Roll is correct in the video - looks good!
Oh ya it was thank you for catching that. I think i am all set I was able to map the motors so I think my only issue was the IMU thank you for all your help.
2 Likes
Hi Aaron, great to see you here. I think Im finished tuning the ORQA MRK, now going over to the MRM. It’s was a real challenge to tune it. Thanks to Andy his video’s otherwise I would never get this done. Coming from Betaflight to Ardu… man… It’s a nightmare. So suprised there are not more in-dept videos for FPV tuning.
Tell me what videos you would like to see …
Hi @tomppa,
Can I ask what was the biggest challenge? Here are some possibilities that come to mind:
- soldering was difficult because pin mapping wasn’t clear
- Initial setup using MP was unintuitive and complicated
- getting the vehicle tuned was difficult
I also wonder if the wiki was any use or perhaps you didn’t refer to it much?
I’m hoping to work on improving AP’s ease of use a bit this year so just looking for some anecdotal feedback
Thank you so much for your reply.
It’s mainly the setup Using MP, Unintuitive and complicated.
You have to type in all those short letters to find what you want to tune or set up.
Would be interesting to have like sub menu’s for failsafe, gps, RC, Throttle settings,… option
Im using all the time Chatgpt, I referred it to the wiki page.
Using sliders like in betaflight to change pids and other tune parameters would be interesting, every time consuming and unintuitive to all the time typing in those small changes
Still the Methodic Configurator is a great tool but still complicated.
Was happy that Andy did a video about how he is using it.
I also didnt get Step reponse tool to work in webtools
Im used to PID TOOL BOX, looks similar like webtools.
More grapical interfaces and not all the time input numbers to get what you want. Just a drop down menu with choices to make ![]()
And more “starter-tune” presets for 3 to 8inch FPV quads.
Its hard to find a joshua bardwell or Chris Rosser for ardu PIlot. Andy is the only source who speaks kind of “normal” language about ardu- settings ![]()
Last question. I want to flash full settings, incl motor remapping, frame,… settings to a batch of drones. Can it be done with the Methodic Configurator?
Thanks
Greetings From Belgium
1 Like
Maybe more indept of the Methodic Configurator?
You have one but maybe even more in-dept?
Keep continue making those tunings for FPV quads… Thats the future, Europe needs you ![]()
1 Like
Hi, folks
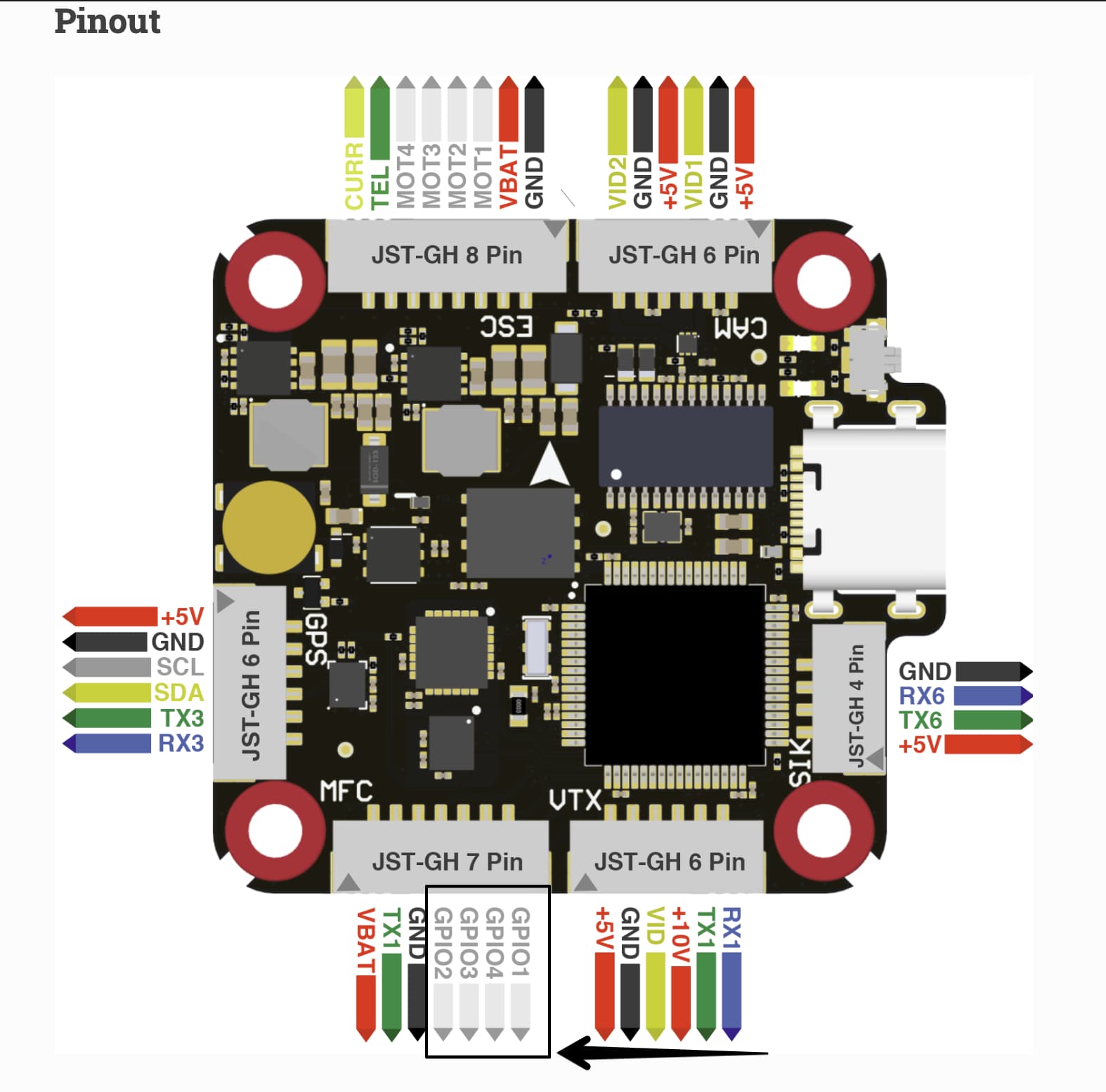
I have an Orqa F405 3030 FC flight controller
I want to connect to SERIAL6 - RaspberryPi5, but nothing works.
I looked at the pinout of the controller, and where the inscription “SIK” is Tx6/Rx6
I connected RPI5 to this UART
I check the connection with RPI5:
mavproxy.py --master=/dev/ttyAMA0 --baudrate=57600
I get: link 1 down
I tried to change baudrates - but it didn’t help
can you help me with this issue?
