Hello

We were building a coaxial x8 with hereflow sensor for indoor purpose.
We followed the steps to calibrate the sensor according to the documentation and a reference video made by you on YouTube.
When we toggle the alt source mode to optical flow, the drone starts to drift.
We are using benewake lidar as a range finder.
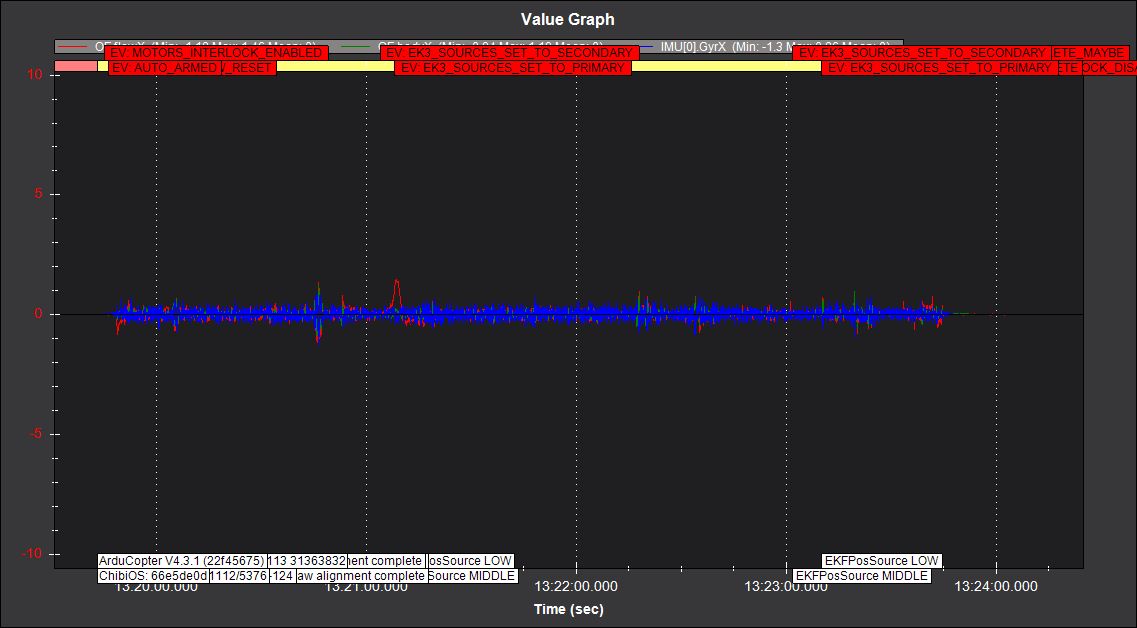
I have attached the logs of calibration and first flight.
https://drive.google.com/drive/folders/1_ZYcVMdQBa2PyvMGKccU0vLhSCcrL7Tq
Please help us to find where we have made a mistake.
Thank you