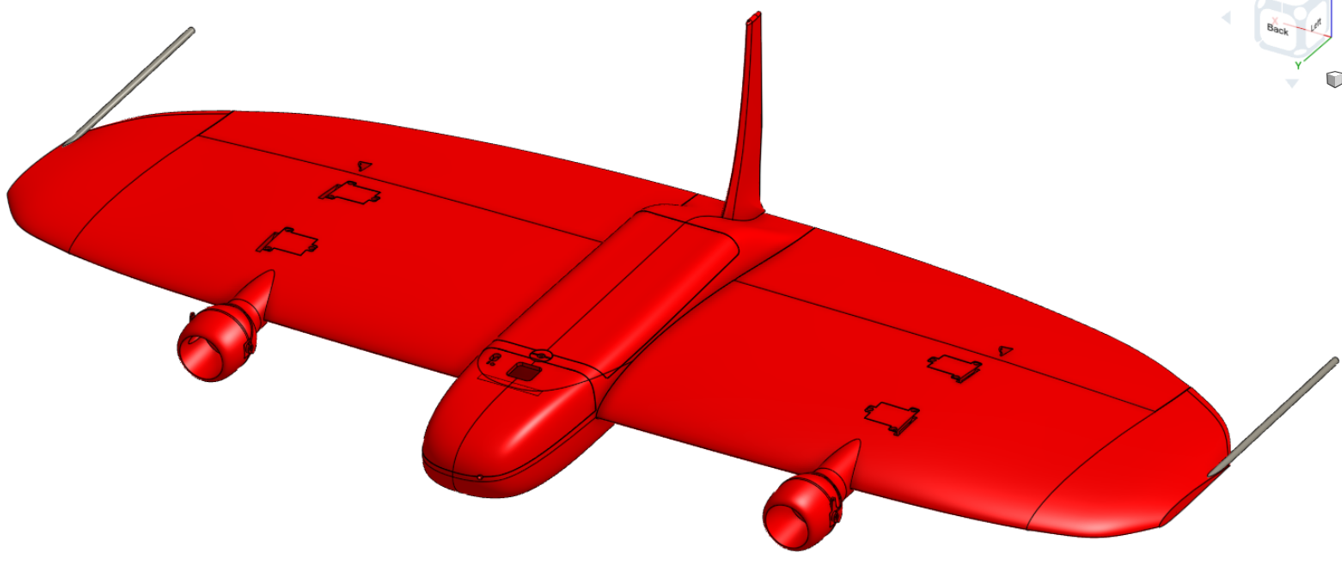
My name is Jeff H and I’m the Board President of Charity 1.0 and openSAR. net. Today we are excited to announce that we have a 3D printed airframe complete for our open-designed sUAS. Our first test flight will be this week and I will post a video after.
We are part of a Challenge.gov competition that is looking to increase detection odds in dense forest for first responders. You can read more here-
3D printed airframe and payload options for max $ savings.
Plan on using long range high resolution thermal camera to increase detection odds.
Our system includes a full training program ensuring new pilots know how to fully utilize our sUAS and optical systems.
We have found that crew training is the most critical factor in their success when searching for people with sUAS.
We hope to gather community support and volunteers to help fill gaps in our resumes and help with any issues along the way.
Our entire project will be open-designed under Creative Commons 4.0.
Key Features:
Tail-sitter VTOL airplane capable of fully automated missions.
3D printed parts and designs, allows for rapid development and repairs.
High Resolution Thermal Camera + Laser Range Finder + RGB Cameras. (Laser Moved to V2)
Hasty and detailed flight pattern searches using 3D printing algorithms.
Crew will be able to flag coordinates of “hotspots” for follow up or dispatch of ground SAR teams.
If you are interested in helping out please send an email to jeffh@opensar.net and we will get you plugged in. We need all sorts of help and are willing to guide newer people. =)
Click “Project Status” and you can find our solution doc, Bill of Materials, and other updates. I’ve been trying to update it at least every 2 weeks. Our next requirement is due in May 6th, which is a video review of the entire system working. We have a lot to do!