The pinout is correct according to the schematic
1 Like
connect expresselrs to Tx1/Rx1 where the inscription “VTX”
set settings:
set_parameter(f"SERIAL1_PROTOCOL", 23)
set_parameter(f"SERIAL1_BAUD", 115)
set_parameter(“RSSI_TYPE”,3)
set_parameter(“BRD_ALT_CONFIG”,1)
set_parameter(“RC_OPTION”,15136)
but MissionPlanner Tab “Setup-MandatoryHardware-RadioCalibration” does not respond to the RC stickMovements
and messages:
PreArm: RC not found
Post all your settings
I reconfigured the ELRS RX to UART6
SERIAL6_BAUD,115
SERIAL6_OPTIONS,0
SERIAL6_PROTOCOL,23
RC_OPTION,15136
BRD_ALT_CONFIG,1
RSSI_TYPE,3
and all correct working…
now I want to use UART1 to connect RPI5 Mavlink protocol
SERIAL1_BAUD,115 #use different bound rates
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,2
mavproxy.py --master=/dev/ttyAMA0 --baudrate=115200
Connect /dev/ttyAMA0 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from /dev/ttyAMA0
MAV> link 1 down
@andyp1per sorry to bother you
my mistake, I didn’t rx/tx cross.
I did it now, and it worked. And boud rate change to 921600
But when I connect Mission Planner TCP (mavlink-router on RPI5), it receives some parameters and then the eternal loop “Getting Params”…
mavlink-router logs:
Found host for streaming: ted:16060
Found host for streaming: mavlink-exporter:14550
/usr/bin/mavlink-routerd 0.0.0.0:5760 -e 10.89.0.12:16060 -e 10.89.0.9:14550 --log /usr/logs -T /usr/logs /dev/ttyAMA0:921600
mavlink-router version VERSION
Could not open conf file ‘/etc/mavlink-router/main.conf’ (No such file or directory)
Opened UART [4]CLI: /dev/ttyAMA0
UART [4]CLI: speed = 921600
Opened UDP Client [5]CLI: 10.89.0.12:16060
Opened UDP Client [7]CLI: 10.89.0.9:14550
Opened UDP Server [9]CLI: 0.0.0.0:5760
Opened TCP Server [10] [::]:5760
File 00354-2025-04-06_07-53-18.tlog not read-only yet, marking as RO
File 00355-2025-04-06_07-53-19.bin not read-only yet, marking as RO
Logging target system_id=1 on 00356-2025-04-06_07-59-52.tlog
Logging target system_id=1 on 00357-2025-04-06_07-59-53.bin
TCP [18]dynamic: Connection accepted
check mavproxy.py
mavproxy.py --master=/dev/ttyAMA0 --baudrate=921600
Connect /dev/ttyAMA0 source_system=255
Log Directory:
Telemetry log: mav.tlog
Waiting for heartbeat from /dev/ttyAMA0
MAV> Detected vehicle 1:1 on link 0
online system 1
STABILIZE> Mode STABILIZE
STABILIZE>
UPD: problem solved. Mavlink-router and connected usb-cable to PC (generate same sysid)
when i disconnected usb from PC - mavlink-router (proxy) work fine!!!
decided to redo everything:
- SERIAL1 = > ExpressELRS
- SERIAL6 = > MavLink2 (connected to RPI5)
FULL CONFIG
ACRO_BAL_PITCH,1
ACRO_BAL_ROLL,1
ACRO_OPTIONS,0
ACRO_RP_EXPO,0.3
ACRO_RP_RATE,360
ACRO_RP_RATE_TC,0
ACRO_THR_MID,0
ACRO_TRAINER,2
ACRO_Y_EXPO,0
ACRO_Y_RATE,202.5
ACRO_Y_RATE_TC,0
AHRS_COMP_BETA,0.1
AHRS_EKF_TYPE,3
AHRS_GPS_GAIN,1
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_OPTIONS,0
AHRS_ORIENTATION,0
AHRS_RP_P,0.2
AHRS_TRIM_X,0
AHRS_TRIM_Y,0
AHRS_TRIM_Z,0
AHRS_WIND_MAX,0
AHRS_YAW_P,0.2
ANGLE_MAX,3000
