Hello everyone,
I have been trying to calibrate an optical flow sensor (HereFlow) for the last days. The sensor is already working, and after following the steps shown in https://ardupilot.org/copter/docs/common-optical-flow-sensor-setup.html I have been able to obtain good results in the X axis but not in Y.
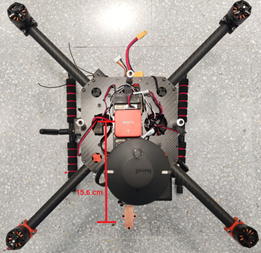
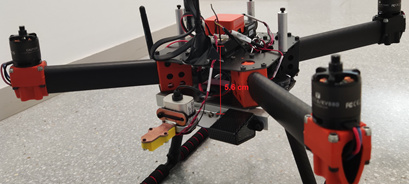
You can notice from the image, the OF sensor is not located at a certain distance from the cube, approximately 15,6 cm. After filling all the corresponding parameters in MissionPlanner in order to locate the sensor within the frame and applying them I am still getting an offset in the Y postion as I have mentioned above.
Just to make sure I was not changing the wrong parameters, I started to change the FLOW_POS_X and added extremely high numbers just to check if the logs showed any difference and then tried to find notably differences in the offset but it seems like it is barely changing.
The parameters I initially used were FLOW_POS_X = 0.156 , FLOW_POS_X = and FLOW_POS_Z = 0.056. (log35).
Tried changing the X distance trying different parameters like 0.4 , 0.7, 1, -1… but the changes obtained in the logs are not relevant at all.
At the end I tried combinations changing all the possible parameters including FLOW_ORIENT_YAW, but I’m still not able to get any better results in the Y axis.
If anyone knows what is going on and has any idea that can help me improve the results I would really appreciate it.
Best regards.
Link to the logs: https://www.dropbox.com/sh/27iak9u0b4ue8oa/AADnpUWQMzznwb_-bcmCT6nsa?dl=0