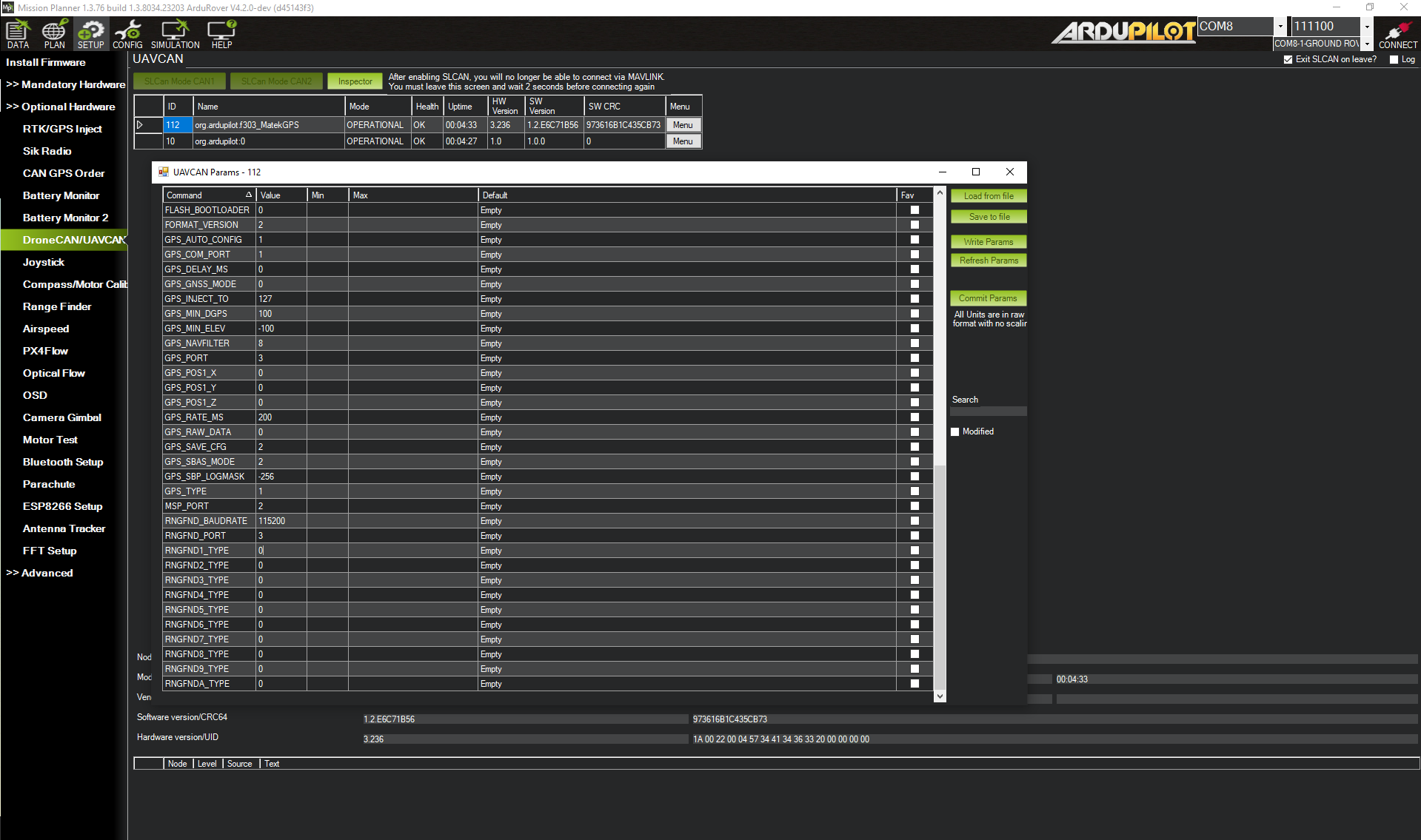
First tests if CANBUS looks promising, i would have liked a few more options on the m8q-can firmware but it fine as a test device to see what ap_periph can do
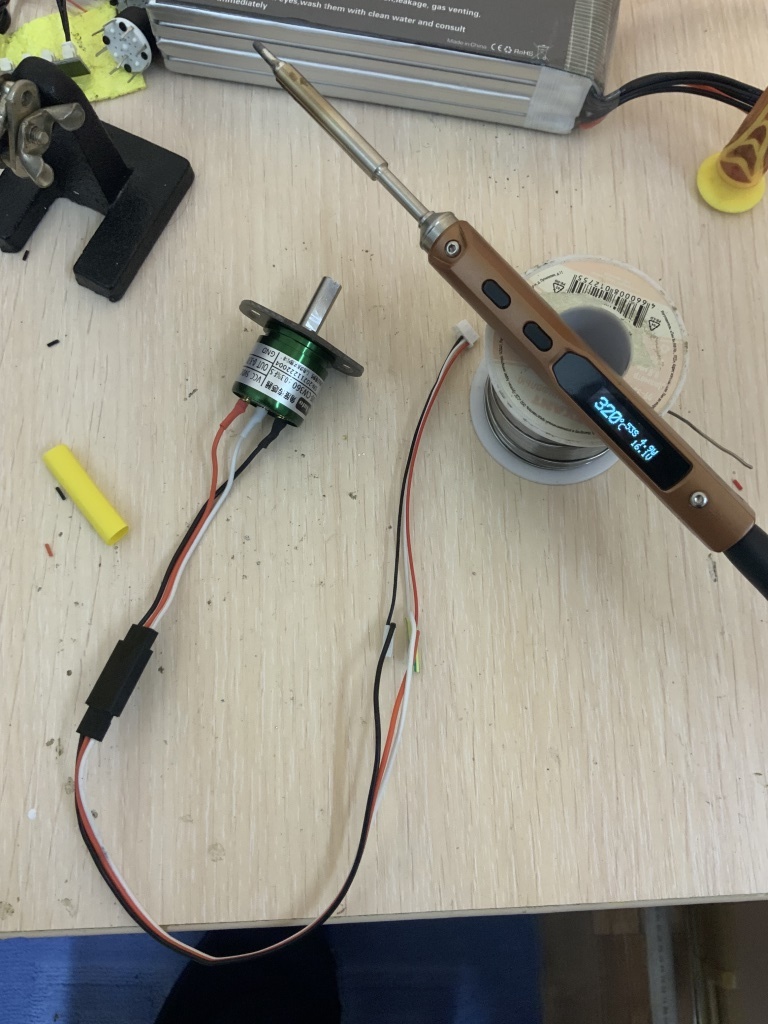
I used one on hall sensors. He showed himself very well.
1 Like
My sensor is a hall sensor, but the grease in it was quite thick so it was resisting rotation.
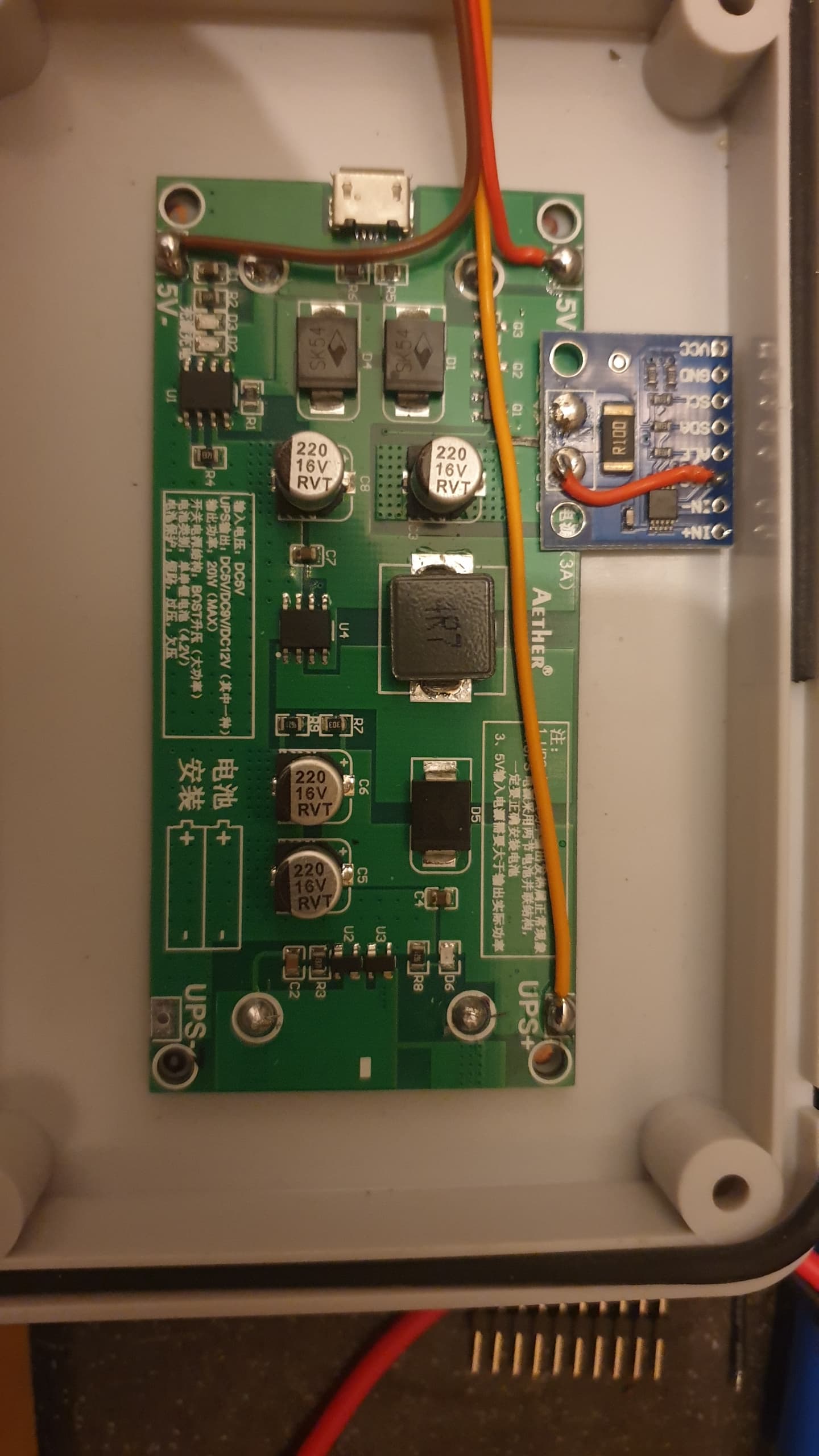
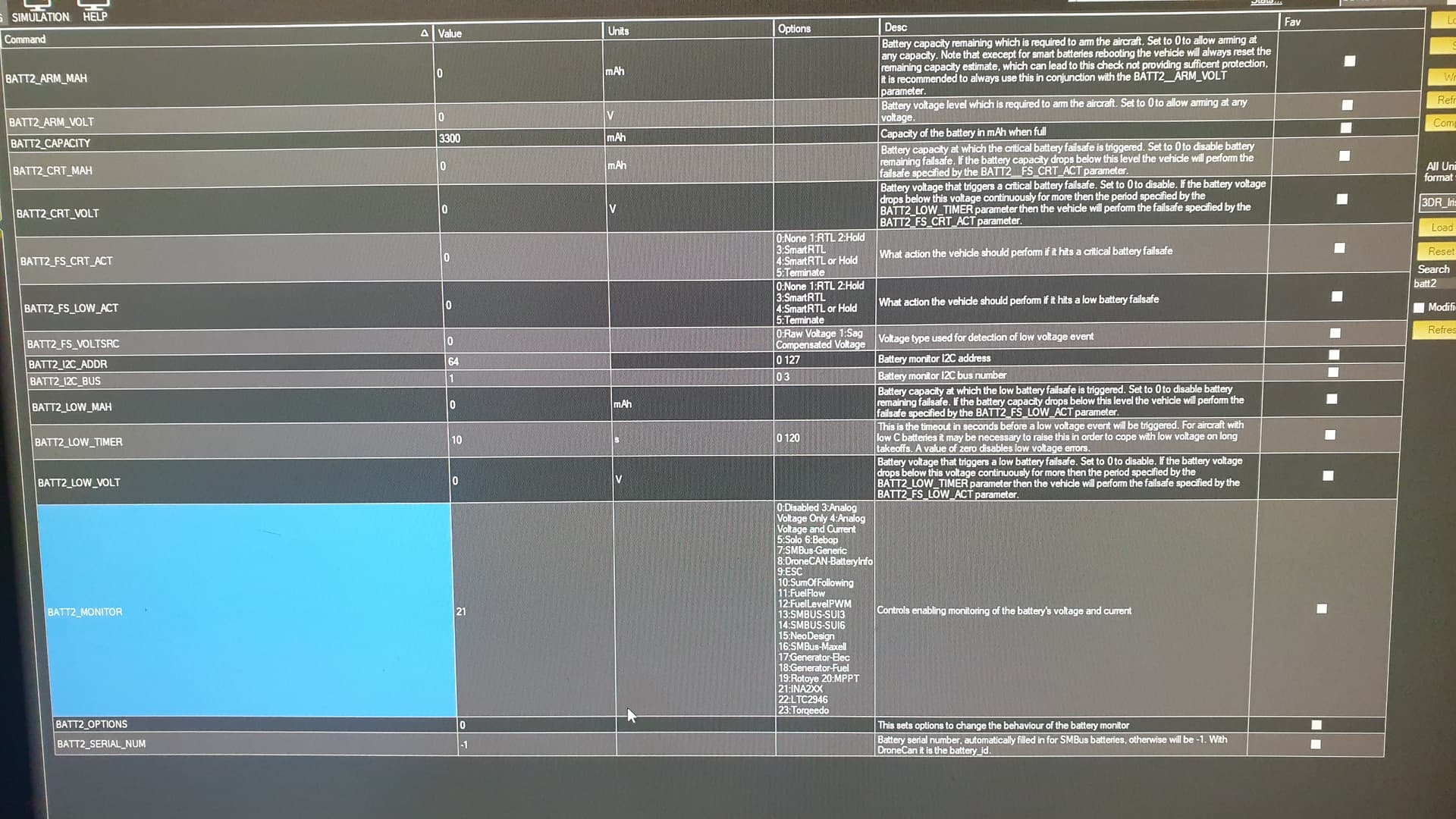
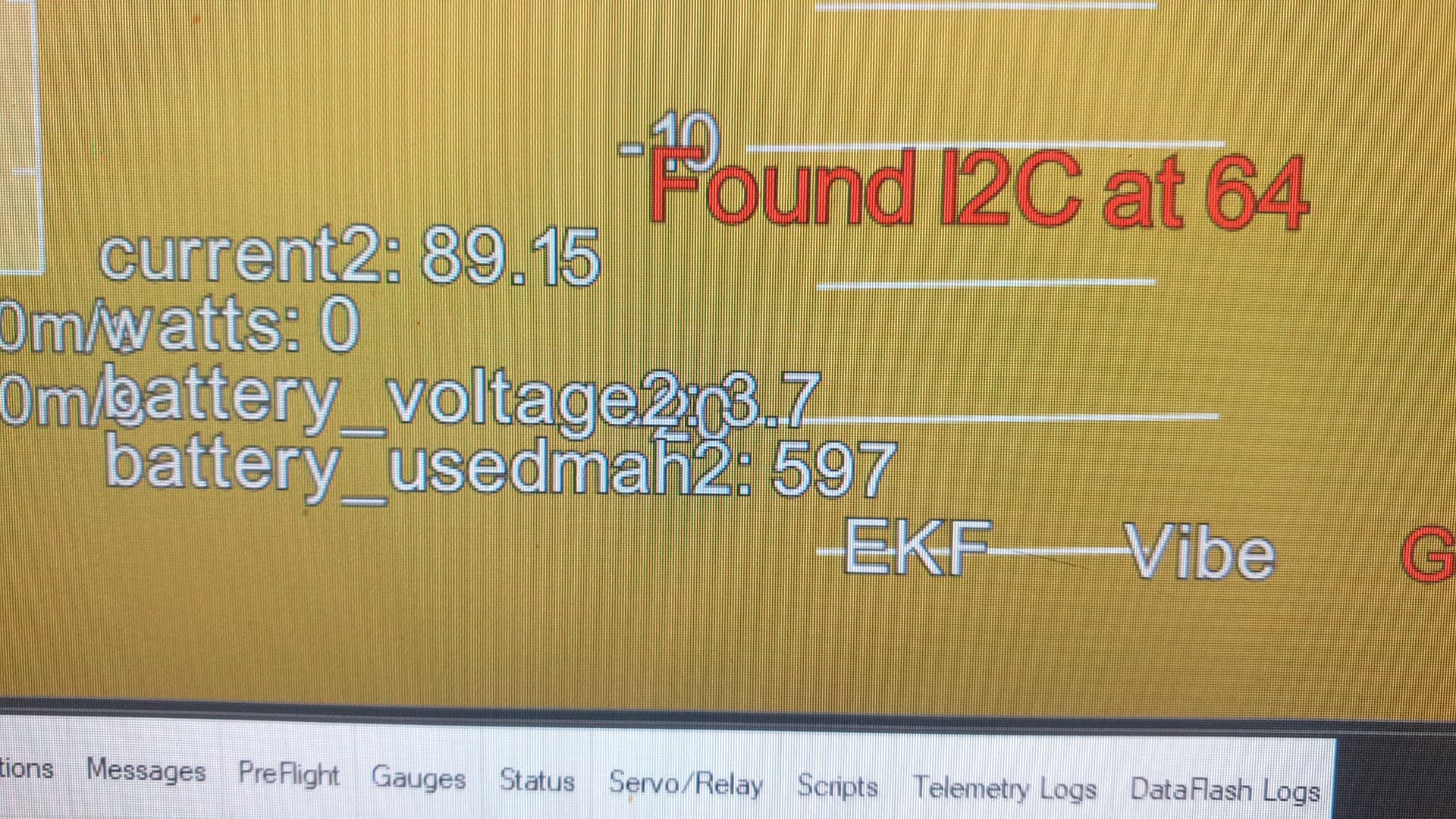