Thank you for your consideration and time! We are very open to all advice.
Absolutely! We called it “open-designed” because we are using parts that are not open-source but everything will be available on our website when it’s complete. It’s all licensed under creative commons 4.0 Creative Commons — Attribution 4.0 International — CC BY 4.0
If you want access to the Alpha plans or just want to hop into our discord to say hi, send me an email @ jeffh@opensar.net
We had our first “flight” this last weekend. Played in Qstabalize a bit and when I switched to QHover, it decided to take off into the trees. =) We didn’t tether it down because crashes are needed to learn where to improve this design. We are already on Revision 4 of our Alpha. The plane glued and taped back together in about an hour ready for more pain. LW-PLA is great stuff.
We will be releasing the full models and BOM on Thangs.com and our website later this week.
Version 2 with a longer wingspan and bigger fuselage is in the works as well.
Version 1 will continue to be our competition aircraft and will continue to be developed.
We have a Flir Duo Pro R on the way that we are working on a gimbal for. We started with a Sierra-Olympic Tenum 640, (AKA Tamarisk 640) specifically because of its size and refresh rate (60hz). But we pushed that off to V2 as well because of the complexities of the system and went with something we knew would work for this competition. (Flir Duo Pro R) We are running an SIYI HM30 and so far, absolutely LOVE it. Gui is good, screen is good, settings are easy. IP cameras encoded with H264 over the 5.8ghz link is clever. It has bluetooth, wifi, USBC, Ethernet, and Uart on the ground station. I’ll keep you all in the loop once we start getting range tests in.
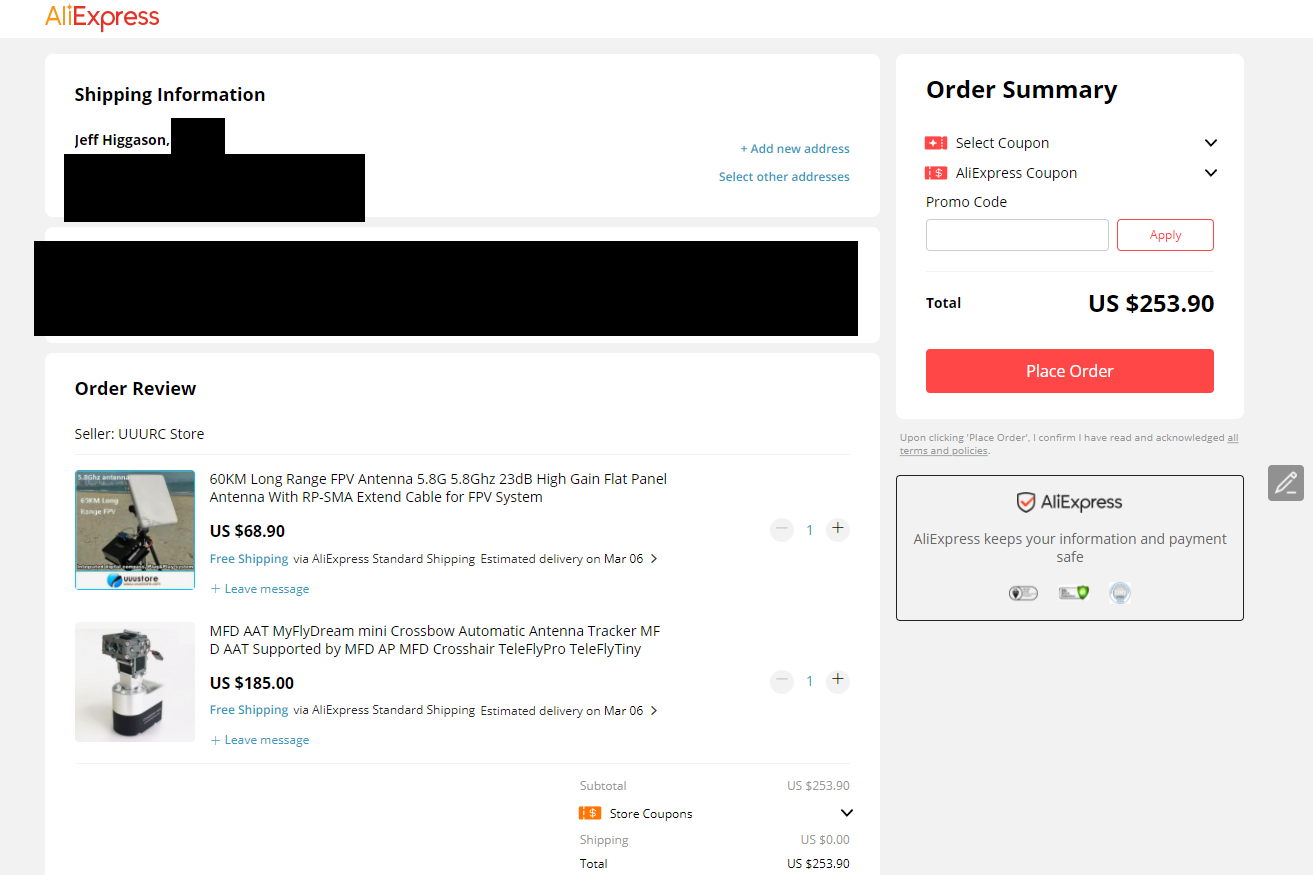
I just purchased an antenna tracker today. Have any of you used this model?
MyFlyDream mini Crossbow Automatic Antenna Tracker. If not- we soon will.
Some other thoughts: We think a lot of the instability is from the 4 foot carbon pole sticking out it’s front. Going to rethink our tether design.
The rates on the transmitter were just too high. When I finally felt comfortable I was barely nudging the sticks to move it.
In order to pick our TX controller I tested 3 models I thought would work well for our project.
