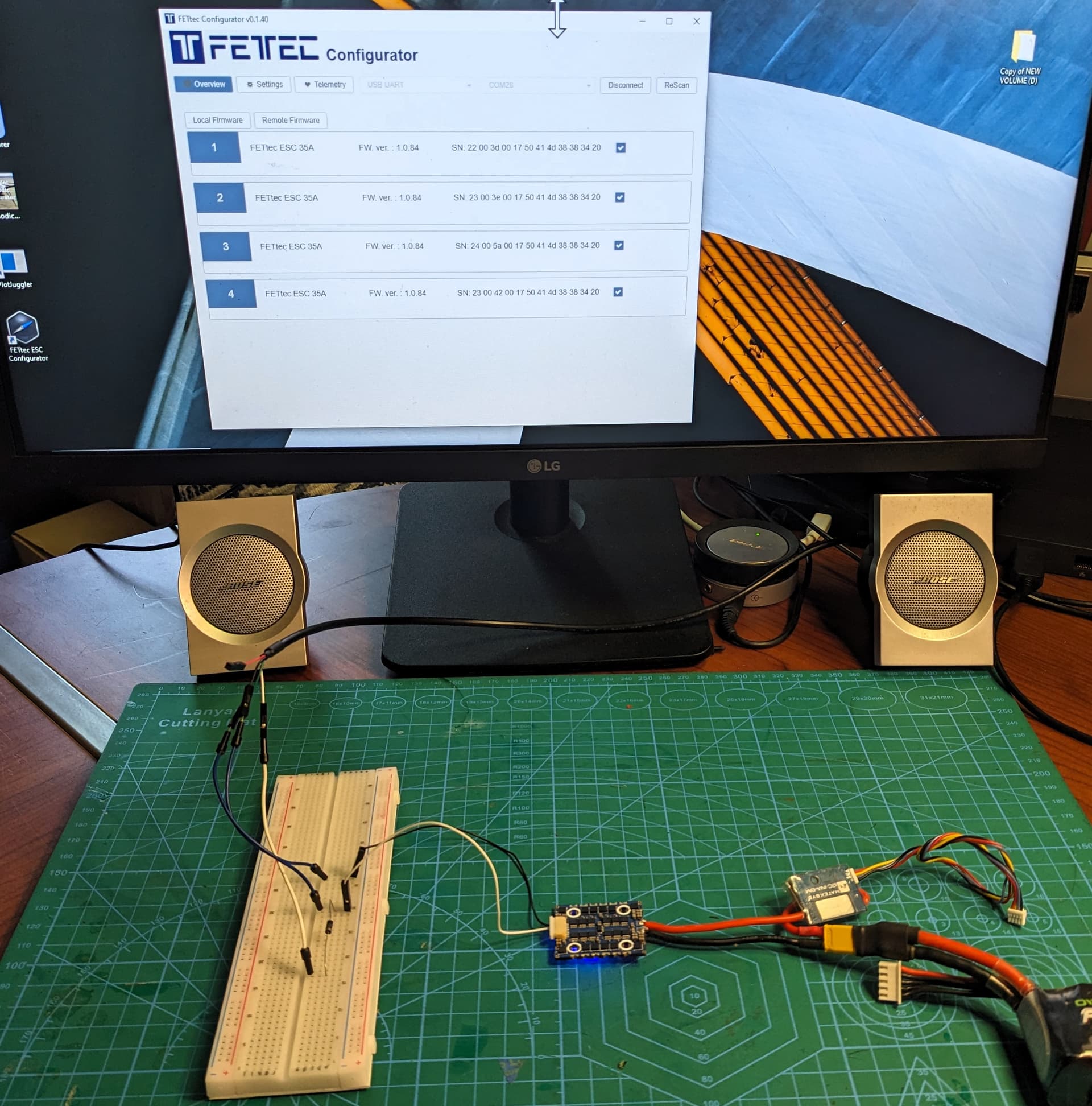
I’m working with a team that is sorting through getting a FETTec ESC 4-in-1 35A V1.1 to work. We’re using it with a Holybro Pixhawk 6C Mini.
We were hoping that it might just work right out of the box - but we’ve found that motors will “stutter” when starting about 20% of the time. We’ve tried multiple motors types and throttle percentages.
