Hi,
I got issue that let to a crash. As it seems in the log, motor 3 is shutting down. Is the problem caused because of the underpower situation or something else might make this? Something else- loose motor mount, motor/ ESC has aged etc…
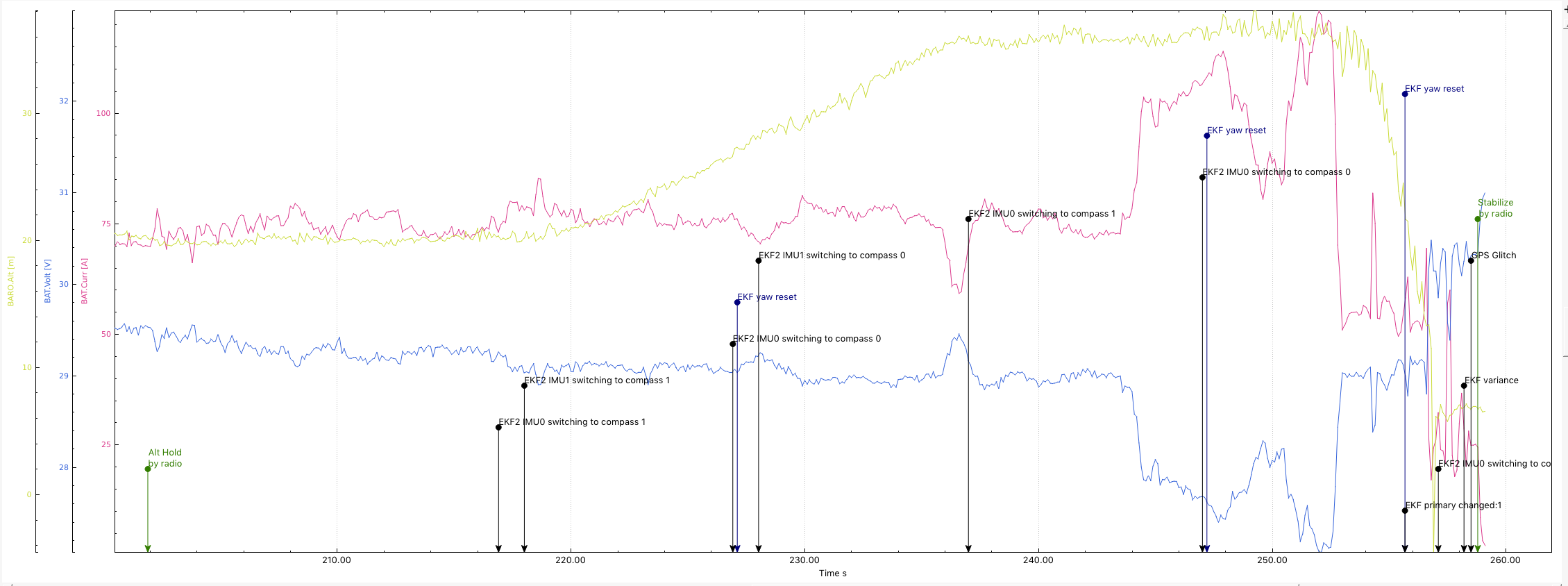
You reached altitude, and all was stable, very little increase in current until about 244s when there is a sudden increase in current and corresponding drop in voltage.
This coincides with the increased demand for power for motor 4.
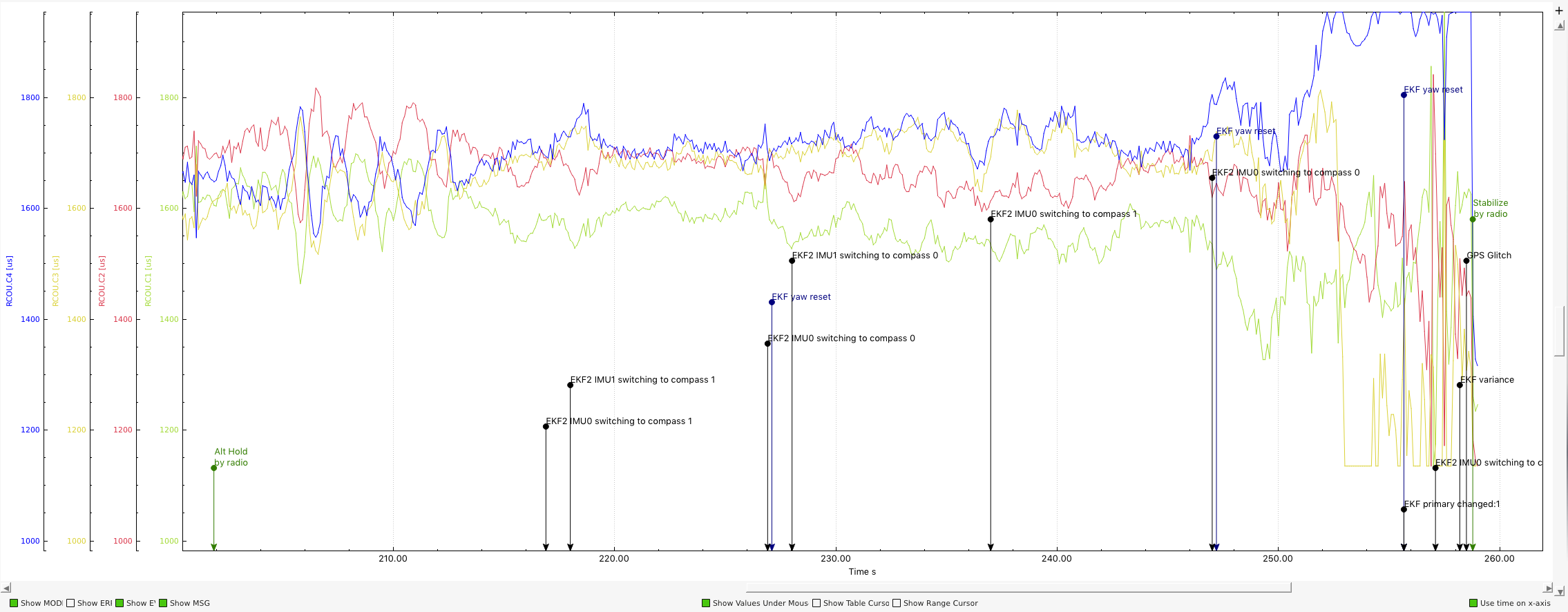
Your motors are working hard, 1600 to 1700 PWM, but are not maxing out.