We decided on a gamepad style controller because the form factor is everywhere. Almost anyone can pick up one of these controllers and have some sense of them doing this before. The big transmitters are just too intimidating.
Jumper T-Pro
Frsky X-lite Pro
Jumper T-Lite
Jumper T-Pro
This is the model I selected for V1 of the sUAS.
Pros:
$100 USD price point
JP 4in1 module - This adds flexibility in the system for tons of other recievers.
The top row of buttons is AWESOME for progressing through missions.
EdgeTX has really polished up things and the voice pack is better.
Plenty of other buttons for all your other options.
2 large batteries
The means a larger grip, better for my large hands. I feel like I have better control.
*USB C
Cons
The plastic feels like 90’s tech
The right thumb wheel thingy sucks. It’s hard to get a straight down push without slipping
I wish they included more than 3 buttons for the menus but they work.
None of these Cons are worth getting upset over so the choice was easy. The right price with the right features.
FrSky X-lite Pro
Pros
Feels amazing in my hands, it’s got that soft touch plastic feel. Who knows how it will hold up.
The gimbals are the best, and the thumbstick texture I really like.
It has the best menu system of any controller I’ve used. I love the little joystick.
It’s a good sized controller as well for my larger hands, and if you get larger batteries the grips extend.
The button placement and number of button and switches is great.
Cons
It’s expensive, more than we were willing to pay
The single FrSky radio in it locks you to their ecosystem. You may as well add a JP4in1 module to the cart at the same time.
It’s micro-usb and our first plans had us connecting the controller to the PC. I saw it lasting a week in the field before it was unusable. (New Plans connect directly to the HM30 with a X8R hooked up)
T-Lite
Pros
The cheapest of the group
Jp4in1
Cons
Weird shape and a bit strange to hold
Not enough switches/buttons in the right places
Very inexpensive feeling and looks like the softtouch isn’t going to last.
All that being said, it’s a fine transmitter for its price point. If this is all you have for budget, you can feel good knowing that it should last with the hall gimbals.
I did adjust all 3 of the transmitters stick tension by taking them apart. It was simple on all 3 models and I was able to quickly figure out which screw I needed to twist.