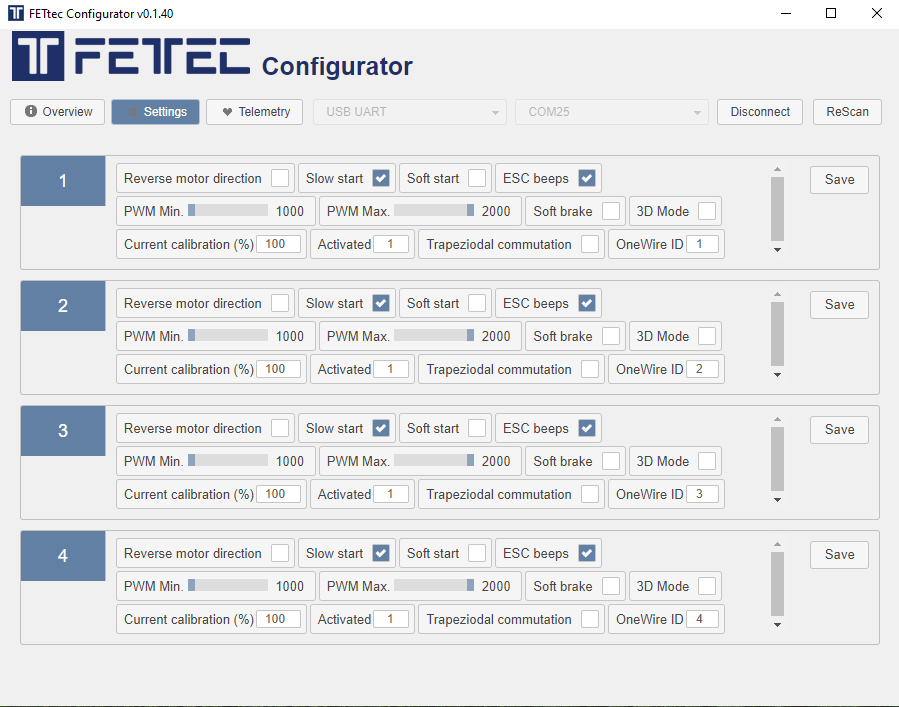
Our next step is to use the FETTec Configurator to see if an adjustment there might fix the problem. My closest experience has been with BLHeli_32 - using Sinusoidal and “By-RPM” output PWM frequency.
I don’t know what settings FETTec Configurator has available - but I have a hunch that it’s output PWM frequency might need to be changed.
I’ve studied the ArduPilot wiki on FETTec One-Wire ESCs:
https://ardupilot.org/copter/docs/common-fettec-onewire.html
As I understand it - FETTec OneWire ESCs have two different serial port usages:
- Telemetry input
- Pass-through for the FETTech configurator.
There is a paragraph at the end of the wiki stating that ArduPilot doesn’t support the serial port configuration necessary (2M baud and half-duplex) necessary for the FETTech configurator.

According to Mission Planner - these options are now available on 4.5.6

I don’t know if ArduPilot BLHeli pass-through is required - but I suspect not. Just to be sure, I’ve tried with both SERVO_BLH_AUTO both enabled and disabled. No difference.
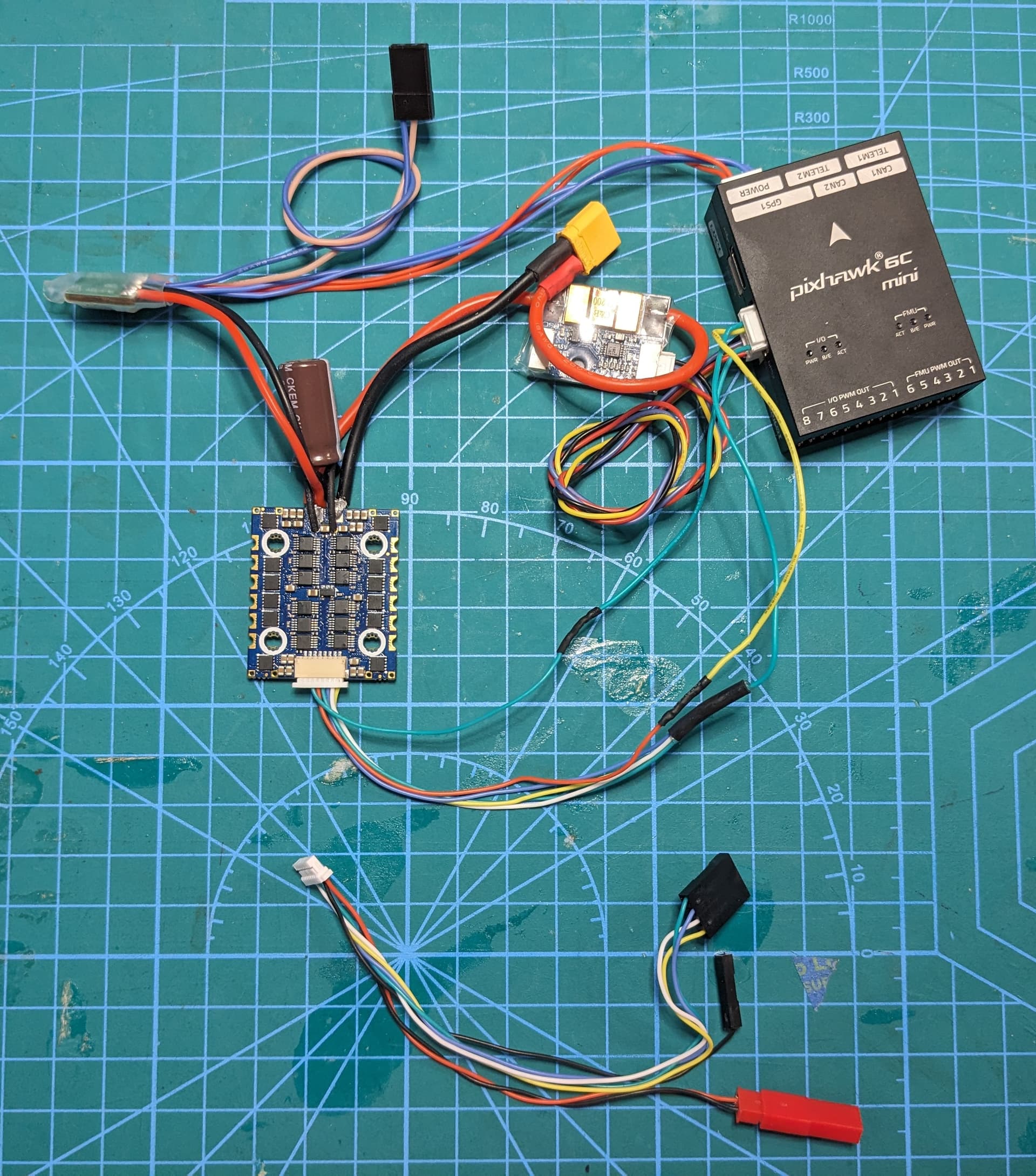
I’m using the GPS2 port (serial-4) because the ArduPilot wiki says it was tested and worked on an Orange Cube. The Holybro docs say the GPS2 port is UART8 - but I believe this is mapped to Serial4.