I have added i2c INA battery monitors to the 18650 backup batteries, one pair runs the servos and pixhawk via the servo rail, The other pair of batteries powers the s4 phone and the pixhawk via the USB 5v rail, so whatever happens the pixhawk it should be the last thing alive.
I am waiting for another 12v UPS for the Bilge pump, it occurred to me if water got in and took main power offline then the pump is the first thing to stop.
Good job, maybe a bit off-topic but I had the luck to test a leddar based teraranger tower and it allowed for nice obstacle detection in 8 quadrants with +/- 50 meters range and being solid state and certainly waterproofable.
The code for obstacle avoidance exists to my knowledge however didn’t test it yet, almost sure it works good with rover firmware va I2C.
Cheers
1 Like
I had a look at that sensor. Its essentially 8 directional rangefinders with a controller. Its similar to @ppoirier s POC where he took 8 lidars and connected them in a similar way.
I am planning on something similar just connected differently. So rather than having an arduino controller manage all 8 2m VL53L0X or 12m TF-mini lidars and send that as proximity information to the flight controller via mavlink I am just going to use an arduino to set the addresses on some 4m VL53L1X and let the flight controller manage the sensors directly. they will point every orientation apart from straight ahead where I will have a TF mini for some additional range. so in total I will have 4m lidar in every direction with 12m ahead and 20m rotating radar.
For long range detection that’s what the scanning radar is for. It can scan each orientation giving early warning but less accurate range and direction on obsticals allowing path planning much sooner.
1 Like
First test of the first pair of retractable solar panels.

1 Like
second test after some adjustments

1 Like
Cool thing with solar panels! It is possible to make a tracking mode in general so that the panels are always directed to the sun.
1 Like
I had ideas for tilting the panels up so they could track the sun during the day and act as sails at night. but the sail was a more reliable option.
the plan for retracting the solar panels is that they will retract if the wind gets too high, the boat tilts over too far or its too dark to make any power.