ARMING_ACCTHRESH,0.75
ARMING_CHECK,1
ARMING_MAGTHRESH,100
ARMING_MIS_ITEMS,0
ARMING_OPTIONS,0
ARMING_RUDDER,2
ATC_ACCEL_P_MAX,116700
ATC_ACCEL_R_MAX,116700
ATC_ACCEL_Y_MAX,27000
ATC_ANG_LIM_TC,1
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
ATC_ANG_YAW_P,4.5
ATC_ANGLE_BOOST,1
ATC_INPUT_TC,0.15
ATC_RAT_PIT_D,0.0036
ATC_RAT_PIT_D_FF,0
ATC_RAT_PIT_FF,0
ATC_RAT_PIT_FLTD,21
ATC_RAT_PIT_FLTE,0
ATC_RAT_PIT_FLTT,21
ATC_RAT_PIT_I,0.135
ATC_RAT_PIT_IMAX,0.5
ATC_RAT_PIT_P,0.135
ATC_RAT_PIT_PDMX,0
ATC_RAT_PIT_SMAX,0
ATC_RAT_RLL_D,0.0036
ATC_RAT_RLL_D_FF,0
ATC_RAT_RLL_FF,0
ATC_RAT_RLL_FLTD,21
ATC_RAT_RLL_FLTE,0
ATC_RAT_RLL_FLTT,21
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_IMAX,0.5
ATC_RAT_RLL_P,0.135
ATC_RAT_RLL_PDMX,0
ATC_RAT_RLL_SMAX,0
ATC_RAT_YAW_D,0
ATC_RAT_YAW_D_FF,0
ATC_RAT_YAW_FF,0
ATC_RAT_YAW_FLTD,0
ATC_RAT_YAW_FLTE,2
ATC_RAT_YAW_FLTT,21
ATC_RAT_YAW_I,0.018
ATC_RAT_YAW_IMAX,0.5
ATC_RAT_YAW_P,0.18
ATC_RAT_YAW_PDMX,0
ATC_RAT_YAW_SMAX,0
ATC_RATE_FF_ENAB,1
ATC_RATE_P_MAX,0
ATC_RATE_R_MAX,0
ATC_RATE_Y_MAX,0
ATC_SLEW_YAW,6000
ATC_THR_G_BOOST,0
ATC_THR_MIX_MAN,0.1
ATC_THR_MIX_MAX,0.5
ATC_THR_MIX_MIN,0.1
AUTO_OPTIONS,0
AUTOTUNE_AGGR,0.1
AUTOTUNE_AXES,7
AUTOTUNE_MIN_D,0.001
AVOID_ACCEL_MAX,3
AVOID_ALT_MIN,0
AVOID_ANGLE_MAX,1000
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_BACKZ_SPD,0.75
AVOID_BEHAVE,0
AVOID_DIST_MAX,5
AVOID_ENABLE,3
AVOID_MARGIN,2
BARO_ALT_OFFSET,0
BARO_ALTERR_MAX,2000
BARO_EXT_BUS,-1
BARO_FLTR_RNG,0
BARO_GND_TEMP,0
BARO_OPTIONS,0
BARO_PRIMARY,0
BARO_PROBE_EXT,0
BARO1_DEVID,423681
BARO1_GND_PRESS,98249.34
BARO2_DEVID,0
BARO2_GND_PRESS,0
BARO3_DEVID,0
BARO3_GND_PRESS,0
BATT_AMP_OFFSET,0
BATT_AMP_PERVLT,92.6
BATT_ARM_MAH,0
BATT_ARM_VOLT,22.1
BATT_CAPACITY,3300
BATT_CRT_MAH,0
BATT_CRT_VOLT,21
BATT_CURR_PIN,13
BATT_FS_CRT_ACT,0
BATT_FS_LOW_ACT,0
BATT_FS_VOLTSRC,0
BATT_LOW_MAH,0
BATT_LOW_TIMER,10
BATT_LOW_VOLT,21.6
BATT_MONITOR,4
BATT_OPTIONS,0
BATT_SERIAL_NUM,-1
BATT_VLT_OFFSET,0
BATT_VOLT_MULT,8.3
BATT_VOLT_PIN,11
BATT2_MONITOR,0
BATT3_MONITOR,0
BATT4_MONITOR,0
BATT5_MONITOR,0
BATT6_MONITOR,0
BATT7_MONITOR,0
BATT8_MONITOR,0
BATT9_MONITOR,0
BRD_ALT_CONFIG,1
BRD_BOOT_DELAY,0
BRD_OPTIONS,1
BRD_RTC_TYPES,1
BRD_RTC_TZ_MIN,0
BRD_SAFETY_DEFLT,0
BRD_SAFETY_MASK,16368
BRD_SAFETYOPTION,3
BRD_SD_SLOWDOWN,0
BRD_SERIAL_NUM,0
BTN_ENABLE,0
CAM_AUTO_ONLY,0
CAM_MAX_ROLL,0
CAM_RC_TYPE,0
CAM1_TYPE,0
CAM2_TYPE,0
CHUTE_ENABLED,0
CIRCLE_OPTIONS,1
CIRCLE_RADIUS,1000
CIRCLE_RATE,20
COMPASS_AUTO_ROT,2
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_DEC,0
COMPASS_DEV_ID,855297
COMPASS_DEV_ID2,0
COMPASS_DEV_ID3,0
COMPASS_DEV_ID4,0
COMPASS_DEV_ID5,0
COMPASS_DEV_ID6,0
COMPASS_DEV_ID7,0
COMPASS_DEV_ID8,0
COMPASS_DIA_X,1
COMPASS_DIA_Y,1
COMPASS_DIA_Z,1
COMPASS_DIA2_X,1
COMPASS_DIA2_Y,1
COMPASS_DIA2_Z,1
COMPASS_DIA3_X,1
COMPASS_DIA3_Y,1
COMPASS_DIA3_Z,1
COMPASS_DISBLMSK,0
COMPASS_ENABLE,1
COMPASS_EXTERN2,0
COMPASS_EXTERN3,0
COMPASS_EXTERNAL,1
COMPASS_FLTR_RNG,0
COMPASS_LEARN,0
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,0
COMPASS_ODI_Y,0
COMPASS_ODI_Z,0
COMPASS_ODI2_X,0
