bonjour,
pouvez vous preciser “après quelques tâtonnements pour créer un environnement adapté”
cordialement
Bonjour Guillaume, mes connaissances en Linux et en Python étant réduites, j’ai en effet “tâtonné” avant que cela décode, comme il fallait employer les mêmes versions de logiciels que la gendarmerie, j’ai créé un environnement virtuel en suivant le guide:https://www.codeflow.site/fr/article/how-to-install-python-3-and-set-up-a-local-programming-environment-on-ubuntu-16-04, j’ai donc copié le dossier complet du repo de la gendarmerie dans cet “environnement virtuel” dossier “testbalise/codegenda”
j’ai utilisé Wireshark pour vérifier le passage en mode monitoring de l interface, comme dit plus haut il ne faut pas oublier de déclarer l interface du PC dans le code, dans mon cas c’est “wlp4s1” que je retrouve en wlp4s1mon avec Wireshark quand le programme est lancé.
Bonne journée à tous.
Bravo Claude pour la mise en place du décodage de la Gendarmerie Nationale, j’ai eu quelques difficultés moi aussi et je n’ai d’ailleurs pas réussi à l’implanter sur Raspberry Pi 3 alors que le GitHub cite cette plateforme (l’interface Wifi intégrée refusant de se mettre en mode monitor avec airmon_ng). Mais OK sur PC Linux.
Je me demande maintenant si la balise INOSED émet les trames de signalement quand le drone n’est pas en vol. Si l’on en croit le texte de loi suivant :
Création Décret n°2019-1114 du 30 octobre 2019 - art. 1*
*
Est punie de l’amende prévue pour les contraventions de la cinquième classe l’émission volontaire d’un signalement électronique ou numérique, mentionné au premier alinéa de l’article L. 34-9-2, n’émanant pas d’un aéronef circulant sans personne à bord enregistré sur le registre mentionné à l’article R. 124-2 du code de l’aviation civile ou ne correspondant pas à un vol effectif, en cours au moment de l’émission de ce signalement électronique ou numérique.
La balise DIY ne prend pas cette précaution, est-ce que les pro le font ?
Avec une entrée MavLink dans la balise, il est très facile de savoir si le drone est en vol (via la valeur de la variable Base_mode du message MAVLINK_MSG_ID_HEARTBEAT), mais avec une entrée GPS NMEA, c’est plus difficile… Même à l’arrêt, le drone peut sembler se déplacer selon le drift horizontal du GPS…
Bien cordialement, Patrick
Bonjour, il n y a pas de vérification de situation de vol effectif, pour tester, j’ai la balise INOSED dans le jardin, donc bien fixe et je reçois les trames, c’est surement demandé pour dissuader de taquiner les gendarmes autour des endroits sensibles en y cachant quelques balises…
La petite doc de la balise dit “portée de 1 km” j’ai un peu de mal à y croire, dès la fin du mauvais temps, je vais effectuer quelques vols afin de vérifier si la balise ne perturbe pas le récepteur et vérifier sa portée, je vais peut être bricoler une petite antenne 2.4 Ghz directive pour cela
On pourrait imaginer de bloquer le Tx du GPS par une sortie du contrôleur de vol, vu le peu de dynamique de ce sujet en ce moment je vais attendre.
A ce propos pour une histoire de vol de chiens autour de chez moi, j’ai vu les gendarmes plusieurs fois, aucun n 'était informé des règles applicables maintenant, ni d un outil ou d une appli de surveillance des balises.
.
Pour le Rasperry, je me dégonfle pour l instant, j’ai cru comprendre qu il fallait utiliser une interface WIFI externe.
Voila, bon dimanche à tous.
bonjour,
j ai reussi a faire fonctionner le tout…
mais cela ne fonctionne pas avec toute les clés wifi (bien qu’elles acceptent le mode monitoring)
celle ci fonctionne sans probleme * TP-Link TL-WN722N (version 1) mais celle la:
AWUS1900wifi a/b/g/n bi-bande (2Ghz et 5Ghz)
me renvoie un message d erreur apres un control C
Lancement du script.
Lancement du mode monitor.
Mode monitor de l’interface wlan0
^CProcess json:
Arret du script.
Error in atexit._run_exitfuncs:
Traceback (most recent call last):
File “/usr/lib/python3.8/multiprocessing/popen_fork.py”, line 27, in poll
pid, sts = os.waitpid(self.pid, flag)
File “main.py”, line 74, in signal_handler
monitorStop()
File “main.py”, line 59, in monitorStop
airmon_ng(“stop”, interface_wifi).exit_code == 0
File “/home/bigboss/Documents/ReceptionInfoDrone-master/lib/sh/sh.py”, line 1427, in call
return RunningCommand(cmd, call_args, stdin, stdout, stderr)
File “/home/bigboss/Documents/ReceptionInfoDrone-master/lib/sh/sh.py”, line 774, in init
self.wait()
File “/home/bigboss/Documents/ReceptionInfoDrone-master/lib/sh/sh.py”, line 792, in wait
self.handle_command_exit_code(exit_code)
File “/home/bigboss/Documents/ReceptionInfoDrone-master/lib/sh/sh.py”, line 815, in handle_command_exit_code
raise exc
lib.sh.sh.ErrorReturnCode_1:
RAN: /usr/sbin/airmon-ng stop wlan0
STDOUT
PHY Interface Driver Chipset
phy0 wlan0 rtl88XXau Realtek Semiconductor Corp. RTL8814AU 802.11a/b/g/n/ac
You already have a wlan0 device but it is NOT in station mode.