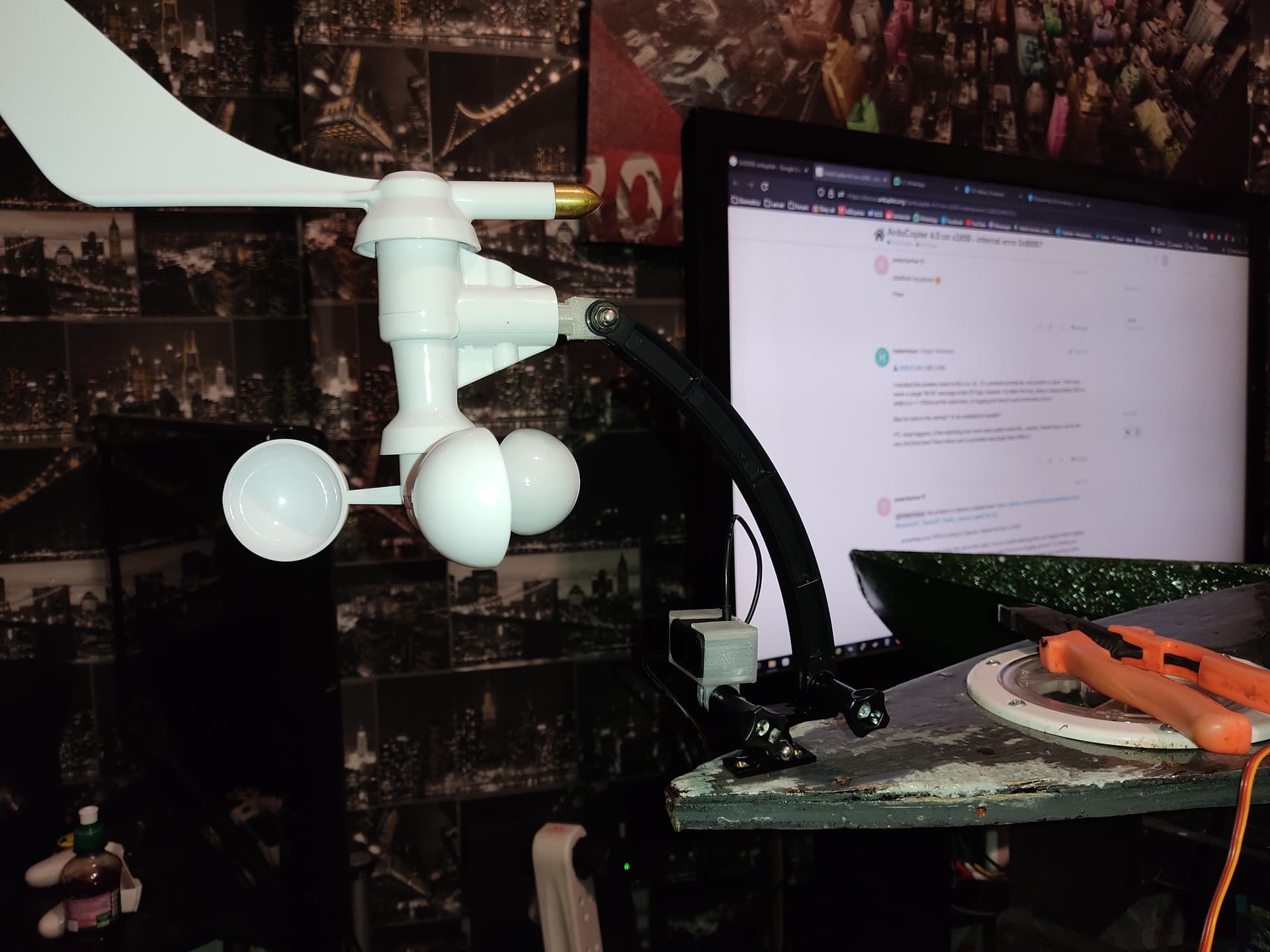
Got my tfmini plus rangefinder for the front of my boat.
I 3d printed a GoPro adapter and used a dual camera mount to mount the lidar under the wind sensors.
to change the sensor to i2c mode i used this arduino sketch.

1 Like
Bluetooth BMS arrived, this combined with the active balancing should let me get every drop of power out of all the cells safely.

I just got a pair of UHF boosters. This will amplify the openlrs up to between 1.5 and 2.4w depending on how much voltage is applied.
I probably won’t be installing them yet the stock radios are fine for now.

Added 2 more solar panels, its retracting but its a little rough, i need to tweak the solar panels a little to get them to move smoother.

2 Likes
Today I tested JSN-SR20-Y1, adequate readings start from 20 centimeters.
Maybe I’ll test it in the pond, I want to compare it with normal sonar.
Is the RNGFND_SPD_SL parameter available in the latest stable versions?
I 'm still in the old version since February .(4.2 dev)
1 Like
Unfortunately its not, I will hve to convert it back to analogue of I want to use the latest firmware.
You will need to ask to be added in the future. Have you used via i2c?
I dont think there is a i2c driver for it. I had a go at hacking a uart driver but i couldnt get firmware compiled its beyond my coding abilities.
Have you managed to connect BMS to Ardupilot?