COMPASS_ODI2_Y,0
COMPASS_ODI2_Z,0
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFFS_MAX,1800
COMPASS_OFS_X,0
COMPASS_OFS_Y,0
COMPASS_OFS_Z,0
COMPASS_OFS2_X,0
COMPASS_OFS2_Y,0
COMPASS_OFS2_Z,0
COMPASS_OFS3_X,0
COMPASS_OFS3_Y,0
COMPASS_OFS3_Z,0
COMPASS_OPTIONS,0
COMPASS_ORIENT,0
COMPASS_ORIENT2,0
COMPASS_ORIENT3,0
COMPASS_PMOT_EN,0
COMPASS_PRIO1_ID,855297
COMPASS_PRIO2_ID,0
COMPASS_PRIO3_ID,0
COMPASS_SCALE,0
COMPASS_SCALE2,0
COMPASS_SCALE3,0
COMPASS_USE,1
COMPASS_USE2,0
COMPASS_USE3,0
CUST_ROT_ENABLE,0
DEV_OPTIONS,0
DISARM_DELAY,10
EK3_ABIAS_P_NSE,0.02
EK3_ACC_BIAS_LIM,1
EK3_ACC_P_NSE,0.35
EK3_AFFINITY,0
EK3_ALT_M_NSE,2
EK3_BCN_DELAY,50
EK3_BCN_I_GTE,500
EK3_BCN_M_NSE,1
EK3_BETA_MASK,0
EK3_CHECK_SCALE,100
EK3_DRAG_BCOEF_X,0
EK3_DRAG_BCOEF_Y,0
EK3_DRAG_M_NSE,0.5
EK3_DRAG_MCOEF,0
EK3_EAS_I_GATE,400
EK3_EAS_M_NSE,1.4
EK3_ENABLE,1
EK3_ERR_THRESH,0.2
EK3_FLOW_DELAY,10
EK3_FLOW_I_GATE,300
EK3_FLOW_M_NSE,0.25
EK3_FLOW_USE,1
EK3_GBIAS_P_NSE,0.001
EK3_GLITCH_RAD,25
EK3_GND_EFF_DZ,4
EK3_GPS_CHECK,31
EK3_GPS_VACC_MAX,0
EK3_GSF_RST_MAX,2
EK3_GSF_RUN_MASK,3
EK3_GSF_USE_MASK,3
EK3_GYRO_P_NSE,0.015
EK3_HGT_DELAY,60
EK3_HGT_I_GATE,500
EK3_HRT_FILT,2
EK3_IMU_MASK,1
EK3_LOG_LEVEL,0
EK3_MAG_CAL,3
EK3_MAG_EF_LIM,50
EK3_MAG_I_GATE,300
EK3_MAG_M_NSE,0.05
EK3_MAG_MASK,0
EK3_MAGB_P_NSE,0.0001
EK3_MAGE_P_NSE,0.001
EK3_MAX_FLOW,2.5
EK3_NOAID_M_NSE,10
EK3_OGN_HGT_MASK,0
EK3_OGNM_TEST_SF,2
EK3_POS_I_GATE,500
EK3_POSNE_M_NSE,0.5
EK3_PRIMARY,0
EK3_RNG_I_GATE,500
EK3_RNG_M_NSE,0.5
EK3_RNG_USE_HGT,-1
EK3_RNG_USE_SPD,2
EK3_SRC_OPTIONS,1
EK3_SRC1_POSXY,3
EK3_SRC1_POSZ,1
EK3_SRC1_VELXY,3
EK3_SRC1_VELZ,3
EK3_SRC1_YAW,1
EK3_SRC2_POSXY,0
EK3_SRC2_POSZ,1
EK3_SRC2_VELXY,0
EK3_SRC2_VELZ,0
EK3_SRC2_YAW,0
EK3_SRC3_POSXY,0
EK3_SRC3_POSZ,1
EK3_SRC3_VELXY,0
EK3_SRC3_VELZ,0
EK3_SRC3_YAW,0
EK3_TAU_OUTPUT,25
EK3_TERR_GRAD,0.1
EK3_VEL_I_GATE,500
EK3_VELD_M_NSE,0.5
EK3_VELNE_M_NSE,0.3
EK3_VIS_VERR_MAX,0.9
EK3_VIS_VERR_MIN,0.1
EK3_WENC_VERR,0.1
EK3_WIND_P_NSE,0.2
EK3_WIND_PSCALE,1
EK3_YAW_I_GATE,300
EK3_YAW_M_NSE,0.5
ESC_CALIBRATION,0
ESC_TLM_MAV_OFS,0
FENCE_ACTION,1
FENCE_ALT_MAX,100
FENCE_ALT_MIN,-10
FENCE_ENABLE,0
FENCE_MARGIN,2
FENCE_RADIUS,300
FENCE_TOTAL,0
FENCE_TYPE,7
FLIGHT_OPTIONS,0
FLTMODE_CH,5
FLTMODE_GCSBLOCK,0
FLTMODE1,0
FLTMODE2,0
FLTMODE3,0
FLTMODE4,0
FLTMODE5,0
FLTMODE6,0
FORMAT_VERSION,120
FRAME_CLASS,1
FRAME_TYPE,18
FRSKY_DNLINK_ID,27
FRSKY_DNLINK1_ID,20
FRSKY_DNLINK2_ID,7
FRSKY_OPTIONS,0
FRSKY_UPLINK_ID,13
FS_CRASH_CHECK,1
FS_DR_ENABLE,2
FS_DR_TIMEOUT,30
FS_EKF_ACTION,1
FS_EKF_FILT,5
FS_EKF_THRESH,0.8
FS_GCS_ENABLE,0
FS_GCS_TIMEOUT,5
FS_OPTIONS,16
FS_THR_ENABLE,1
FS_THR_VALUE,975
FS_VIBE_ENABLE,1
GCS_PID_MASK,0
GND_EFFECT_COMP,1
GPS_AUTO_CONFIG,1
GPS_AUTO_SWITCH,1
GPS_BLEND_MASK,5
GPS_DELAY_MS,0
GPS_DELAY_MS2,0
GPS_DRV_OPTIONS,0
GPS_GNSS_MODE,0
GPS_GNSS_MODE2,0
GPS_HDOP_GOOD,140
GPS_INJECT_TO,127
GPS_MIN_DGPS,100
GPS_MIN_ELEV,-100
GPS_NAVFILTER,8
GPS_POS1_X,0
GPS_POS1_Y,0
GPS_POS1_Z,0
GPS_POS2_X,0
GPS_POS2_Y,0
GPS_POS2_Z,0
GPS_PRIMARY,0
GPS_RATE_MS,200
GPS_RATE_MS2,200
GPS_RAW_DATA,0
GPS_SAVE_CFG,2
GPS_SBAS_MODE,2