I got out again today and it was absolutely gorgeous out! I learned some things and had a very successful flight. One thing I noticed is that we are underpowered when the battery starts getting low. When I switched to qstabilize I was @75% to hover and that was 100% to save it. Thoughts on this?? I’m going to recalibrate my esc and make sure I’m hitting my maxes.
I have also ordered some 12x13 props instead of the 12x12s.
I’m going to tighten my throttle stick on my transmitter controller and make my deazones a wee bit bigger.
I’m going to turn up the yaw pids a bit to see if it will settle faster.
So I brought the plane out to my RC club and tried forward flight. Haven’t got a chance to look at the logs, but I can tell from what I saw it was a structural problem. It looked like a giant bird up in the air flapping it’s wings until it finally tacoed and took a nap.
I need to see how high we started from, but it was pretty far up. The electronics are all OK. And we have already started printing a revision 8 airframe. This plane was revision 1 where we quickly decided that 4mm rods and 1 wall with 7% infill was not enough to keep a plane together under high Gs…kind of like I just demonstrated for you above…LOL. Rev 2 has already addressed this by increasing the rod to 6mm, changing how the wings attach to the fuselage, and changing the design so that having 2 batteries in it, isn’t a requirement for strength.
As we have been learning to hover, we have crashed a lot so we already have made a ton of improvements to the model. Each time we crashed I was able to put it back together with superglue and accelerator with a little cross weave tape. I suppose that could have been a source for failure as well.
I’m going to print this Rev8 model with these settings:
Material LW-PLA
.6mm nozzle (Old .4mm)
Line Width .6mm (Old .4mm)
Layer Height .3mm (Old .25mm)
1 Wall Count
9% Gyroid Infill (Old 7% Cubic infill)
Temp 250C
2bottom 2top layers
Flow @ 45%
Speed: 40mm/s EVERYWHERE top to bottom 40mm/s
Retraction 2mm, you can’t do anything about stringing anyway, but a little does help. Go too high and you risk clogs. (The problem is that the chemical reaction causes pressure in the nozzle regardless of extrusion)
