Thats a problem LOL. I saw that apm just makes 1 log. Why? More than 1 flight and i can’t find any logs, just the first one. I need to restart the drone everytime that i want a log in the next flight.
Yes logs are based from Power-on to Power-off
Well, i can test crash the drone again tomorrow, if you want, to get a log.
Dont have today’s log?
@ppoirier, another thing. When i set the opticalflow i saw that gyro is not stable anymore. It is always moving a little bit sideways.
And no, because i did not know that was needed a restart to get logs. Tomorrow i will get logs, no problem.
No you got something wrong here… I didnot realised that EKF was switching constantly
You have to investigate that, are you using a separate supply with capacitor for the Lidar?
No, i am not. The Lidar was working great in Alt Hold without any capacitor. I have done many flights without any problem with the lidar.
Well, my system does not reject the pc4flow constantly, you need to dig into that
1 Like
Hm, what can i do to start dig into this? I didn’t find anything like this 
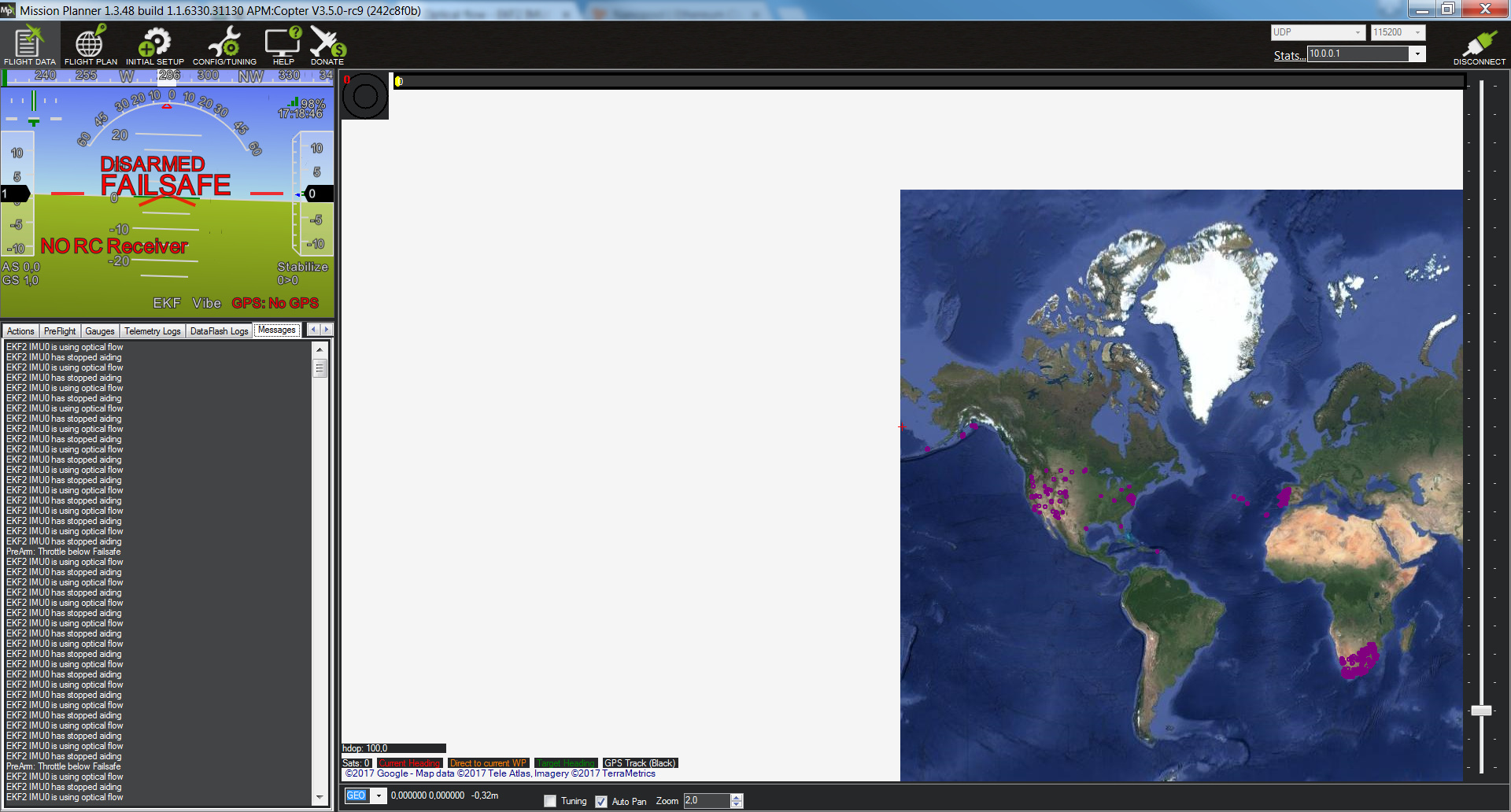
@LanderU, did you already saw anything like this with erlebrain? (image) Optical flow - EKF2 IMU0 has stopped aiding
Hi @josepgomes,
No, we test the PX4Flow long time ago.
If you attach the normal GPS to this port, works well?
Regards,
Hm, i’m using I2C. It’s supposed to use UART? GPS is with UART, right?