GPS_TYPE,1
GPS_TYPE2,0
GUID_OPTIONS,0
GUID_TIMEOUT,3
INITIAL_MODE,0
INS_ACC_BODYFIX,2
INS_ACC_ID,1245450
INS_ACCEL_FILTER,10
INS_ACCOFFS_X,0.0747186
INS_ACCOFFS_Y,-0.1740167
INS_ACCOFFS_Z,19.43872
INS_ACCSCAL_X,1
INS_ACCSCAL_Y,1
INS_ACCSCAL_Z,1
INS_ENABLE_MASK,127
INS_FAST_SAMPLE,1
INS_GYR_CAL,1
INS_GYR_ID,2162954
INS_GYRO_FILTER,42
INS_GYRO_RATE,0
INS_GYROFFS_X,0.0340338
INS_GYROFFS_Y,0.0001938
INS_GYROFFS_Z,0.0151811
INS_HNTC2_ENABLE,0
INS_HNTCH_ENABLE,0
INS_LOG_BAT_CNT,1024
INS_LOG_BAT_LGCT,32
INS_LOG_BAT_LGIN,20
INS_LOG_BAT_MASK,0
INS_LOG_BAT_OPT,0
INS_POS1_X,0
INS_POS1_Y,0
INS_POS1_Z,0
INS_RAW_LOG_OPT,0
INS_STILL_THRESH,2.5
INS_TRIM_OPTION,1
INS_USE,1
LAND_ALT_LOW,1000
LAND_REPOSITION,1
LAND_SPEED,50
LAND_SPEED_HIGH,0
LGR_ENABLE,0
LOG_BACKEND_TYPE,4
LOG_BITMASK,176126
LOG_BLK_RATEMAX,0
LOG_DARM_RATEMAX,0
LOG_DISARMED,0
LOG_FILE_BUFSIZE,16
LOG_FILE_DSRMROT,0
LOG_FILE_MB_FREE,500
LOG_FILE_RATEMAX,0
LOG_FILE_TIMEOUT,5
LOG_MAV_BUFSIZE,8
LOG_MAV_RATEMAX,0
LOG_MAX_FILES,500
LOG_REPLAY,0
LOIT_ACC_MAX,500
LOIT_ANG_MAX,0
LOIT_BRK_ACCEL,250
LOIT_BRK_DELAY,1
LOIT_BRK_JERK,500
LOIT_SPEED,1250
MIS_OPTIONS,0
MIS_RESTART,0
MIS_TOTAL,0
MOT_BAT_CURR_MAX,0
MOT_BAT_CURR_TC,5
MOT_BAT_IDX,0
MOT_BAT_VOLT_MAX,25.2
MOT_BAT_VOLT_MIN,19.8
MOT_BOOST_SCALE,0
MOT_HOVER_LEARN,2
MOT_OPTIONS,0
MOT_PWM_MAX,2000
MOT_PWM_MIN,1000
MOT_PWM_TYPE,5
MOT_SAFE_DISARM,0
MOT_SAFE_TIME,1
MOT_SLEW_DN_TIME,0
MOT_SLEW_UP_TIME,0
MOT_SPIN_ARM,0.1
MOT_SPIN_MAX,0.95
MOT_SPIN_MIN,0.15
MOT_SPOOL_TIM_DN,0
MOT_SPOOL_TIME,0.5
MOT_THST_EXPO,0.2
MOT_THST_HOVER,0.2
MOT_YAW_HEADROOM,200
MSP_OPTIONS,0
MSP_OSD_NCELLS,0
NTF_BUZZ_ON_LVL,1
NTF_BUZZ_PIN,-1
NTF_BUZZ_TYPES,1
NTF_BUZZ_VOLUME,100
NTF_LED_BRIGHT,3
NTF_LED_LEN,1
NTF_LED_OVERRIDE,0
NTF_LED_TYPES,122887
OSD_ARM_SCR,0
OSD_BTN_DELAY,300
OSD_CELL_COUNT,-1
OSD_CHAN,0
OSD_DSARM_SCR,0
OSD_FONT,0
OSD_FS_SCR,0
OSD_H_OFFSET,32
OSD_MSG_TIME,10
OSD_OPTIONS,1
OSD_SW_METHOD,0
OSD_TYPE,1
OSD_TYPE2,0
OSD_UNITS,0
OSD_V_OFFSET,16
OSD_W_ACRVOLT,3.6
OSD_W_AVGCELLV,3.6
OSD_W_BATVOLT,10
OSD_W_NSAT,9
OSD_W_RESTVOLT,10
OSD_W_RSSI,30
OSD1_ACRVOLT_EN,0
OSD1_ACRVOLT_X,24
OSD1_ACRVOLT_Y,4
OSD1_ALTITUDE_EN,1
OSD1_ALTITUDE_X,23
OSD1_ALTITUDE_Y,8
OSD1_ARMING_EN,1
OSD1_ARMING_X,1
OSD1_ARMING_Y,1
OSD1_ASPD1_EN,0
OSD1_ASPD1_X,0
OSD1_ASPD1_Y,0
OSD1_ASPD2_EN,0
OSD1_ASPD2_X,0
OSD1_ASPD2_Y,0
OSD1_ASPEED_EN,0
OSD1_ASPEED_X,2
OSD1_ASPEED_Y,13
OSD1_ATEMP_EN,0
OSD1_ATEMP_X,0
OSD1_ATEMP_Y,0
OSD1_AVGCELLV_EN,0
OSD1_AVGCELLV_X,24
OSD1_AVGCELLV_Y,3
OSD1_BAT_VOLT_EN,1
OSD1_BAT_VOLT_X,24
OSD1_BAT_VOLT_Y,1
OSD1_BAT2_VLT_EN,0
OSD1_BAT2_VLT_X,0
OSD1_BAT2_VLT_Y,0
OSD1_BAT2USED_EN,0
OSD1_BAT2USED_X,0
OSD1_BAT2USED_Y,0
OSD1_BATTBAR_EN,1
OSD1_BATTBAR_X,1
OSD1_BATTBAR_Y,1
OSD1_BATUSED_EN,1
OSD1_BATUSED_X,23
OSD1_BATUSED_Y,3
OSD1_BTEMP_EN,0
OSD1_BTEMP_X,0
OSD1_BTEMP_Y,0
OSD1_CELLVOLT_EN,1
OSD1_CELLVOLT_X,1
OSD1_CELLVOLT_Y,1
OSD1_CHAN_MAX,2100
OSD1_CHAN_MIN,900
OSD1_CLIMBEFF_EN,0
OSD1_CLIMBEFF_X,0
OSD1_CLIMBEFF_Y,0
OSD1_CLK_EN,0
OSD1_CLK_X,0
OSD1_CLK_Y,0
OSD1_COMPASS_EN,1
OSD1_COMPASS_X,15
OSD1_COMPASS_Y,3
OSD1_CRSSHAIR_EN,0
OSD1_CRSSHAIR_X,0