Hi Mike thanks for the answer.
Why is that motor 4, could you help me to understand? As I see it, is motor 3 is shutting down and because of this motor 4 is trying to compensate it’s work. Because motor 4 is now spinning almost maximum, that causes the current spike.
The current spiked because ESC 4 or motor 4 died and drew lots of current. Actual thrust from motor 4 disappeared, the flight controller commands 4 to maximum and 3 to minimum to try and counteract the downwards tilt of arm 4.
3 and 4 are opposite each other.
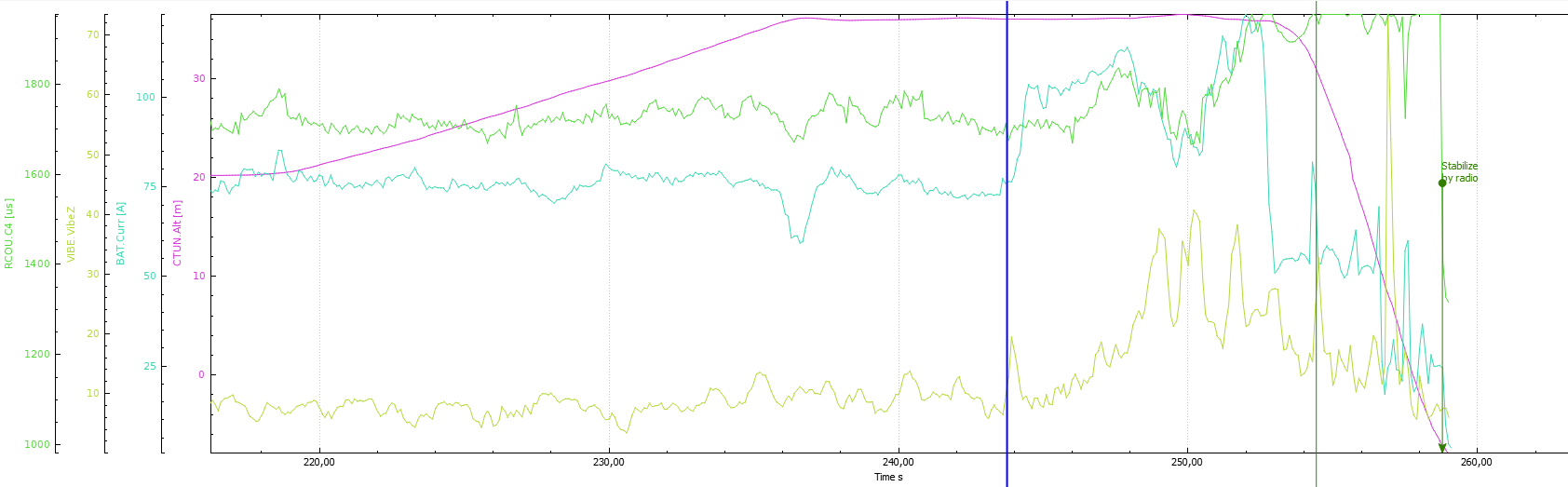
Looking at vibeZ, there seems to be increased vibration in Z axis just before the crash. I’d say it may be caused of the loose motor mounts(3D printed mounts) or disbalanced propeller. Any thoughts?
After the crash I checked the mounts, they were yeah moving a bit but not loose loose… The reason may be a little movement also? Or it’s more likely that the motor or ESC itself is past it’s time…? I have spare motor and ESC to try.
Wierd thing on test day, changed the motor 4 ESC, now the exact same thing happened, only with motors 1&2. Funny thing tho, the motor 4, which esc was replaced now works with much better pwm signal according to log graphs, Does the ESC-s lose their “power” with flights?
Also the log file is here, to analyse the problem:
Now Motor 2 appears to be losing thrust and Motor 1 dropping to compensate.
Understand that these outputs are not RPM or any indication of motor power it’s commanded output to the ESC. When a motor lose thrust for whatever reason (motor, ESC, prop) the flight controller will command the output higher trying to compensate. That’s how closed loop control works. If there is a loss of thrust on one motor then the opposite arm will have to be commanded lower to attempt to stabilize attitude.