I have started building a solar/sail boat to loiter in a pond as a test bed for long range 4g and lora setups, I have a classic yacht hull and the plan is to fit a small sail, twin propellers and a small air motor as a backup in case things get snagged,
the other option i had for a backup motor instead of the air propeller was a small washer pump from a car used as a jwater jet drive, I used to do this on 2 stroke rc boats in case they cut out on the pond, the boat could still propel its self back to shore using the pump jet and with the small inlet and no external propellers there was very no performance loss other than the pump weight. so i went looking to see what pumps were out there since its been 10 years since I last used 2 stroke engines and to my surprise most car manufacturers have moved to a dual action water pump so it comes out one of 2 nozzles depending on what way you spin the pump sending water to the front or back window.
then i realized this can be used as a cheap bidirectional manoeuvring thruster. so rather than just using it for auxiliary forward propulsion it could be used as a very cheap lateral thruster so im going to add a pair as bow and stern thrusters.
my plan is to shamelessly copy this setup for the wind sensor and sail design, i have plenty of old glider wings i can use and since its only going to be loitering it doesn’t have to be very big, i think this boat looks amazing, its very clean, no rigging and the sensors are relatively cheap so im using it as a starting point.
i went looking to see if anyone has done anything like this before and all i could find is this full sized version.
so now its going to have bow and stern thrusters with a propeller left and right, it would technically be an omni boat and this brings me to the question of does arduboat in omni boat mode count the lateral motors as rudders or motors when