupilot website the IMU supported is the MPU6000 not sure if that is the issues at play here.
Here’s a build with ICM42688 support. The rotation will be wrong, please load it up and if possible send a video of the mission planner HUD as you rotate it in roll, pitch, yaw - or describe how the HUD changes.
Thank you that helped a lot, I can get the video up and going. I tapped the front of the Drone in the video. Then I rolled right, rolled left, Pitch up, then pitch down. Lastly Yaw right then yaw left. My GPS is probably all over the place since the top is not fastened down.
Ah ya forgot about that the arrow points to the front so where I tap the drone in the beginning of the video. In the video the front is pointing to the right from our perspective watching.
Thank you @andyp1per. Looking better the only issue is that the pitch is reversed. From the looks of it. In the video below I show roll fist and roll right and left look correct to me. Then I pitch up then pitch down. Lastly yaw left then right. Both Yaw and Roll look correct just pitch seems to be doing the opposite.
Yes, it is facing towards the camera. I can take a video of it facing away from the camera but the roll looks correct to me give me a second to get another video
This time the front of the FC and the Drone is pointed away from the camera. The Roll looks backwards to me but I could also be completely wrong. Everything else looks correct for pitch and yaw and the IMU orientation with the FC.