This is just an aside for good build practice. It won’t make any difference now with this problem.
What same thing? We are just trying to confirm proper motor direction. You seemingly have the order correct.
This is just an aside for good build practice. It won’t make any difference now with this problem.
What same thing? We are just trying to confirm proper motor direction. You seemingly have the order correct.
Yes, the order is correct, as I mentioned before. The problem as you saw in the video is that motor 1 is not spinning. What I meant by “the same thing” is that after switching the connections from motor 1 to motor 4, now motor 4 is not spinning (the same thing happening as motor 1 before).
One thing at a time. Connect them back up as they should be and get the ones that do spin running in the proper direction. If you do that we can try another parameter setting to possible adress the one not spinning. Or the ESC is shot.
Okay, done. I switched them back and tested the direction once again at 1% in Motor Test to clearly see in which direction they are rotating.
OK and Motor 1 doesn’t spin even if set to 10%?
At 5% it doesn’t. Only twitches. At 10% it twitches once and then spins, but if I try to test it again the second time it doesn’t spin. So, it’s like random. If I help it by rotating the motor a bit, then it begins to rotate by itself.
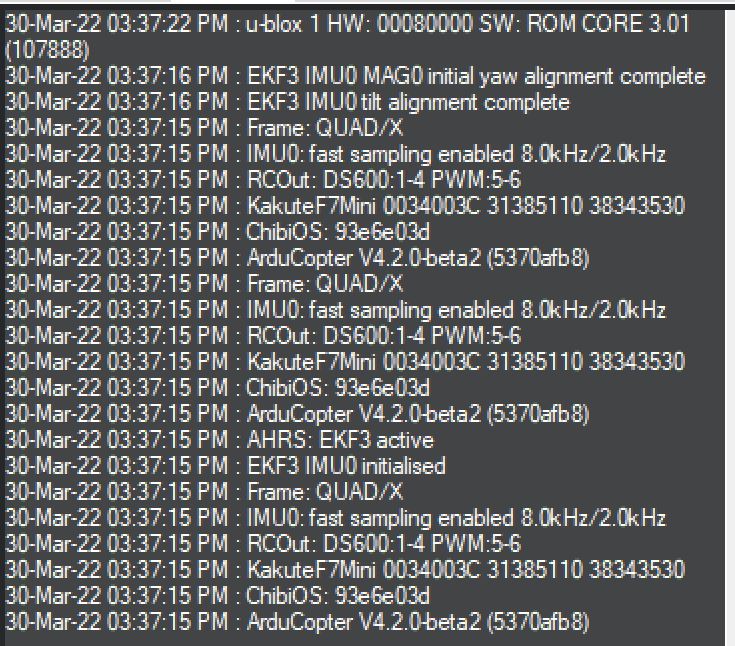
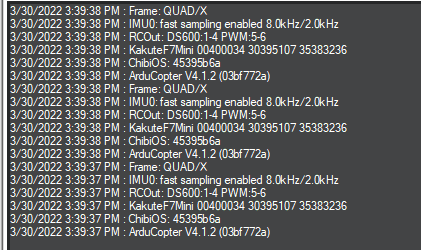
After connecting to Misison Planner post a screen shot like this of the messages screen after a few lines load:
Do you want me to arm it and then posted a screenshot after a few lines?