sailing? will it try and use the motors to turn in a sailing mode like they are rudders or will it just use the rudder on its own keep the thrusters off off like normal motors until it misses a tack.
I know lateral control is still not supported but will it use the lateral thrusters it for yaw with the boat in sailing mode? i would think that they should be treated as motors so they should be inactive unless propulsion is enabled, but i cant find anyone that has even spoke about using both omni boat with sails.
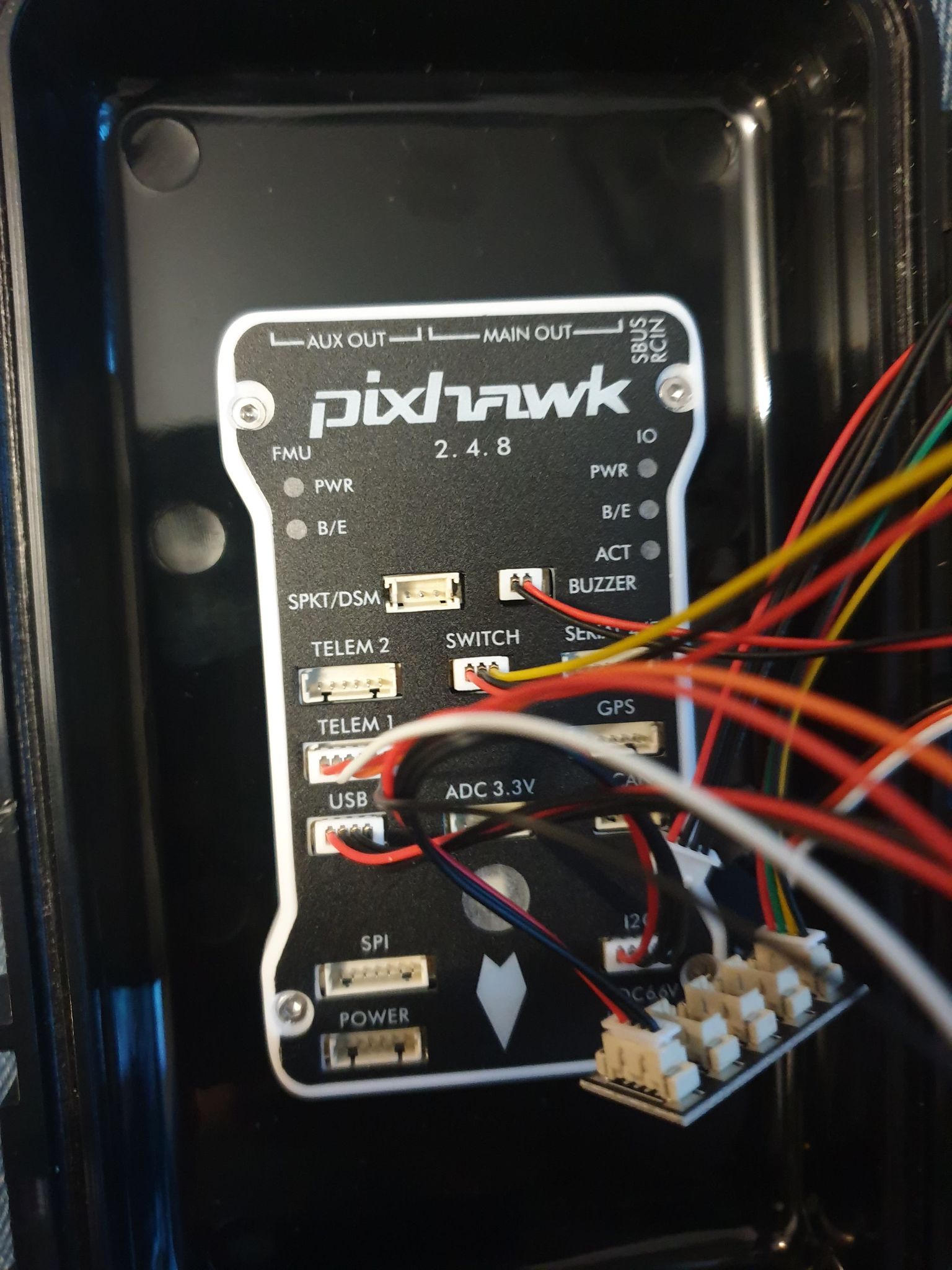
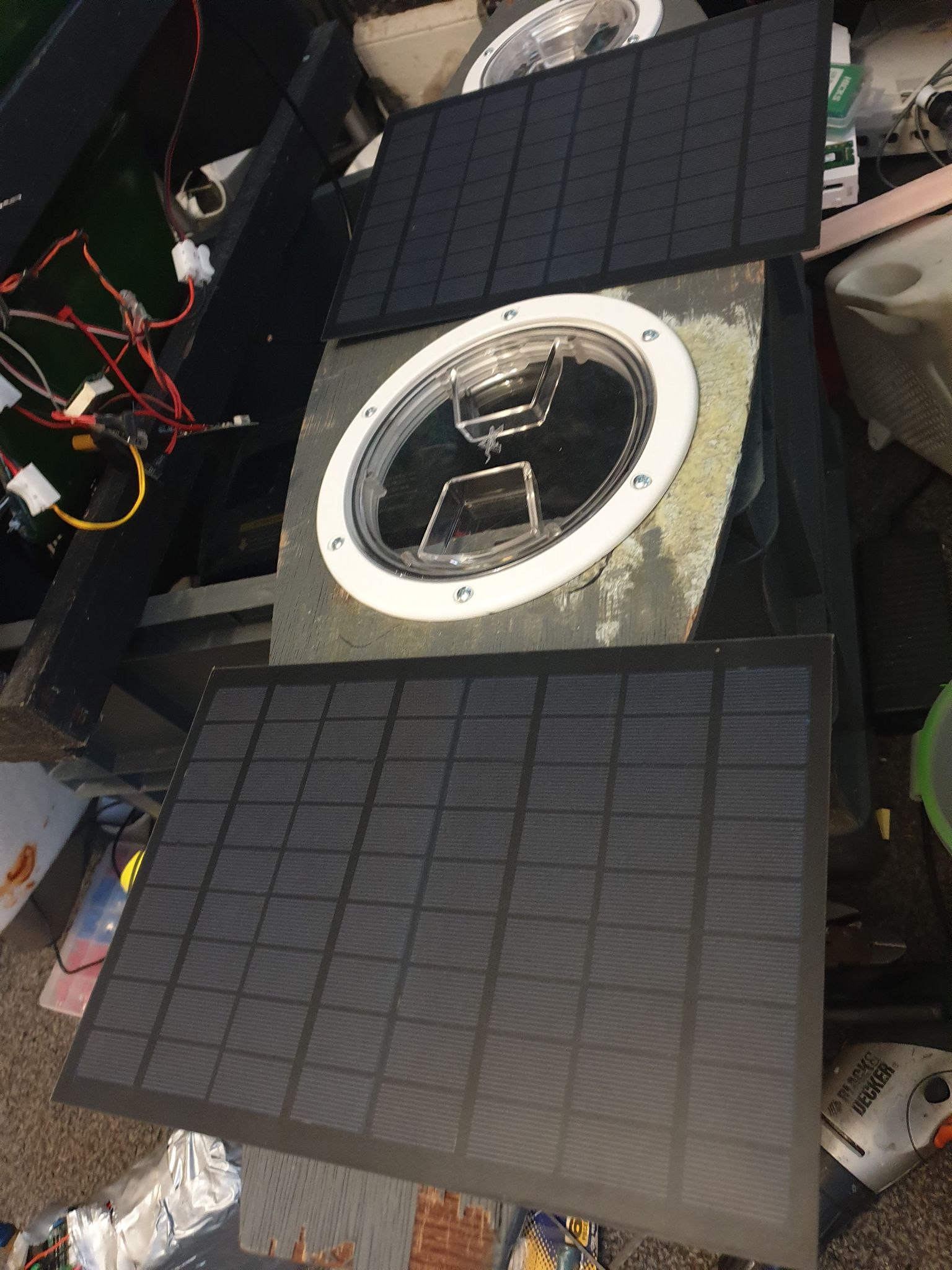
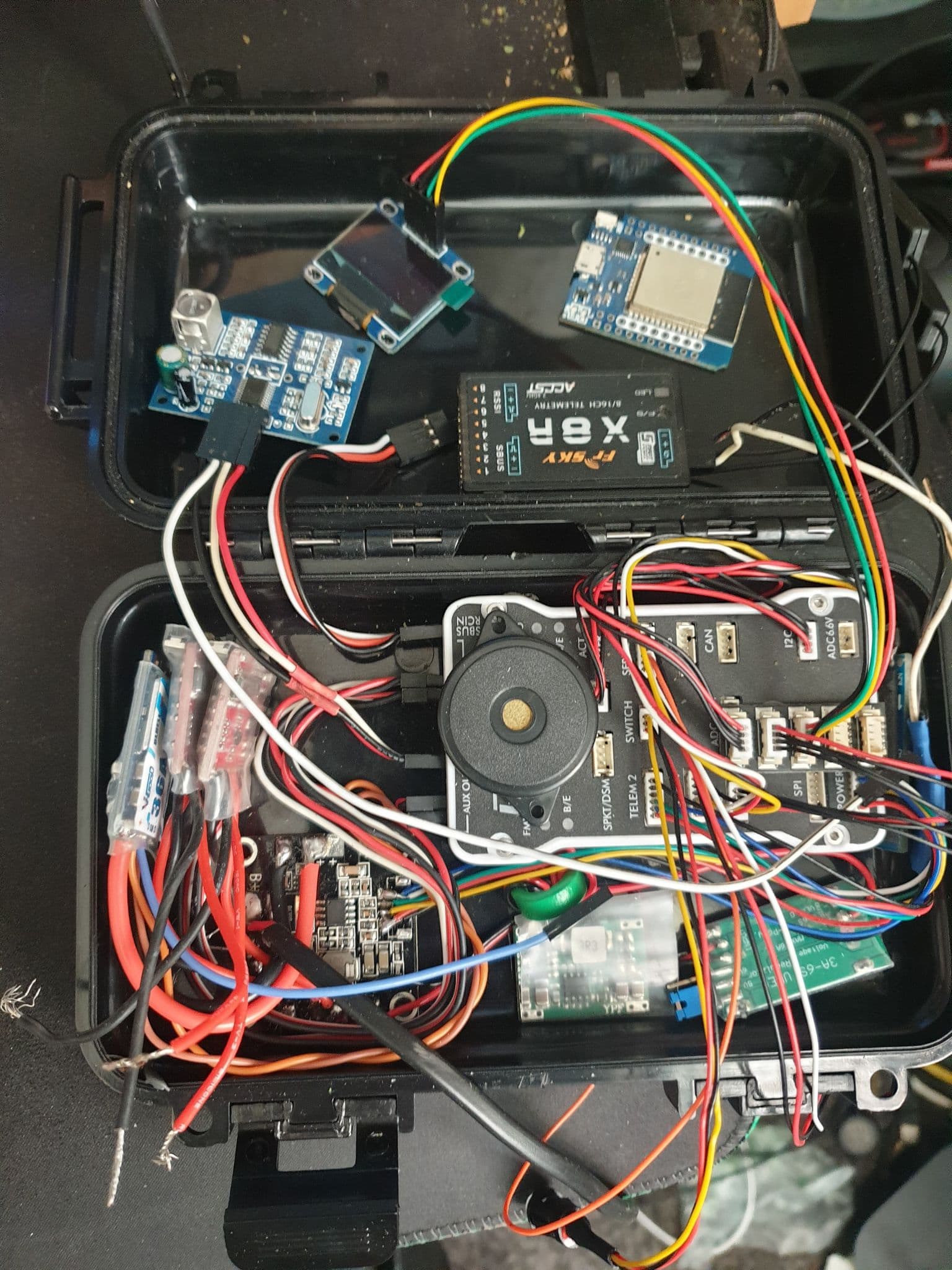
pumps have arrived and have been dry fitted for now untill my new motors arrive then i can get the hull finished. pixhawk, PDB, solar panels, mppt controller, servos and sonar are currently en route from china so i should be able to start wiring things up once the main shafts and motor mounts are done.