No FAN
Hello Jeff,
The video shows a stable hover with some wind, looks good.
But your plane seems to be not stable in plane mode as far I can see in the video. To my opinion, this is a CG problem.
Totally agree- that was where I was going to start as well. I’m thinking too far back- is that a correct assumption? On transition it did nose dive though…but that could have been it just stalling. (We estimated 25-30mph stall speed) I’ll look through the logs with my designer tomorrow and see what we can find out.
It seems that during the dive speed was, by far, high enough to recover from a stall.
This dive was typical of rear CG. Instead of returning to level like a correctly balanced plane do, it increased itself the dive. The autopilot had a hard time to level the plane and the required maneuver was so hard that it broke the wing.
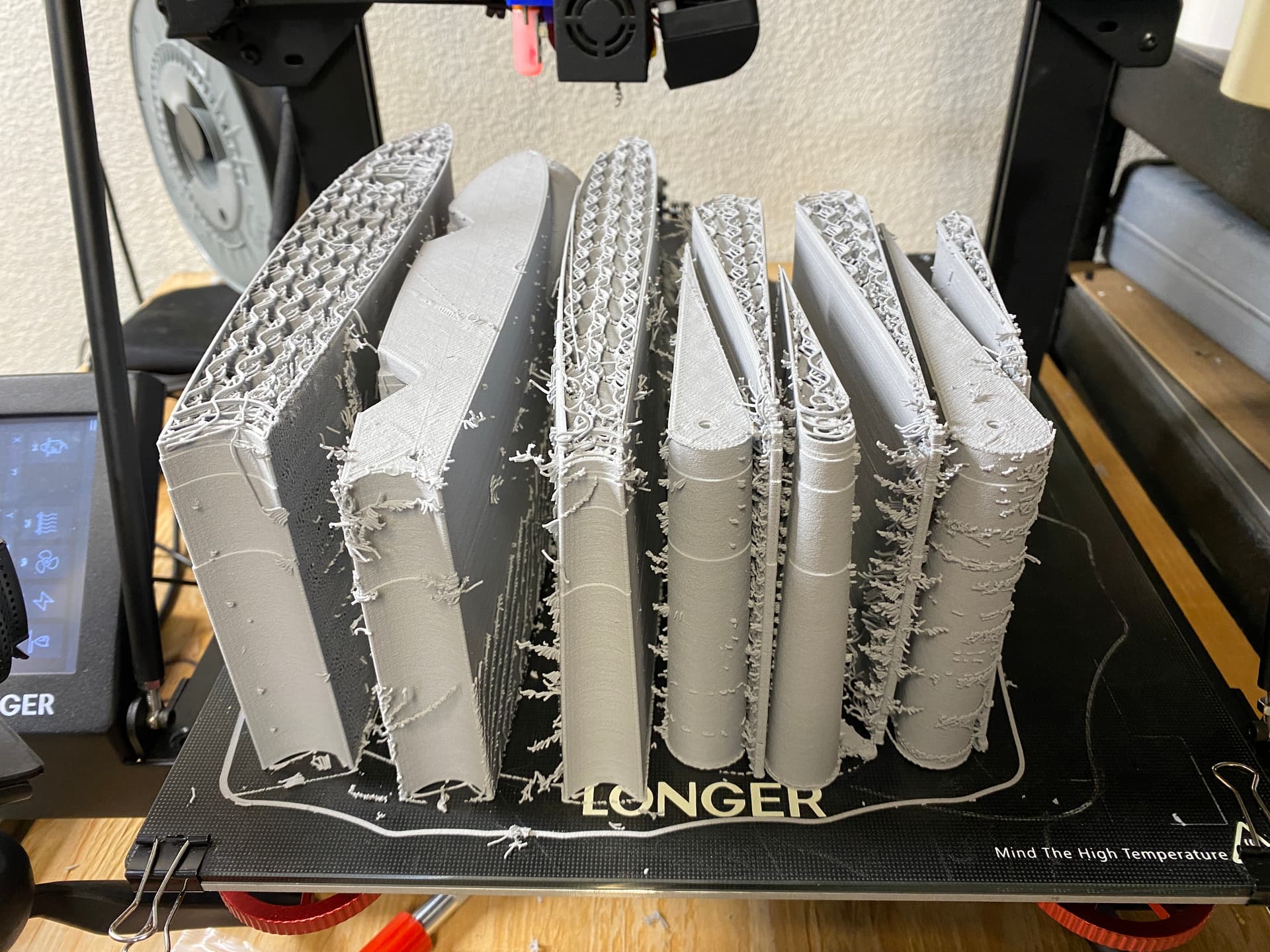
Well- 3D printer plate 2 failed due to belt stretch. It doesn’t look like the stock LK5-pro belts are fiberglass core. I’m going to replace both belts with something like this: Amazon.com
You can see 2 visible layer shifts and then right at the top it shifts a whole bunch:
Y belt got loose? Printing multiple parts with LW PLA will generate lots of stringing. Since you have large size bed printer, you can try ‘print one at a time’ if sliced in Cura to get clean output.
Guess you use 3DLabPrint’s PolyLight?, it foams more and comes lighter than other.
Yeah the Y belt is just a rubber belt that started to stretch. The first 2 layer skips were because of that. The rest of the mess was my fault, I then went too far the other way- the belt stretched and it was skipping like crazy. I’m surprised Longer went this route to be honest, everything else about this printer has been pretty great. Least belts are cheap. -EDIT- This is incorrect the belt is fiberglass core after cutting into it)
Yes it’s 3DLabPrint Polylight and we use the Polyair for some of the tougher parts. Our first plane was eSUN lw-pla and it was fine. I do agree this is better though.