Hi @josepgomes,
our GPS module use both, I2C and UART. The I2C connection is for the external compass.
Regards,
Anyway, i don’t have the GPS module 
@JD-ETH, said that he was with the same issue. This seems more a erlebrain problem, because the settings in the docs are very simple… everything is configured.
So, no solutions for px4? @LanderU, Erlerobotics has documentation about px4 in their docs… it supposed to work. We bought it because of that.
i have the same problem. can you say some tips to help us to discover the malfunction of px4flow ?
Hi
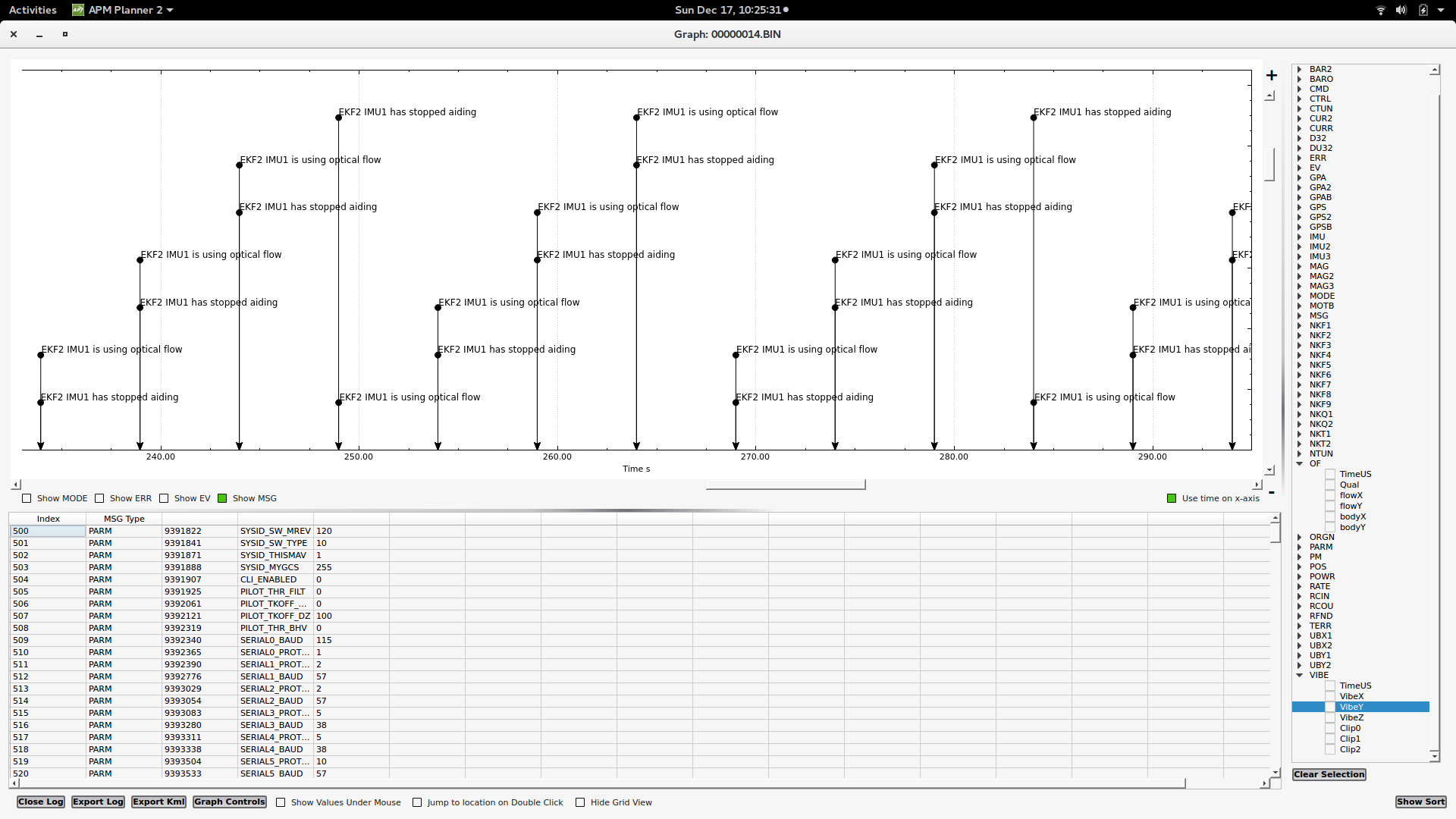
i get the following throughout the flight. Is that normal??
Loiter behavior is not ideal but copter maintains the position and yaw a little bit but the heading is maintained.
in order to align flowX/y and bodyX/y i needed to adjust scalers X/Y to 30/200.
Y is not in ideal lignment ~15% delta at peaks.
p13.param (13.5 KB)
EDIT:
after adjusting scalers to 5/5 (just for a test) copter is more stable. Still however it is not “pinned” above the ground as you see with phantoms 
Hello , I’m also facing the same issue with ekf3 imu stops aiding and optical flow sensor fused and vehicle will be difficult to control, the bin file is attached with this please help
163 01-01-1980 05-30-00(CRASHED LOG).bin (839.9 KB)