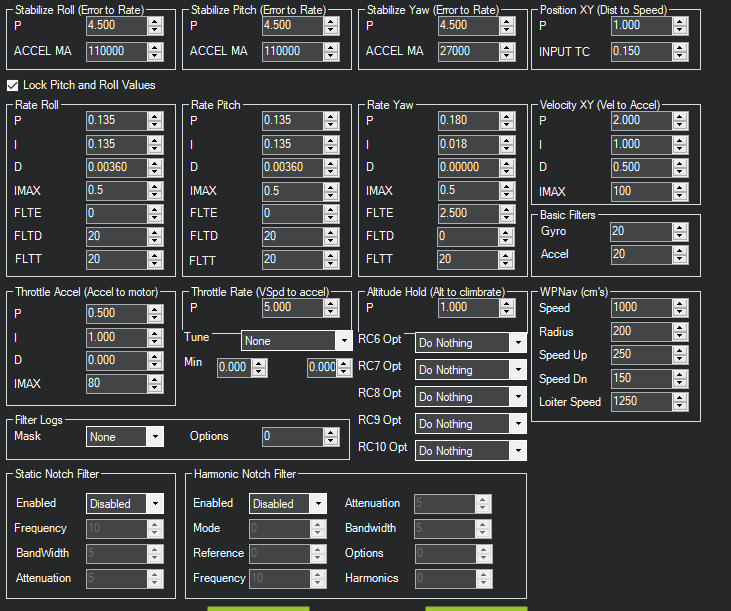
No, this is good. Just wanted make sure RCouts were Dhsot600 for 1-4 and they are. There isn’t much else to try.
Try setting SERVO_DSHOT_RATE to 1, cycle the power and try it. Then 2, cycle the power, etc. up to 3.
It’s the Tekko32 ESC right?
Yes, it’s a Tekko32
Looking at the screenshot you posted, for me in messages there is nothing that says EKF3 tilt alignment complete (after I armed it). Only alignment complete.
That doesn’t matter. If it doesn’t run in Motor Test it’s a fundamental problem. It bypasses all the loop control stuff.
Yes. It does work in Motor Test and even when I arm it.
After arming it now, I just started to notice that when I have the throttle somewhere at 15% I can see that Motor 1 seems to be spinning slower than the others.
I was checking this and at 15% throttle apparently, Radio 4 is slowing down when they all are supposed to stay at the same spinning rate. Even Radio 2 is increasing without me moving the throttle.
As I said before if you are testing this on the bench with the Transmitter it’s meaningless. If you have done all the mandatory calibrations and Intial Tune parameters (broken record here) put props on it and make a take-off attempt.
I have attempted to make it take off. It won’t lift up even at 75% throttle.
It can only lift up from the right if I go almost full throttle.
Okay, after doing a second flight test It is almost working. I could get it to lift up a couple of inches without tilting. However, it’s moving to the right by itself.
https://drive.google.com/file/d/1-yDU0N8-sFlMWjSEYt-ZlrTdBucoBV8S/view?usp=sharing
Here you can see at had the throttle to mid-level and it wasn’t lifting until I began pushing it a bit more you can see the drone lifting just a bit but moving to the right.
The video is not worth as much as a Flight log.
So you are approaching mid-throttle and it’s lifting off. Take it outside and fly it. If you have done a proper accelerometer calibration and there isn’t much wind you shouldn’t need much pitch/roll stick to hover. But in Stabilize it won’t hold position.
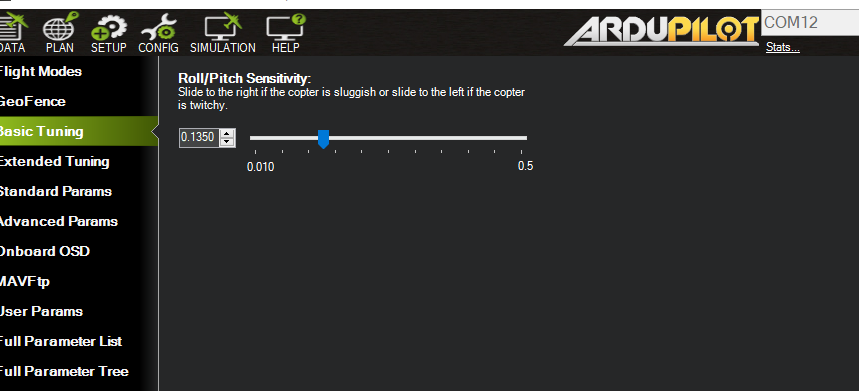
But you still have not done basic tuning for pre-maiden flight (all at default) so I don’t think I can help you any further.