Whatever you did, don’t do it again.
Please run “iw wlan0 del” before attempting to continue
des idees ??
Bonjour,
J’ai commencé par une carte Lilygo TTGO Beam mais je l’ai trouvée bien lourde et encombrante pour mes modèles avions et motoplaneurs qui font moins de 2kg.
Comme j’ai plusieurs weMos D1 mini qui tournent à la maison pour des appli domotiques, je pensais à adapter le sketch de khancyr.
J’ai été bien heureux de trouver ici le travail déjà fait.
J’ai aussi utilisé l’appli Android car j’avais une carte ESP-32 DEV KIT dans ma boite à composants et maintenant j’attends mon trigramme.
Alors je félicite et remercie beaucoup tous ceux qui ont participé à mettre au point cet ensemble.
Oui ai2.appinventor.mit.edu donne beaucoup de possibilité. Ton programme est il partagé ?
Hervé
Bonjour,
Je ne sais pas si quelqu’un a développé une appli spécifique.
C’est TigerWill qui a suggéré d’utiliser celle-ci :
https://play.google.com/store/apps/details?id=de.kai_morich.serial_bluetooth_terminal&hl=en_US
Voir son post du 23/07/2020. Ça fonctionne très bien en effet.
Bonjour à tous, je voulais d’abord vous dire MERCI et BRAVO à tous pour ce projet.
j’ai lu depuis le début la discussion , je ne comprends pas tout (je découvre Arduino) et ne suis pas très fort en programmation informatique 
Pour ma part j’ai commandé mes cartes ESP8266 et les BN-180 suivant les liens cités plus haut.
Quelqu’un pourrait refaire un tuto rapide incluant les schémas de raccordements + quoi et comment programmer en Arduino le ESP ? Merci 
Autres questions : quel poids au final ça fait tout ça sans batterie LiPo ? La consommation électrique ?
Merci pour vos retours.
J utilise aussi appinventor
Ton problème est il disponible en téléchargement ?
Merci
Bonjour,
Là j’ai besoin de votre aide, j’ai suivi tout le tuto mais j’ai “NO MSP data” dans l’afficheur du moniteur série 
J’ai loupé quelque chose ?? 
Merci pour votre aide.
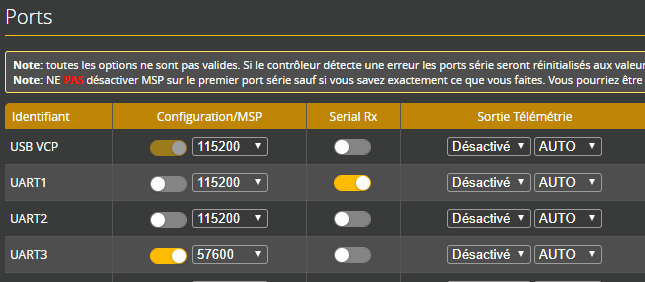
As-tu activé le mode MSP sur le port série que tu utilises sur le FC ?
Exemple: activation du MSP sur le port 3
Humm… euh je parle dans la fenêtre d’affichage du moniteur série Arduino ! Là je plane à fond pour programmer la balise d’identification électronique 
Mon GPS clignote bien en rouge (Fix 3D) relié sur le D1 Mini ESP8266 comme sur votre schéma, j’obtiens bien la canal 6 en WIFI avec WIFI ANALYSER mais “No GPS data” qui s’affiche.
J’aurais voulu que l’on m’explique tous les paramètres à rentrer dans Arduino et surtout quel code à prendre en compte car vous en avez mis une paire (MSP , ESP32 ???), avec l’application de test sur smartphone de la balise en APK ?? Le quel faut-il choisir ?
Merci
Vous avez dû utiliser le code de la version MSP !
Pour utiliser un D1 mini avec un GPS BN220/180 c’est ici : https://github.com/dev-fred/GPS_Tracker_ESP8266
Merci pour le retour voilà on part sur une base propre !