the pulleys for rotating the mast have arrived and also the deck hatches but i need to repair the deck before it can be cut out or it will just turn to splinters.
first test in the bath, it basically works but I am going to have to set a high deadzone so there is enough thrust to push the valve over when the motor spins up. there are 3 or 4 other washer pumps that i could fit with no modifications with different valves so i might buy a few for testing to see what ones work best at lower thrust levels.
all the motors are in and I have started doing some testing with the pumps, one issue I have found is they need some amount of back pressure to keep the valve open or it starts to rapidly open and close, simple solution is choke the outlets to give more of a jet of water and set a large dead band so it doesn’t throttle down too much.
Latest test of the bow thruster using a brushed speed controller, even with just the bow thruster it has a lot of authority. I think most of the issues I was having before was just the boat sitting too high in the water and air getting in the pump.
@rmackay9 is there any reason not to use a motor setup of motor 1 motor 3 for side thrusters and left and right motors instead of setting them as motor 2 and 4? As far as I can tell the only difference is it will use the main motors for yaw when set to left and right motors instead of just using the lateral thrusters for yaw.
when i try this setup i get this error on arming:
PreArm: regular AND skid steering configured
the more i think about it, if its not using motors 2 and 4 for yaw then why does it need 2 propulsion motors in + configuration if both motors are just doing the same thing?.
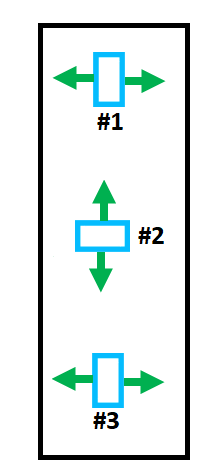
would this be a viable setup for a 3 way omni? it would just a 4 way with one less motor and would be more like a normal boat setup with dual thrusters.
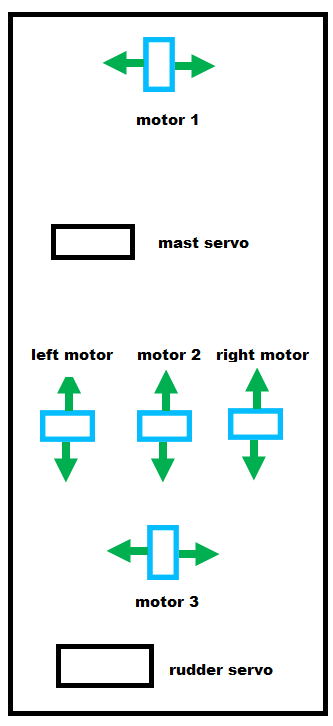
this is what the final setup should be, motor 1,2,3 are going to be bidirectional water pumps, allowing it to hold position without the propellers if need be. then the propellers will be setup as left and right motors for yaw control along with the rudder plus a servo to rotate the mast.
