By “serial” protocol - do you mean the FETtec specific protocol?
I didn’t choose this FETtec 20x20 ESC - I’m helping out a team that selected it. I think their reasons were it’s small 20x20 form factor and the praise for FETtec among the ArduPilot crowd. Frankly, a half price 20x20 SpeedyBee ESC running BLHeli_S would have worked just as well.
When I got started with this ESC, my plan was to just use Dshot-600, and BLHeli pass-through for configurating.
I had no idea that FETtec had a proprietary signal protocol, and special wiring requirements to support it.
Since the FETtec docs talk about BetaFlight passthrough (and KISS) and that the ArduPilot wiki on the BLHeli pass-through say it’s for BLHeli and other ESCs - I was really surprised that the ArduPilot BLHeli passthrough doesn’t work for their configurator.
Then when @TeeZee showed me how to hard-wire a half-duplex connection to a serial port - I began to understand why BLHeli passthrough didn’t work.
My guess is that if you implement the FETtec protocol with proper wiring and ArduPilot protocols, you could get some sort of pass-through working via ArduPilot - but that isn’t clear to me from the wiki.
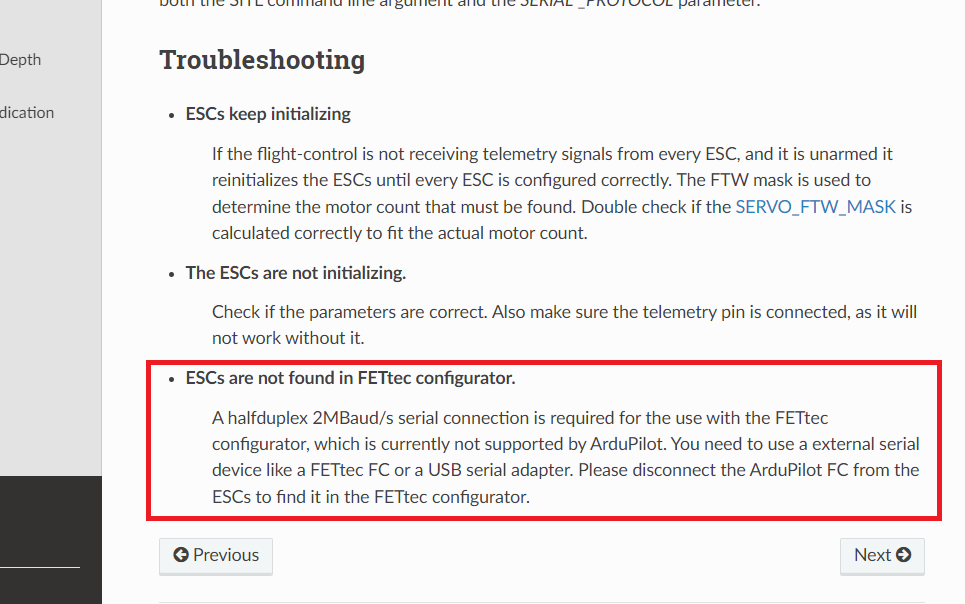
Some of the things that mystified me in the wiki (or maybe in a Discuss thread) was something about the four motor leads needed to be connected in parallel. And then there’s the note about half-duplex and 2M baud not being supported - which it appears to be. The docs were a challenge for me.
Maybe if the wiki were re-written so that someone can see the connectivity options and their tradeoffs I might have gone a different route. Or maybe I just had too many assumptions in my head when I read it - and I failed to properly understand the wiki.
As I understand it now - there are three basic connectivity functions:
- the motor signals from the flight controller to the ESC.
- The telemetry signal from the ESC to the flight controller.
- The FETtec Configurator connection to the APP running on a PC.
From what I understand so far, if you don’t implement 2) above, then the only way to accomplish 3) is to use the hardware half-duplex wiring that @TeeZee provided for me.
If you can help clarify my thinking on any of these details, I’d really appreciate it. Thanks!