Yes ,
you can make your test fly no problem, as long as you have tuned and aligned the opticalflow signal with the IMU (like showned in the wiki).
It switching modes is accpetable as long as the opticalflow does regain control (EKF2 IMU0 is using optical flow). Otherwise you might have an issue with the opticalflow signal, that we could see in the log.
You have to be carefull in the sequence you pick the values in graph, because it may affect the way the data is presented, and somtimes you have to right click to get the right scaling. You are on the right track, experiment more until you get good reading.
FYI ; my values are around 5 for scaling
Now it is = 0 and the graph is equals. Can you explain me why we have to change that scale if the graph is equals? That’s why the drone crashed? Because i set the value at -200?
What values to zero? I just changed the scale parameter. Anyway, even in Alt Hold mode, the drone just went forward by itself. It can be because of optical flow, too?
Today we tested the copter. In alt hold with lidar it works fine. When we set px4flow, alt hold worked almost fine. Kind of instable, when we switched to land… controls stopped working and he crashed.
We tried in Loiter and we could not take off, the drone just felt sideways.
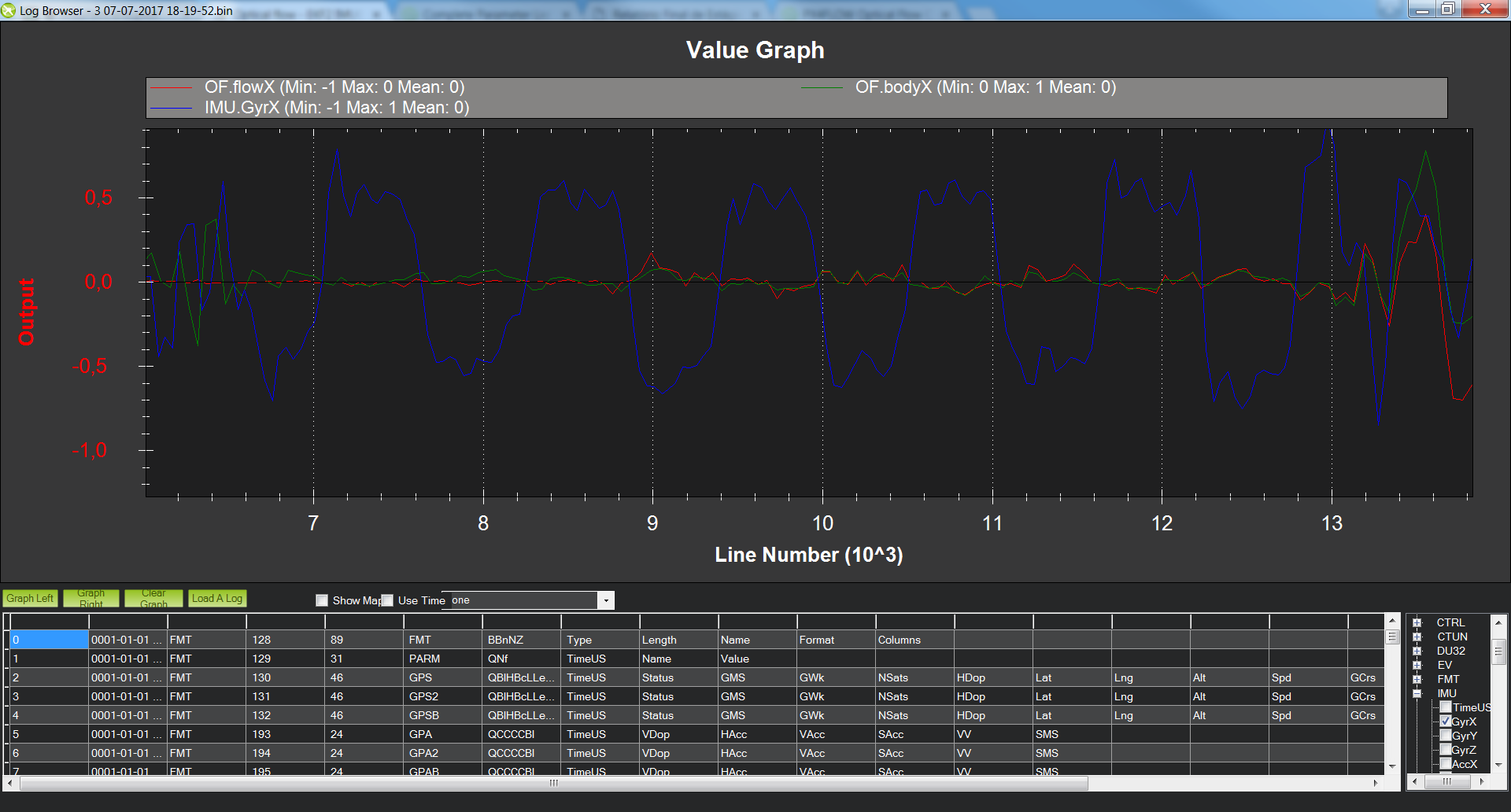
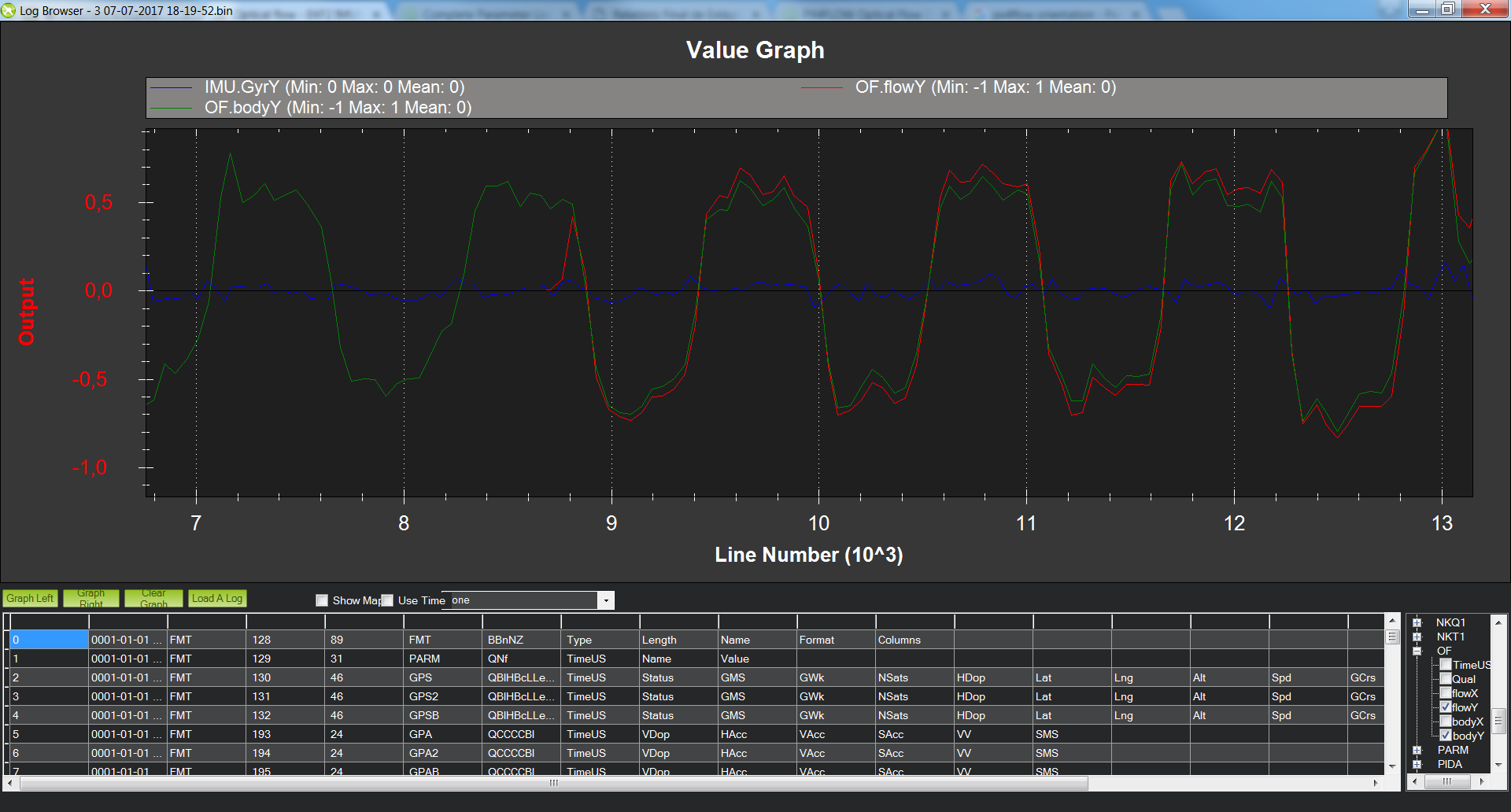
My charts are fine in X and Y.
Like @JD-ETH once said, i think nobody has ever managed to put px4flow working in erlebrain?