I don’t have the old parameter list. It is my first configuration and I try to reproduce the parameters of @THKoelnMech manually. The names are less of a problem since I can guess them. The real problem is the values. It looks like the allowed ranges were changed, so how should I convert the values by hand?
Furthermore I actually used the version that @THKoelnMech was using, so I don’t understand where this discrepancy (in both names and values) comes from?
I managed to advance somewhat. However once I try to get into air - the drone tilts forward crashing. I’m not sure what is wrong. So may I have your full parameters file anyway, please?
Motor order and rotation is the usual reason.
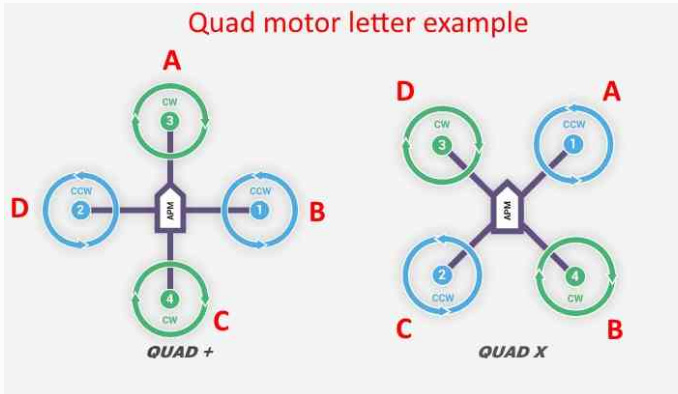
You need to check the motors with MissionPlanner motor test - and keep in mind the MissionPlanner “A,B,C,D” order is different to the Arducopter servo output numbering of motors “1,2,3,4”
I’m not sure what Matek F405 board you have, but in general they will all work with your VTX. You won’t have Betaflight style control of the VTX but you will have OSD if you wire it as per the manufacture’s instructions.
I use FatShark Transformer goggles. They’re probably the last box goggles Fatshark made. Certainly not what all the cool kids are using. But they have a great image, and because I have a stereoscopic vision problem the single panel video works better for me. Watch Josh Bardwell or UAV Futures on Youtube for some reviews of different brands and styles of goggles. If the budget is tight you don’t need to fork out for HDOs with the latest module. There’s lots of good ones out there.
@Allister - thank you for your reply. What I have is Eachine’s clone of Matek F405. I use matekf405 or matekf405std ardupilot firmware. You can see the flight controller, the camera and how they are wired in this part of Joshua Bardwell’s video.
I don’t have goggles yet. At this stage I just want to figure out how to make the camera to dump videos on the memory card (blackbox that holds logs). How can I achieve this with ardupilot? Do I have to send certain commands via transmitter to the flight controller to activate/disactivate the camera? Or should it work on its own just as I start flying?.. so far I didn’t see any videos appearing in the blackbox (I was flying with the camera lid closed, maybe it is the reason that it didn’t capture any videos?..)
The camera is just an fpv camera. It doesn’t store any video. The video is just send by the VTX. The OSD on the matek f405 works as described above or in the docs. Thus, you can see gps coordinates, battery voltage, speed, etc in the video stream.
The sd card just stores the arducopter logs.
The VTX has no working smart audio to change vtx channel or transmit power.
In you want to record videos with the drone you must add a gopro or replace the camera by a foxeer mix or runcam split.
Not possible. You would either need a camera like the Caddx Turtle that has it’s own DVR, or goPro. The SD card on the flight controller is only for the flight logs and terrain data. The F405 would not have the processing power to store video files and fly the drone at the same time.
Thank you very much! I’m not that good at hardware/electronics and just starting with drones. Your help is difficult to underestimate!
Another question: I would like to attach a relay to the copter and be able to turn it on and off via radio transmitter. To this end I need to get one HIGH/LOW signal from the F405 flight controller somehow. Is it possible?
@THKoelnMech - thank you again! Can I achieve this by adding some extra hardware? For example this (6 PWM channels) or this reciever? Or do I have to get a new flight controller? What not expensive flight controller can you recommend that supports attaching of a relay?
I just want to be able to turn on/off any attached electronic devices (e.g. led lights, sprayer, etc…) via the relay. I thought FrSky R9 SX with 6 PWM Servo Connectors can be used?..
Did you get telemetry working? I’m specifically interested in getting the batery voltage on my openTX Jumper T18 transmitter. For now I use the same receiver/wiring as Joshua Bardwell in his videos and it works with Betaflight… how can I get it working with Ardupilot?
could you, please, post a link on such a PWM switch so I can get a clue of how it looks like?
can I solve the problem by buying one of this receivers to work with my Jumper T18? (they seem to have some extra pins on them, so maybe they can be used to send the HIGH/LOW signal to relay?):
I got telemetry working via frsky receiver. It is described here in arducopter documentation. However, it is simpler to use the OSD for things like that. Maybe you can use an fpv monitor mounted to the remote.
1st you need a receiver that supports ACCST protocol to be compatible with the T18. I already said the R9 SX is not. Then you want both Sbus (for the flight controller) and some additional standard PWM outputs for your switch. For the Frsky Rx’s that interest you go to the Frsky product page download section anfd see if there is a ACCST target. If so it’s compatible with your T18.
Or you could buy a new Flight Controller that has additional outputs that can be configured for Relay outs. Then you only need Sbus out of the Rx.