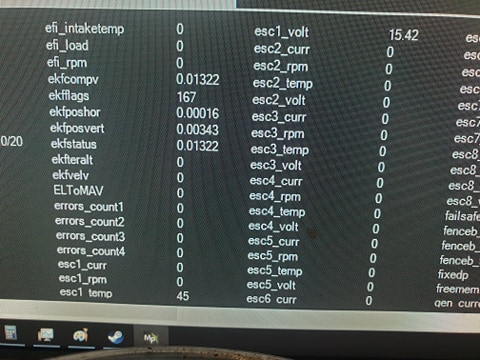
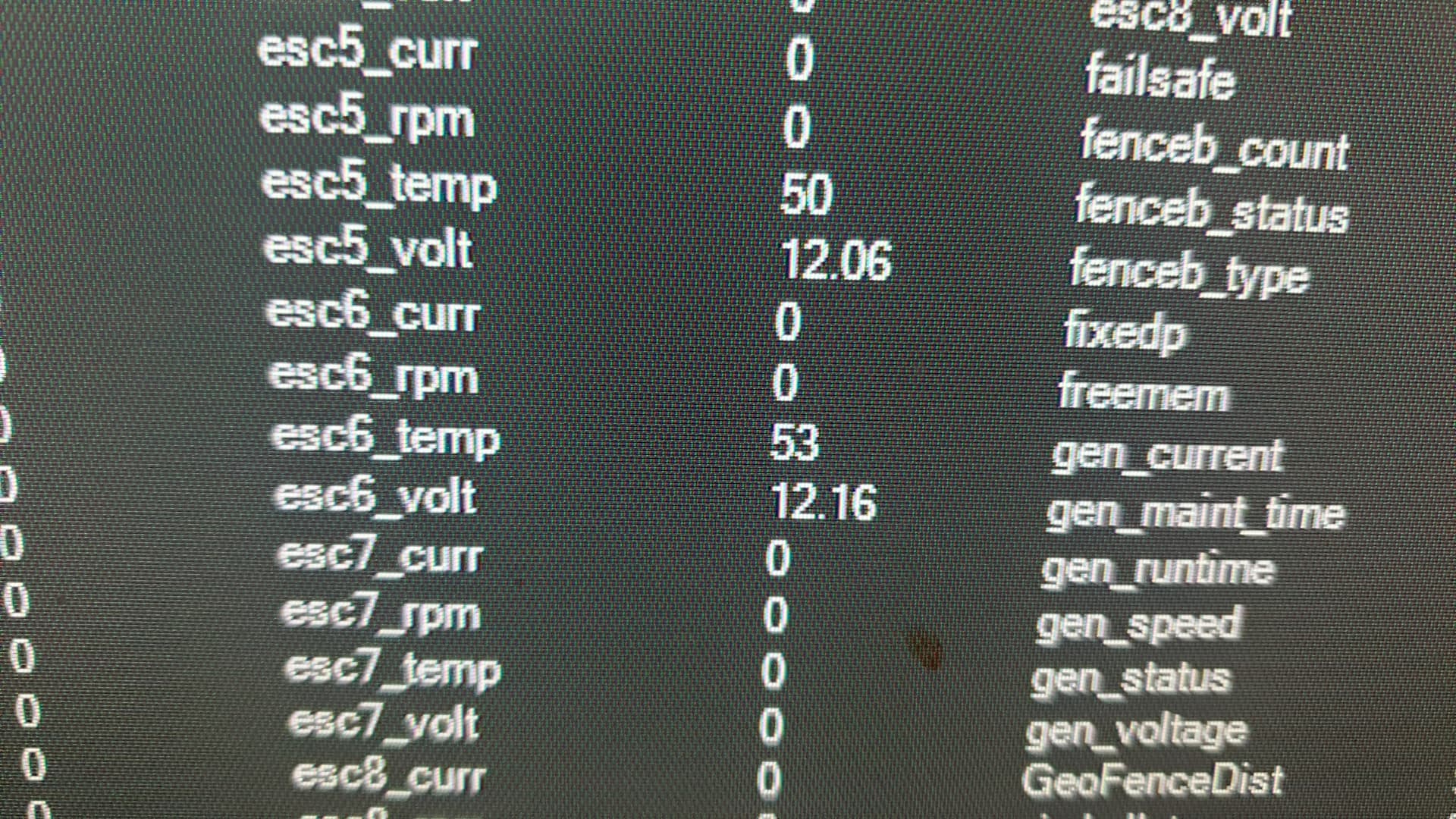
Good news is that Blheli works great with rover firmware as far as I can tell, both main motors are running D-shot 150 and have blheli telemetry working on them and I can configure them via the pixhawk via blheli32 application. the idea is that if seaweed or something wraps around the propeller I will know about it. These controllers also have a programmable voltage and current limit so it will limit power to the motors without my intervention and they will shut off long before the BMS in a low voltage situation. the only thing I had to change was moving the 2 motors to channels 9 and 10 on the aux pins as the main motor pins are not compatible on a pixhawk 1.
I installed the brass outlet for the forward and reverse water jet pump on the front of the keel to go with the outlet on the stern infront of the rudder. This now means In can be a full omni boat on pumps alone
bilge pimp fitted along with an intake filter to stop debris fouling the pump. The white wire is a pair of stainless steel probes for detecting water in the bilge.
