I try tuning new copter … on first take off , the pitch seems reversed…
What do you think …. Reverse pitch in radiocontroller or reverse pitch in arducopter Config ? And of course why ?
I try tuning new copter … on first take off , the pitch seems reversed…
What do you think …. Reverse pitch in radiocontroller or reverse pitch in arducopter Config ? And of course why ?
Revers the pitch on the Transmitter.
Hello,
I am using a RadioMaster T8-Lite to control a new self built drone based on a Mateksys F405-TE board. I can not reverse the pitch from the controller. Is there a way to reverse it from Ardupilot?
Thank you!
Try RC2_REVERSED,1 and Write Parameters. If it doesn’t work get a real radio that runs EdgeTx.
There is no harm in using the parameter rather than transmitter based reversal.
In fact, many times I prefer to use the onboard autopilot parameters to do so because then I can apply a default mix to any vehicle and manage the behavior on the autopilot itself.
My opinion is that Copter’s default pitch behavior is reversed from most users’ expectations, but it’d be a major breaking change to modify the firmware default at this point.
Thank you. I changed it and it worked perfectly.
The first drone kit I bought came with that radio so I am using it to build this 3D printed DIY drone.
But yes, I am aware it is low cost beginners radio transmitter.
Agree, do you know the historical reason 2000uS corresponds to nose up?
That was well before my time. And I think changing it would be a huge surprise to long term users. I wouldn’t mind a bit, but I’d hate to see the backlash…
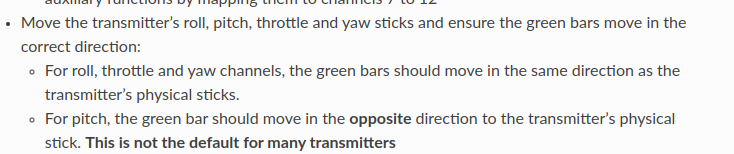
This would be a good thing to change on a major version bump. Most of the other autopilots I’ve used don’t have this quirk. I’m going to go make a wiki PR for that disclaimer to be in bold
Fair enough for now. I’m guessing 15 years ago, someone more versed in video games than aviation made a default that was comfortable for their personal preference, and it just stuck. It’s not the first time such things have happened…my day job sometimes includes combating such mindsets…
Similar to how the zoom wheel is opposite on google earth web and google earth pro (desktop).
PR is up! => Common: Make it clearer that you reverse pitch by Ryanf55 · Pull Request #5943 · ArduPilot/ardupilot_wiki · GitHub