OSD1_CRSSHAIR_Y,0
OSD1_CURRENT_EN,1
OSD1_CURRENT_X,25
OSD1_CURRENT_Y,2
OSD1_CURRENT2_EN,0
OSD1_CURRENT2_X,0
OSD1_CURRENT2_Y,0
OSD1_DIST_EN,0
OSD1_DIST_X,22
OSD1_DIST_Y,11
OSD1_EFF_EN,0
OSD1_EFF_X,22
OSD1_EFF_Y,10
OSD1_ENABLE,1
OSD1_ESC_IDX,0
OSD1_ESCAMPS_EN,0
OSD1_ESCAMPS_X,24
OSD1_ESCAMPS_Y,14
OSD1_ESCRPM_EN,0
OSD1_ESCRPM_X,22
OSD1_ESCRPM_Y,12
OSD1_ESCTEMP_EN,0
OSD1_ESCTEMP_X,24
OSD1_ESCTEMP_Y,13
OSD1_FENCE_EN,0
OSD1_FENCE_X,14
OSD1_FENCE_Y,9
OSD1_FLTIME_EN,0
OSD1_FLTIME_X,23
OSD1_FLTIME_Y,10
OSD1_FLTMODE_EN,1
OSD1_FLTMODE_X,2
OSD1_FLTMODE_Y,8
OSD1_FONT,0
OSD1_GPSLAT_EN,1
OSD1_GPSLAT_X,9
OSD1_GPSLAT_Y,13
OSD1_GPSLONG_EN,1
OSD1_GPSLONG_X,9
OSD1_GPSLONG_Y,14
OSD1_GSPEED_EN,1
OSD1_GSPEED_X,2
OSD1_GSPEED_Y,14
OSD1_HDOP_EN,0
OSD1_HDOP_X,0
OSD1_HDOP_Y,0
OSD1_HEADING_EN,1
OSD1_HEADING_X,13
OSD1_HEADING_Y,2
OSD1_HOME_EN,1
OSD1_HOME_X,14
OSD1_HOME_Y,1
OSD1_HOMEDIR_EN,1
OSD1_HOMEDIR_X,1
OSD1_HOMEDIR_Y,1
OSD1_HOMEDIST_EN,1
OSD1_HOMEDIST_X,1
OSD1_HOMEDIST_Y,1
OSD1_HORIZON_EN,1
OSD1_HORIZON_X,14
OSD1_HORIZON_Y,8
OSD1_LINK_Q_EN,0
OSD1_LINK_Q_X,1
OSD1_LINK_Q_Y,1
OSD1_MESSAGE_EN,1
OSD1_MESSAGE_X,2
OSD1_MESSAGE_Y,6
OSD1_PITCH_EN,0
OSD1_PITCH_X,0
OSD1_PITCH_Y,0
OSD1_POWER_EN,1
OSD1_POWER_X,1
OSD1_POWER_Y,1
OSD1_RESTVOLT_EN,0
OSD1_RESTVOLT_X,24
OSD1_RESTVOLT_Y,2
OSD1_RNGF_EN,0
OSD1_RNGF_X,0
OSD1_RNGF_Y,0
OSD1_ROLL_EN,0
OSD1_ROLL_X,0
OSD1_ROLL_Y,0
OSD1_RPM_EN,0
OSD1_RPM_X,2
OSD1_RPM_Y,2
OSD1_RSSI_EN,1
OSD1_RSSI_X,1
OSD1_RSSI_Y,1
OSD1_SATS_EN,1
OSD1_SATS_X,1
OSD1_SATS_Y,3
OSD1_SIDEBARS_EN,0
OSD1_SIDEBARS_X,4
OSD1_SIDEBARS_Y,5
OSD1_STATS_EN,0
OSD1_STATS_X,0
OSD1_STATS_Y,0
OSD1_TEMP_EN,0
OSD1_TEMP_X,0
OSD1_TEMP_Y,0
OSD1_THROTTLE_EN,1
OSD1_THROTTLE_X,24
OSD1_THROTTLE_Y,11
OSD1_TXT_RES,0
OSD1_VSPEED_EN,1
OSD1_VSPEED_X,24
OSD1_VSPEED_Y,9
OSD1_VTX_PWR_EN,0
OSD1_VTX_PWR_X,0
OSD1_VTX_PWR_Y,0
OSD1_WAYPOINT_EN,0
OSD1_WAYPOINT_X,0
OSD1_WAYPOINT_Y,0
OSD1_WIND_EN,0
OSD1_WIND_X,2
OSD1_WIND_Y,12
OSD1_XTRACK_EN,0
OSD1_XTRACK_X,0
OSD1_XTRACK_Y,0
OSD2_ENABLE,0
OSD2_ESC_IDX,0
OSD2_FONT,0
OSD2_LINK_Q_EN,0
OSD2_LINK_Q_X,1
OSD2_LINK_Q_Y,1
OSD2_TXT_RES,0
OSD3_ENABLE,0
OSD3_ESC_IDX,0
OSD3_FONT,0
OSD3_LINK_Q_EN,0
OSD3_LINK_Q_X,1
OSD3_LINK_Q_Y,1
OSD3_TXT_RES,0
OSD4_ENABLE,0
OSD4_ESC_IDX,0
OSD4_FONT,0
OSD4_LINK_Q_EN,0
OSD4_LINK_Q_X,1
OSD4_LINK_Q_Y,1
OSD4_TXT_RES,0
OSD5_ENABLE,0
OSD6_ENABLE,0
PHLD_BRAKE_ANGLE,3000
PHLD_BRAKE_RATE,8
PILOT_ACCEL_Z,250
PILOT_SPEED_DN,0
PILOT_SPEED_UP,250
PILOT_THR_BHV,0
PILOT_THR_FILT,0
PILOT_TKOFF_ALT,0
PILOT_Y_EXPO,0
PILOT_Y_RATE,202.5
PILOT_Y_RATE_TC,0
PLDP_DELAY,0
PLDP_RNG_MIN,0
PLDP_SPEED_DN,0
PLDP_THRESH,0.9
PSC_ACCZ_D,0
PSC_ACCZ_D_FF,0
PSC_ACCZ_FF,0
PSC_ACCZ_FLTD,0
PSC_ACCZ_FLTE,20
PSC_ACCZ_FLTT,0
PSC_ACCZ_I,1
PSC_ACCZ_IMAX,800
PSC_ACCZ_P,0.5
PSC_ACCZ_PDMX,0
PSC_ACCZ_SMAX,0
PSC_ANGLE_MAX,0
PSC_JERK_XY,5
PSC_JERK_Z,5
PSC_POSXY_P,1
PSC_POSZ_P,1
PSC_VELXY_D,0.5
PSC_VELXY_FF,0
PSC_VELXY_FLTD,5
PSC_VELXY_FLTE,5
PSC_VELXY_I,1
PSC_VELXY_IMAX,1000
PSC_VELXY_P,2
PSC_VELZ_D,0
PSC_VELZ_FF,0
PSC_VELZ_FLTD,5
PSC_VELZ_FLTE,5
PSC_VELZ_I,0
PSC_VELZ_IMAX,1000
PSC_VELZ_P,5
RALLY_INCL_HOME,1
RALLY_LIMIT_KM,0.3