I’ve created a cable where the ESC 4 motor pins are all connected together and go to the GPS-2 TX (pin 2).
The cable also connects the ESC telemetry pin to the GPS-2 RX (pin 3).
I’ve included a wire that connects the ESC and Pixhawk ground pins.
Trying the FETTec Configurator, selecting the KISS passthrough option, I get this:
Trying the BetaFlight passthrough option, I get this:

So maybe using ArduPilot and/or a Pixhawk flight controller are still unsupported for the FETTec Configurator. I don’t know what else to try.
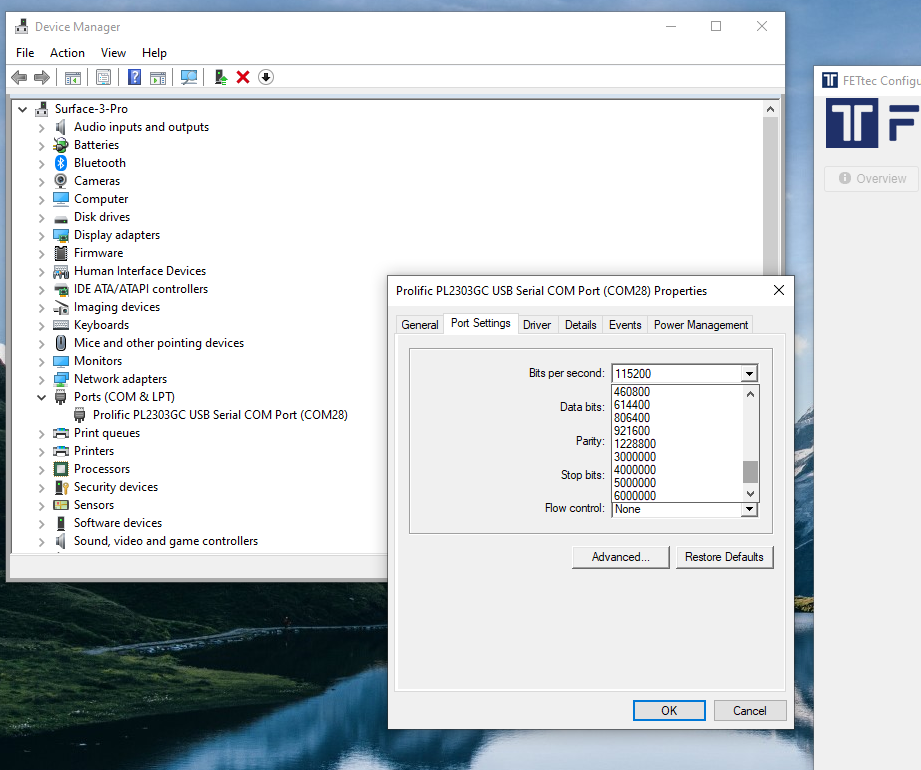
The ArduPilot wiki says using a USB-Serial adaptor is an option - and there’s an option for that on the FETTec Configurator. I can’t find any FETTech documentation on how to set this up properly - baud rate, options etc.
There are comments on threads about all this that mention using FTDI adaptors. I’ve read that a USB-Serial adaptor can be slightly different - so I’ve ordered a USB Serial port adaptor instead of trying the FTDI adaptors I have on hand.
I really don’t want to have to use a KISS or BetaFlight flight controller to get this FETTec ESC Configurator to work.
While BLHeli_32 is no longer supported, it supports “sinusoidal” - so FETTec doesn’t have that as an advantage. And the last version of the BLHeli_32 has a “by-rpm” setting for output PWM signaling - which is something that I don’t think FETTec supports.
If anyone has gotten the FETTec Configurator to work either with a USB-Serial adaptor - or an ArduPilot flight controller - I’d greatly appreciate some guidance.
Many Thanks!