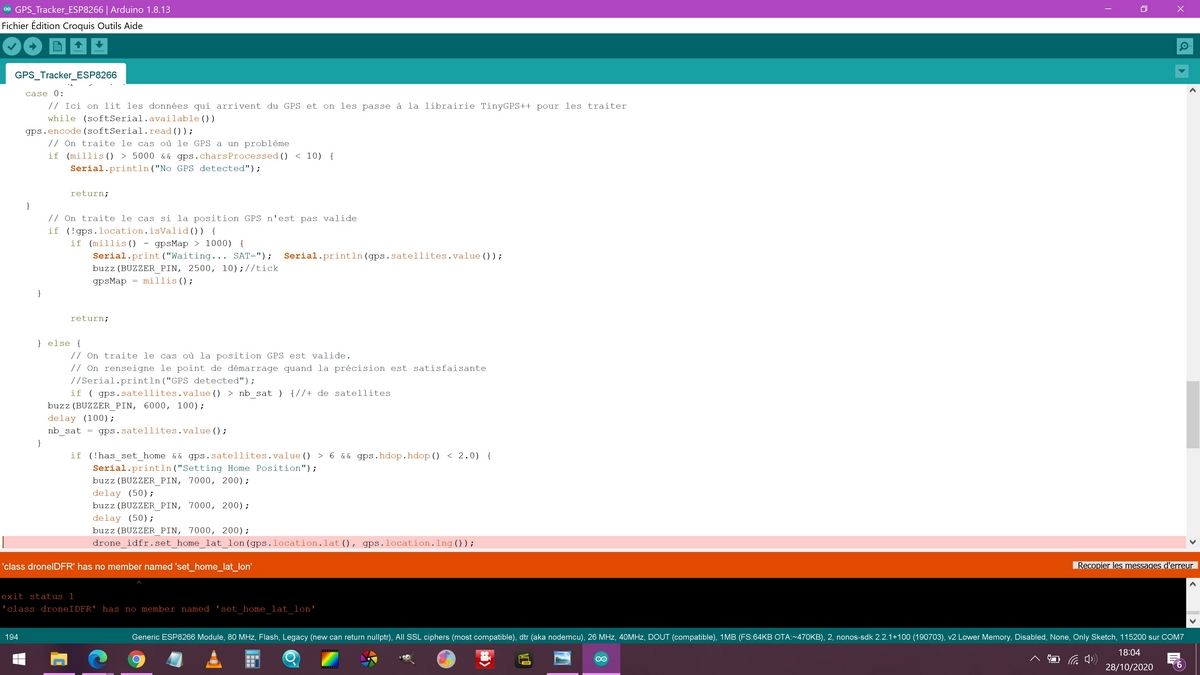
Je vérifie le code dans Arduino, j’obtiens ceci en message d’erreur :
‘class droneIDFR’ has no member named ‘set_home_lat_lon’
D’après ce que j’ai compris il faut reprendre le fichier .h de F5SOH et le mettre à la place du votre ?
L’erreur provient de mon coté, ma version de fichier droneID_FR.h n’était plus compatible avec GPS-Tracker_ESP2266.ino après une mise à jour.
J’ai remis à jour https://github.com/dev-fred/GPS_Tracker_ESP8266
Je dois sûrement loupé une étape c’est pas possible  désolé pour mon incompétence avec Arduino mais j’essaie
désolé pour mon incompétence avec Arduino mais j’essaie  : j’ai toujours le message d’erreur.
: j’ai toujours le message d’erreur.
- je clique sur lien que tu as mis à jour.
- je clique sur le bouton vert pour télécharger en ZIP.
- je décompresse le ZIP dans un dossier (là il y a tous les fichiers avec les images des câblages).
- je vais chercher le fichier INO qui s’ouvre bien avec IDE Arduino, pas de soucis , il me demande de confirmer le déplacement , je fais “OUI”.
- je fais vérifier (la coche en V) et boom l’erreur qui apparait .
J’ai une question : les 2 fichiers “droneID_fr.h” et “README.md” ils vont où ? Ils restent là , ou bien ?
Ce ne serait pas une question de paramétrage du module GPS sous U-Center des fois ?
Merci pour ta patience.
Tu devrais avoir le fichier droneID_FR.h dans le même répertoire que GPS_Tracker_ESP8266.ino
Il faut que tu renommes GPS_Tracker_ESP8266-master en GPS_Tracker_ESP8266 pour avoir le même nom que GPS_Tracker_ESP8266.ino sinon il va créer un sous-répertoire GPS_Tracker_ESP8266 avec GPS_Tracker_ESP8266.ino dedans mais il manquera le fichier droneID_FR.h
Salut ! Bonne nouvelle j’arrive à voir les trames dans le moniteur série Arduino !!
Lat / Long / Alt / Sat . Enfin …
Ce que je ne comprends pas c’est que je l’ai fait sur un 2nd PC et là ça fonctionne 
Je verrais ce que ça donne sur le 1er pour voir et chercher pourquoi ça ne fonctionne pas.
Restes plus qu’à trouver la solution pour la réception des données sur un smartphone, si quelqu’un lit ce post, qu’il m’aiguille un peu 
Encore merci !
Les puces ESP sont capable d’être utilisé comme un petit serveur web ! Il suffit donc de faire une page qui affiche les informations reçues.
Un petit exercice sympa pour les soirées confinements 