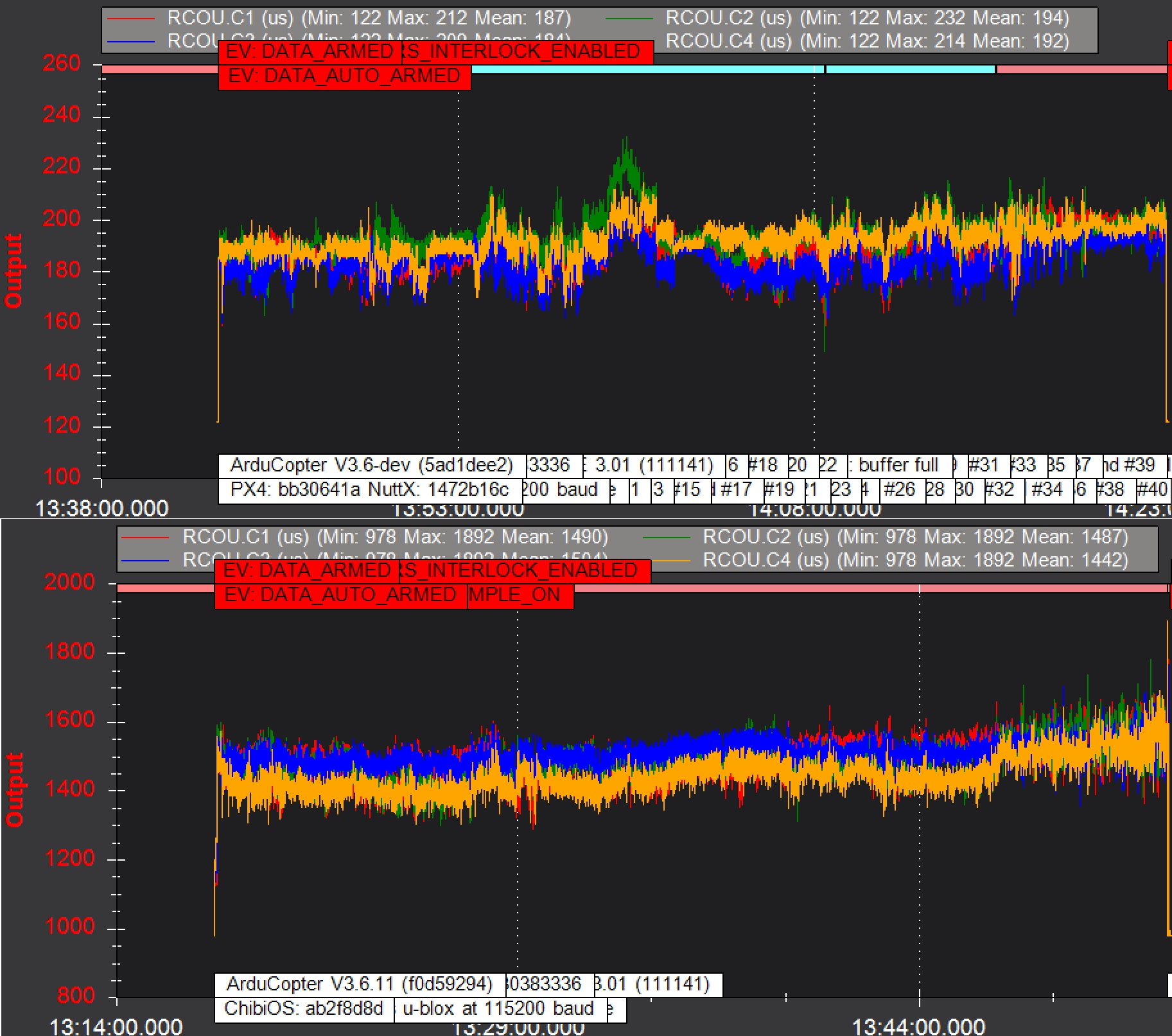
My quadcopter use same parts on frimware v3.6-Dev and v3.6.11,
but OneShot125 only work on old version v3.6-Dev.
I didn’t change any parameter except PID settings,and set MOT_PWM_TYPE=2.
Is this normal? Or what parameter settings need to be modified?
Any comments will be much appreciated.
Well this looks suspiciously like a factor of 8 difference which is responsible for a known bug in 3.6.x but fixed in 4.0. But I wonder if there is still some issue there …
Something fishy here. I see this issue on the Pixracer but on a Pixhawk 2.4.8 (same V4.0.0-rc1) on the bench the RCouts are in the proper range for Oneshot125. You just have to look at the MP status screen to see this.
BlHeli-32 reveal two problems: hardware engineering not ready for ESC telemetry, BlHeli passtrought, and / or software not able to handle the load.
IMHO hight rate dshot is not in line with arducopter medium to large working multicopters. We need a good support of low to medium KV motors (oneshot125 or dshot150) without need to reassign outputs in an exotic scheme.
Till next ?? generation hardware with full BLHeli-32 telemetry support is available, please, try to preserve or restore what was working.