RALLY_TOTAL,0
RC_FS_TIMEOUT,1
RC_OPTIONS,15136
RC_OVERRIDE_TIME,3
RC_PROTOCOLS,1
RC_SPEED,490
RC1_DZ,20
RC1_MAX,1900
RC1_MIN,1100
RC1_OPTION,0
RC1_REVERSED,0
RC1_TRIM,1500
RC10_DZ,0
RC10_MAX,1900
RC10_MIN,1100
RC10_OPTION,0
RC10_REVERSED,0
RC10_TRIM,1500
RC11_DZ,0
RC11_MAX,1900
RC11_MIN,1100
RC11_OPTION,0
RC11_REVERSED,0
RC11_TRIM,1500
RC12_DZ,0
RC12_MAX,1900
RC12_MIN,1100
RC12_OPTION,0
RC12_REVERSED,0
RC12_TRIM,1500
RC13_DZ,0
RC13_MAX,1900
RC13_MIN,1100
RC13_OPTION,0
RC13_REVERSED,0
RC13_TRIM,1500
RC14_DZ,0
RC14_MAX,1900
RC14_MIN,1100
RC14_OPTION,0
RC14_REVERSED,0
RC14_TRIM,1500
RC15_DZ,0
RC15_MAX,1900
RC15_MIN,1100
RC15_OPTION,0
RC15_REVERSED,0
RC15_TRIM,1500
RC16_DZ,0
RC16_MAX,1900
RC16_MIN,1100
RC16_OPTION,0
RC16_REVERSED,0
RC16_TRIM,1500
RC2_DZ,20
RC2_MAX,1900
RC2_MIN,1100
RC2_OPTION,0
RC2_REVERSED,0
RC2_TRIM,1500
RC3_DZ,30
RC3_MAX,1900
RC3_MIN,1100
RC3_OPTION,0
RC3_REVERSED,0
RC3_TRIM,1500
RC4_DZ,20
RC4_MAX,1900
RC4_MIN,1100
RC4_OPTION,0
RC4_REVERSED,0
RC4_TRIM,1500
RC5_DZ,0
RC5_MAX,1900
RC5_MIN,1100
RC5_OPTION,0
RC5_REVERSED,0
RC5_TRIM,1500
RC6_DZ,0
RC6_MAX,1900
RC6_MIN,1100
RC6_OPTION,0
RC6_REVERSED,0
RC6_TRIM,1500
RC7_DZ,0
RC7_MAX,1900
RC7_MIN,1100
RC7_OPTION,0
RC7_REVERSED,0
RC7_TRIM,1500
RC8_DZ,0
RC8_MAX,1900
RC8_MIN,1100
RC8_OPTION,0
RC8_REVERSED,0
RC8_TRIM,1500
RC9_DZ,0
RC9_MAX,1900
RC9_MIN,1100
RC9_OPTION,0
RC9_REVERSED,0
RC9_TRIM,1500
RCMAP_PITCH,2
RCMAP_ROLL,1
RCMAP_THROTTLE,3
RCMAP_YAW,4
RELAY1_FUNCTION,0
RELAY2_DEFAULT,0
RELAY2_FUNCTION,1
RELAY2_PIN,74
RELAY3_FUNCTION,0
RELAY4_FUNCTION,0
RELAY5_FUNCTION,0
RELAY6_FUNCTION,0
RNGFND_FILT,0.5
RNGFND1_TYPE,0
RNGFND2_TYPE,0
RNGFND3_TYPE,0
RNGFND4_TYPE,0
RNGFND5_TYPE,0
RNGFND6_TYPE,0
RNGFND7_TYPE,0
RNGFND8_TYPE,0
RNGFND9_TYPE,0
RNGFNDA_TYPE,0
RPM1_TYPE,0
RPM2_TYPE,0
RSSI_ANA_PIN,-1
RSSI_CHAN_HIGH,2000
RSSI_CHAN_LOW,1000
RSSI_CHANNEL,0
RSSI_PIN_HIGH,5
RSSI_PIN_LOW,0
RSSI_TYPE,3
RTL_ALT,1500
RTL_ALT_FINAL,0
RTL_ALT_TYPE,0
RTL_CLIMB_MIN,0
RTL_CONE_SLOPE,3
RTL_LOIT_TIME,5000
RTL_OPTIONS,0
RTL_SPEED,0
SCHED_DEBUG,0
SCHED_LOOP_RATE,400
SCHED_OPTIONS,0
SERIAL_PASS1,0
SERIAL_PASS2,-1
SERIAL_PASSTIMO,15
SERIAL0_BAUD,115
SERIAL0_PROTOCOL,2
SERIAL1_BAUD,115
SERIAL1_OPTIONS,0
SERIAL1_PROTOCOL,23
SERIAL3_BAUD,230
SERIAL3_OPTIONS,0
SERIAL3_PROTOCOL,5
SERIAL5_BAUD,115
SERIAL5_OPTIONS,0
SERIAL5_PROTOCOL,16
SERIAL6_BAUD,921
SERIAL6_OPTIONS,0
SERIAL6_PROTOCOL,2
SERVO_BLH_3DMASK,0
SERVO_BLH_AUTO,1
SERVO_BLH_BDMASK,0
SERVO_BLH_DEBUG,0
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,0
SERVO_BLH_POLES,14
SERVO_BLH_PORT,0
SERVO_BLH_RVMASK,0
SERVO_BLH_TEST,0
SERVO_BLH_TMOUT,0
SERVO_BLH_TRATE,10
SERVO_DSHOT_ESC,0
SERVO_DSHOT_RATE,0
SERVO_GPIO_MASK,0
SERVO_RATE,50
SERVO_RC_FS_MSK,0
SERVO1_FUNCTION,34
SERVO1_MAX,2000
SERVO1_MIN,1000
SERVO1_REVERSED,0
SERVO1_TRIM,1000
SERVO10_FUNCTION,0
SERVO10_MAX,1900
SERVO10_MIN,1100
SERVO10_REVERSED,0
SERVO10_TRIM,1500
SERVO11_FUNCTION,0
SERVO11_MAX,1900
SERVO11_MIN,1100
SERVO11_REVERSED,0
SERVO11_TRIM,1500
SERVO12_FUNCTION,0
SERVO12_MAX,1900
SERVO12_MIN,1100
SERVO12_REVERSED,0
SERVO12_TRIM,1500