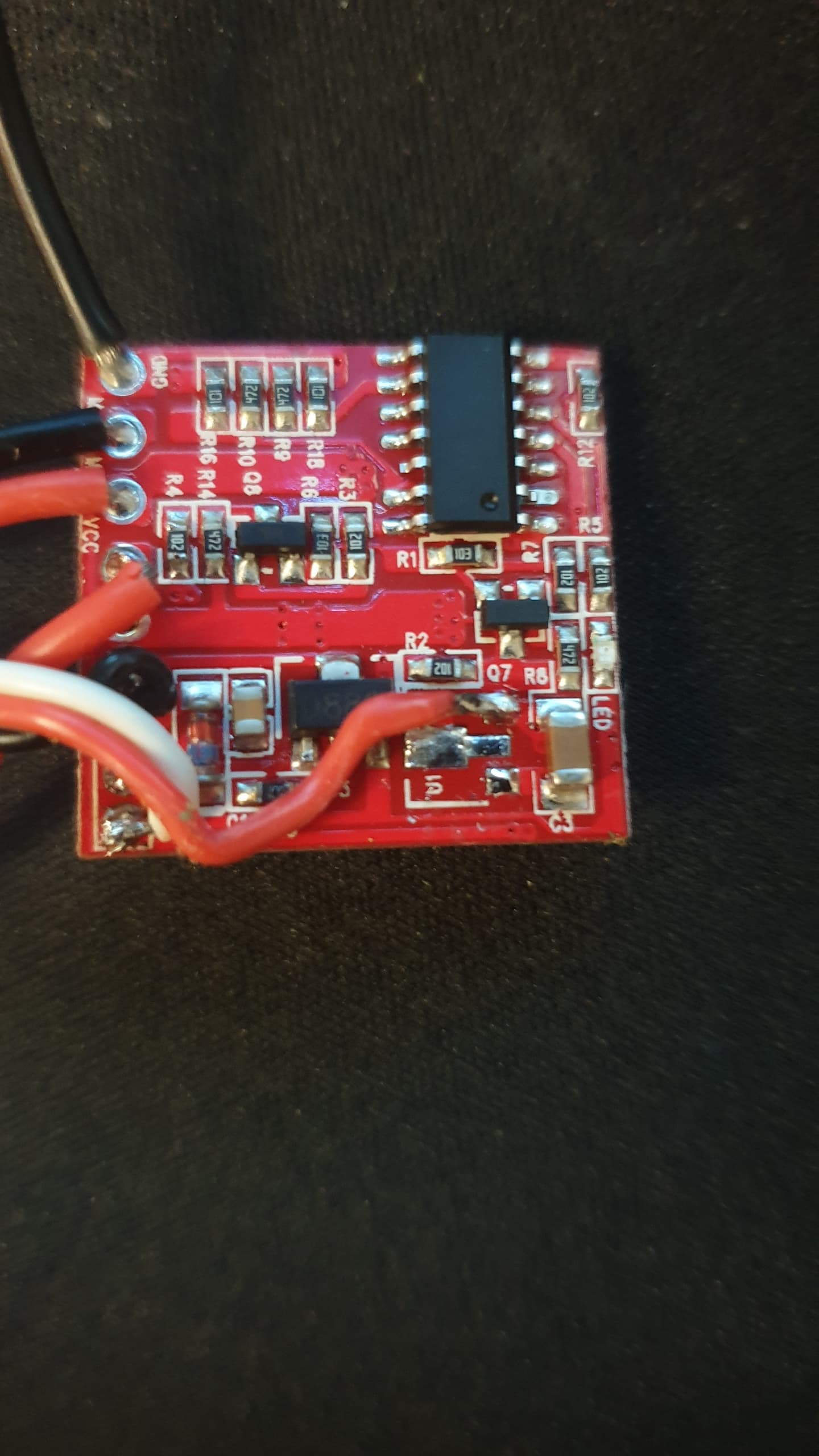
I only got sent one blheli esc so im waiting for another one before i can get main propulsion working. I have also modified the brushed escs so they are powered from the pixhawk esc rail rather than their own hot linier regulators.
I am recycling an old 12s8p pack i made for a bike years ago, by splitting it into 3s8p packs i can move them around to balance the boat. I should end up with around 60Ah at 12v 3s. due to the age of the batteries i will be adding an active balancer to make sure one group doesn’t drop too much.
first test with the motors running on a spare esc, one of the couplings isnt true and is causing vibrations, apart from that, lots of power and still cold after a minute at full power.
first videos of all the motors active in manual mode, the battery was very low so the pump valves are fluttering a little sometimes. needs tuning to balance the thrust to make handling easier and the outlets choked a little to keep the pressure up.
Main motors are now running BLheli32 escs at Dshot 600 with telemetry.
thruster motors are now running modified 20A brushed ESCS, I have removed the hot linier regulator and wired them to the pixhawk servo rail for power so they run much cooler.