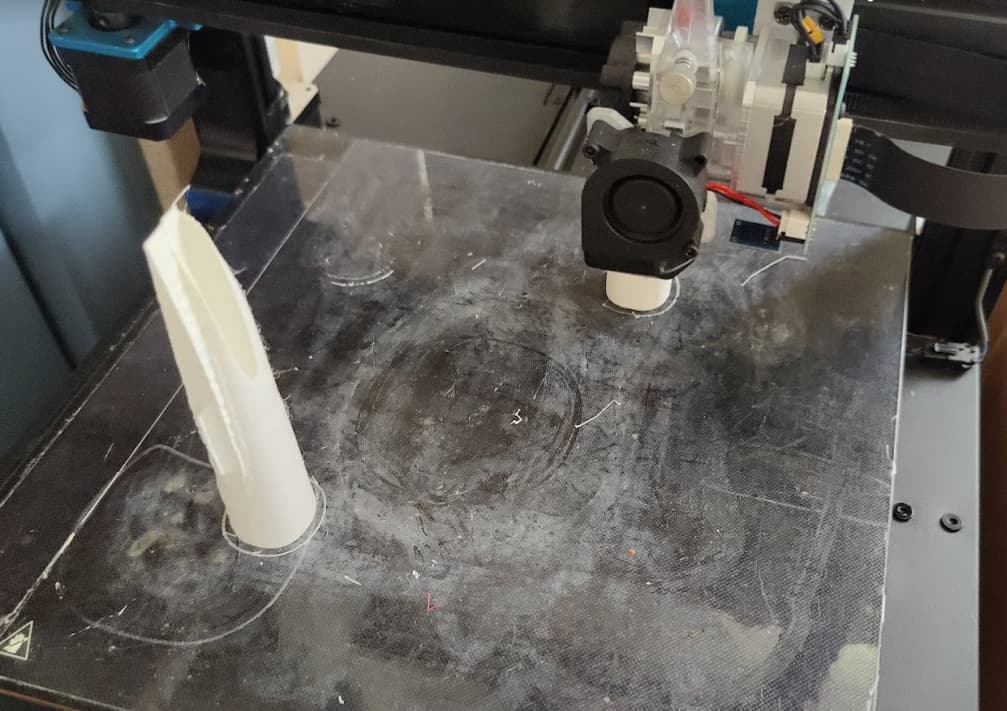
In case anyone is wondering, it is a Longer LK5-PRO with Klipper/Octoprint on a pi3. We switched to an all metal hotend, because LW-PLA foams at 250C. Best not to let your teflon tube get that hot. We put a bed level sensor on it for consistent first layers. This printer design only has 1- Z screw, so one side has a tendency to sag a bit over time if I’m not really paying attention.Now-Add fiberglass core belts to the list. =) Even with the addons- we are leaps and bounds less expensive still because the base printer goes on sale for $270.00. The bed is the stickiest bed I have ever had, I have trouble getting prints to release.
Thanks. Hope you can fix the belt soon. Low cost printers may take time to tame, but valuable once learned weak and maintenance points. I also swapped mine with all metal hotend. With direct and all metal LW PLA is easy and stable to print. If you have a chance to swap around hotend again, longer Volcano nozzle is nice. I found it foams LW PLA better with longer heat time.
Very nice to see more planes are printed!
The stock belt was fiberglass core- I think their mechanism for keeping the y belt tight is a bad design though. It doesn’t allow for easy tightening and can allow the belt to loosen over time if your bolts aren’t absolutely cranked down. I’ll probably work on a 3d printed design to make it a bit better and easier to get the correct level of tightness. This will be a good project to work on some onshape skills. =)
Besides that we are trying to get our model into realflight for simulator testing.
That will be interesting, more heat transfer may help. Curious to know the result.
LW PLA is strange, I am not sure only amount of heat transfer is enough, it needs time to expand and need to print slow. I have seen somebody at RCG tried with 3DLabPrint LW PLA at low flow rate (<40% down to 33%) 0.6mm, 3 perimeters. Result looks similar to foamy plane. Although it takes extremely long time to print. I have not tried in depth yet.









 Although it takes extremely long time to print. I have not tried in depth yet.
Although it takes extremely long time to print. I have not tried in depth yet.