SERVO13_FUNCTION,0
SERVO13_MAX,1900
SERVO13_MIN,1100
SERVO13_REVERSED,0
SERVO13_TRIM,1500
SERVO14_FUNCTION,0
SERVO14_MAX,1900
SERVO14_MIN,1100
SERVO14_REVERSED,0
SERVO14_TRIM,1500
SERVO15_FUNCTION,0
SERVO15_MAX,1900
SERVO15_MIN,1100
SERVO15_REVERSED,0
SERVO15_TRIM,1500
SERVO16_FUNCTION,0
SERVO16_MAX,1900
SERVO16_MIN,1100
SERVO16_REVERSED,0
SERVO16_TRIM,1500
SERVO2_FUNCTION,33
SERVO2_MAX,2000
SERVO2_MIN,1000
SERVO2_REVERSED,0
SERVO2_TRIM,1000
SERVO3_FUNCTION,35
SERVO3_MAX,2000
SERVO3_MIN,1000
SERVO3_REVERSED,0
SERVO3_TRIM,1000
SERVO4_FUNCTION,36
SERVO4_MAX,2000
SERVO4_MIN,1000
SERVO4_REVERSED,0
SERVO4_TRIM,1000
SERVO5_FUNCTION,0
SERVO5_MAX,1900
SERVO5_MIN,1100
SERVO5_REVERSED,0
SERVO5_TRIM,1500
SERVO6_FUNCTION,0
SERVO6_MAX,1900
SERVO6_MIN,1100
SERVO6_REVERSED,0
SERVO6_TRIM,1500
SERVO7_FUNCTION,0
SERVO7_MAX,1900
SERVO7_MIN,1100
SERVO7_REVERSED,0
SERVO7_TRIM,1500
SERVO8_FUNCTION,0
SERVO8_MAX,1900
SERVO8_MIN,1100
SERVO8_REVERSED,0
SERVO8_TRIM,1500
SERVO9_FUNCTION,0
SERVO9_MAX,1900
SERVO9_MIN,1100
SERVO9_REVERSED,0
SERVO9_TRIM,1500
SIMPLE,0
SR0_ADSB,0
SR0_EXT_STAT,2
SR0_EXTRA1,4
SR0_EXTRA2,4
SR0_EXTRA3,2
SR0_PARAMS,0
SR0_POSITION,2
SR0_RAW_CTRL,0
SR0_RAW_SENS,2
SR0_RC_CHAN,6
SR1_ADSB,4
SR1_EXT_STAT,4
SR1_EXTRA1,4
SR1_EXTRA2,4
SR1_EXTRA3,4
SR1_PARAMS,0
SR1_POSITION,4
SR1_RAW_CTRL,4
SR1_RAW_SENS,4
SR1_RC_CHAN,4
SR2_ADSB,0
SR2_EXT_STAT,0
SR2_EXTRA1,0
SR2_EXTRA2,0
SR2_EXTRA3,0
SR2_PARAMS,0
SR2_POSITION,0
SR2_RAW_CTRL,0
SR2_RAW_SENS,0
SR2_RC_CHAN,0
SR3_ADSB,0
SR3_EXT_STAT,0
SR3_EXTRA1,0
SR3_EXTRA2,0
SR3_EXTRA3,0
SR3_PARAMS,0
SR3_POSITION,0
SR3_RAW_CTRL,0
SR3_RAW_SENS,0
SR3_RC_CHAN,0
SR4_ADSB,0
SR4_EXT_STAT,0
SR4_EXTRA1,0
SR4_EXTRA2,0
SR4_EXTRA3,0
SR4_PARAMS,0
SR4_POSITION,0
SR4_RAW_CTRL,0
SR4_RAW_SENS,0
SR4_RC_CHAN,0
SRTL_ACCURACY,2
SRTL_OPTIONS,0
SRTL_POINTS,300
STAT_BOOTCNT,59
STAT_FLTTIME,0
STAT_RESET,1
STAT_RUNTIME,31879
SUPER_SIMPLE,0
SURFTRAK_MODE,1
SURFTRAK_TC,1
SYSID_ENFORCE,0
SYSID_MYGCS,255
SYSID_THISMAV,1
TCAL_ENABLED,0
TELEM_DELAY,0
THR_DZ,100
THROW_ALT_MAX,0
THROW_ALT_MIN,0
THROW_MOT_START,0
THROW_NEXTMODE,18
THROW_TYPE,0
TKOFF_RPM_MAX,0
TKOFF_RPM_MIN,0
TKOFF_SLEW_TIME,2
TKOFF_THR_MAX,0.9
TUNE,0
TUNE_MAX,0
TUNE_MIN,0
VTX_ENABLE,0
WP_NAVALT_MIN,0
WP_YAW_BEHAVIOR,2
WPNAV_ACCEL,250
WPNAV_ACCEL_C,0
WPNAV_ACCEL_Z,100
WPNAV_JERK,1
WPNAV_RADIUS,200
WPNAV_RFND_USE,1
WPNAV_SPEED,1000
WPNAV_SPEED_DN,150
WPNAV_SPEED_UP,250
WPNAV_TER_MARGIN,10
not working correct SERIAL1 and SERIAL6
when I try to connect,
it connects - but hangs up on Got Param STAT_RUNTIME
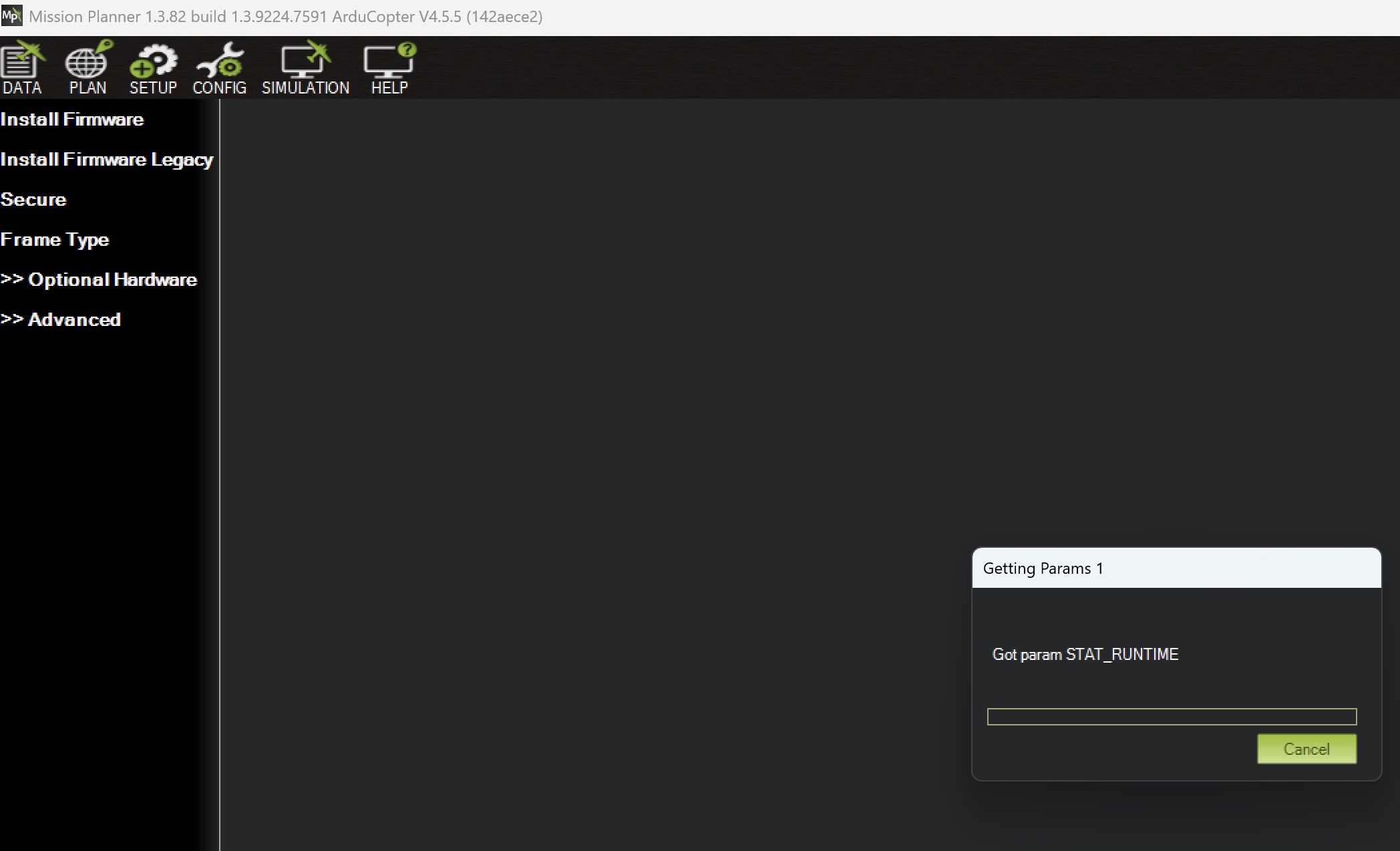
UPD: Problem solved.
BRD_ALT_CONFIG,0 (from ardupilot docs “For PPM and SBUS support on UART1_RX set BRD_ALT_CONFIG to 1.”)
but i use CRSF.
They are SERVO5 - SERVO8
thanks for quick answer @andyp1per
but can I remap servo5 to SERIAL TX port?
i wan’t connect to this pin VTX - SmartAudio for manage band/channels/power
It’s not a UART, you cannot use it for serial access
1 Like
thanks,
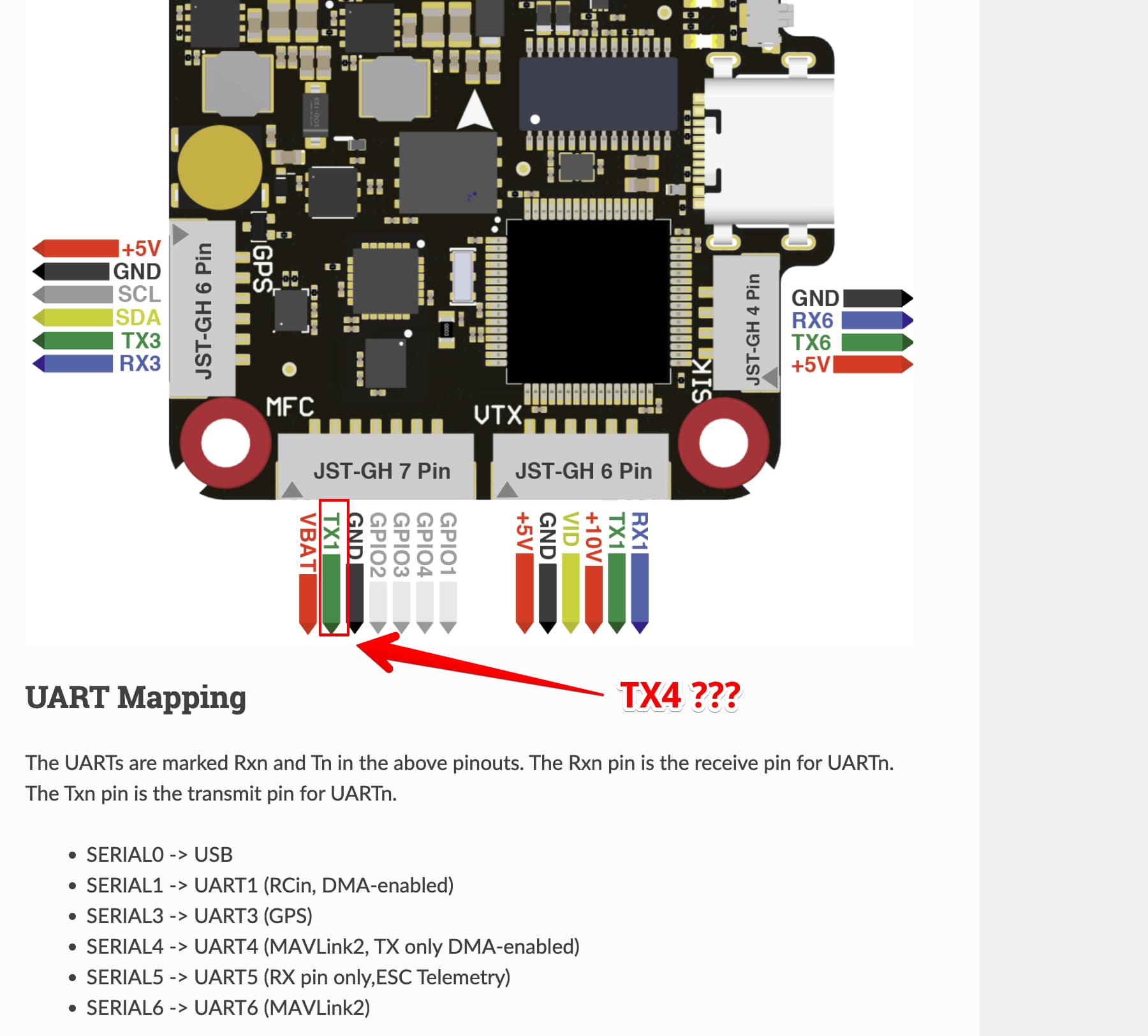
can you help me found SERIAL4 TX?
SERIAL4 → UART4 (MAVLink2, TX only DMA-enabled)