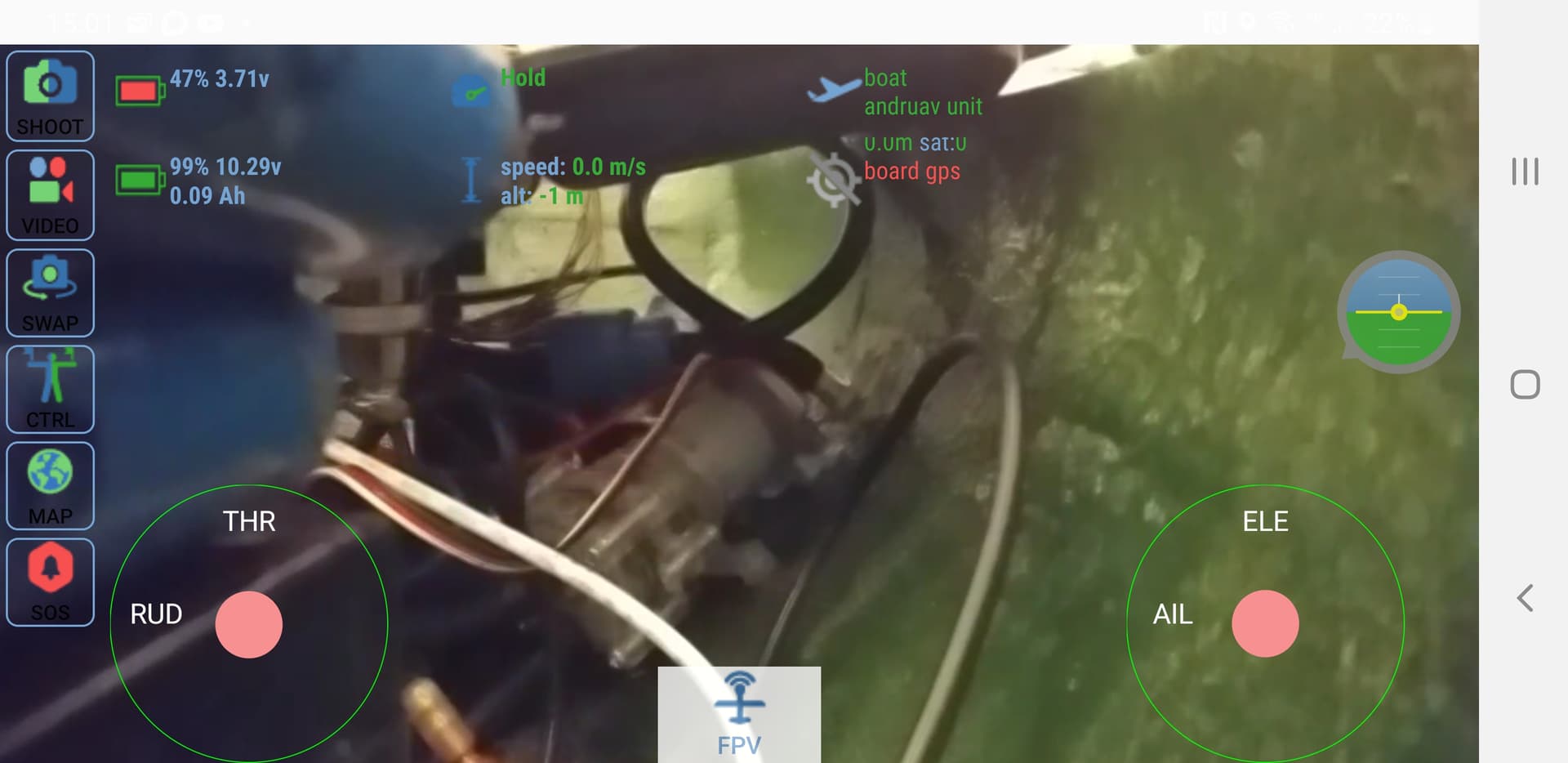
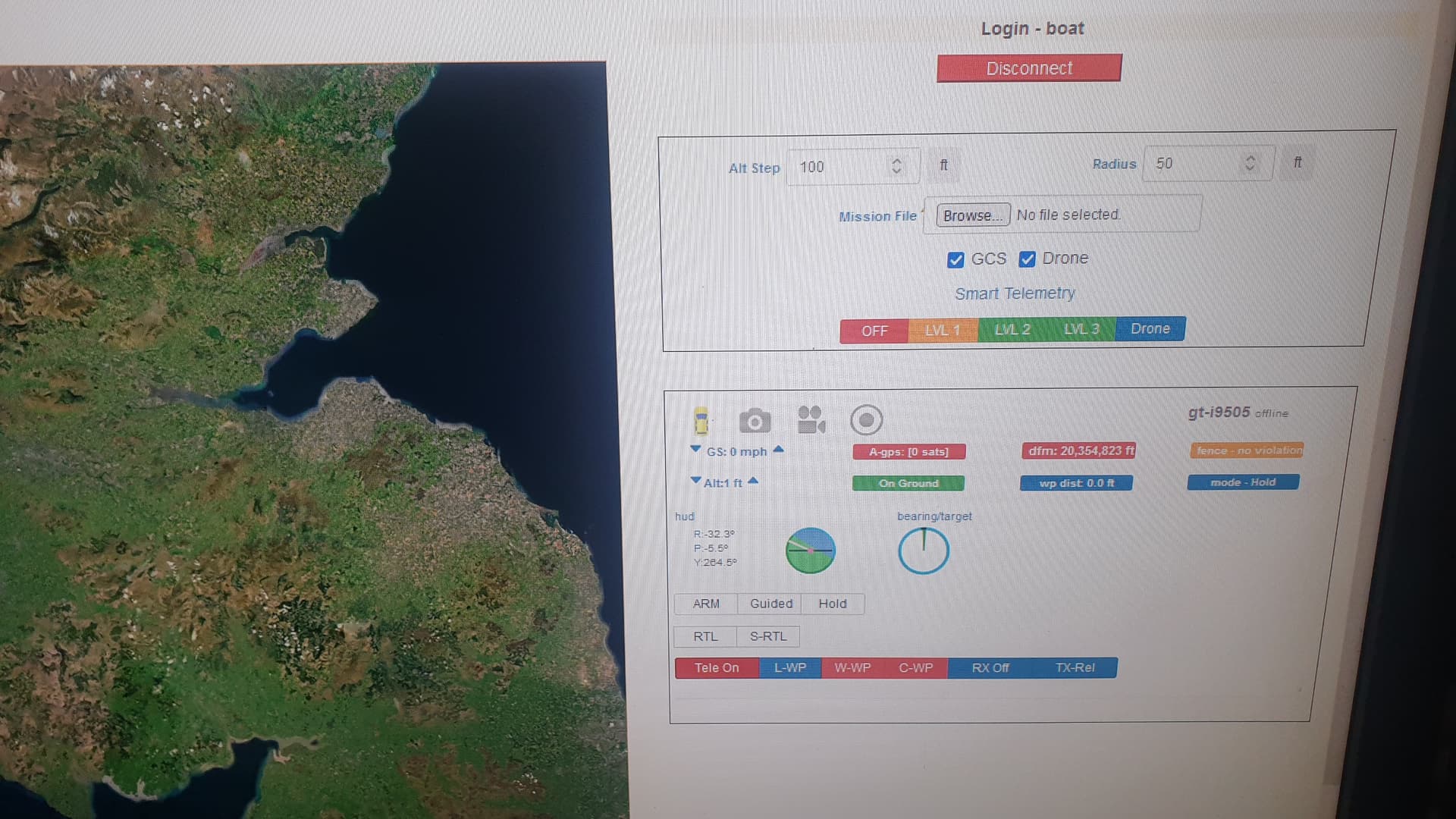
Testing the 4G setup with both cameras working.

1 Like
Hi @geofrancis, thanks for sharing so much info as you go. I’m also working on an autonomous boat myself. What are you creating those great FPV / OSD images with?
Andruav, there is an android phone on the boat that handles communications, it connects to the flight controller using usb, wifi or bluetooth and then the phones cameras are used for fpv. the reason i used a phone and not a pi is power consumption, a pi4 pulls 5w just at idle whereas a phone sips power and has a extra gps recevier, accelerometers, cameras and a light built in I plan on mounting it to the deck in a waterproof case and using a dual sim phone for multi network redundancy. sure its not going to be able to go far out to sea but it’s ideal for coastal use. I would love a satellite modem but they are very expensive and so is the data and power usage.
Another idea I had for a cheap long range tracking system was just to use AIS, there are fields for data other than position and that should be relayed back as it’s picked up by other receivers on its travels. so you could track critical items like main battery voltage and waypoint number.
1 Like
Ahhh very cool, thanks.
I have fitted a RockBlock satellite modem to my boat along with a Pi + cellular modem to cover different scenarios. Power consumption is an issue, I need a bigger hull so I can put more solar on. 
you could save 2.5w just going from a pi4 to a pi 3b. I gave serous consideration to using an APM2.6 as they only use 0.2W! Compared to the 2w the pixhawk uses, but it was just lacking too many features I needed like sail and omni.
That was another reason I removed the hot regulators from my brushed ESCs so they are powered from the pixhawk servo rail BEC was to make them more efficient. my original design had everything wired to a bank of fets so it could power down parts of the boat automatically as the battery got low but for a boat this size the wiring would have been a nightmare. so im just going to disable the motors and thrusters in software rather than cutting power to them completely and just use the mosfets for the lights.
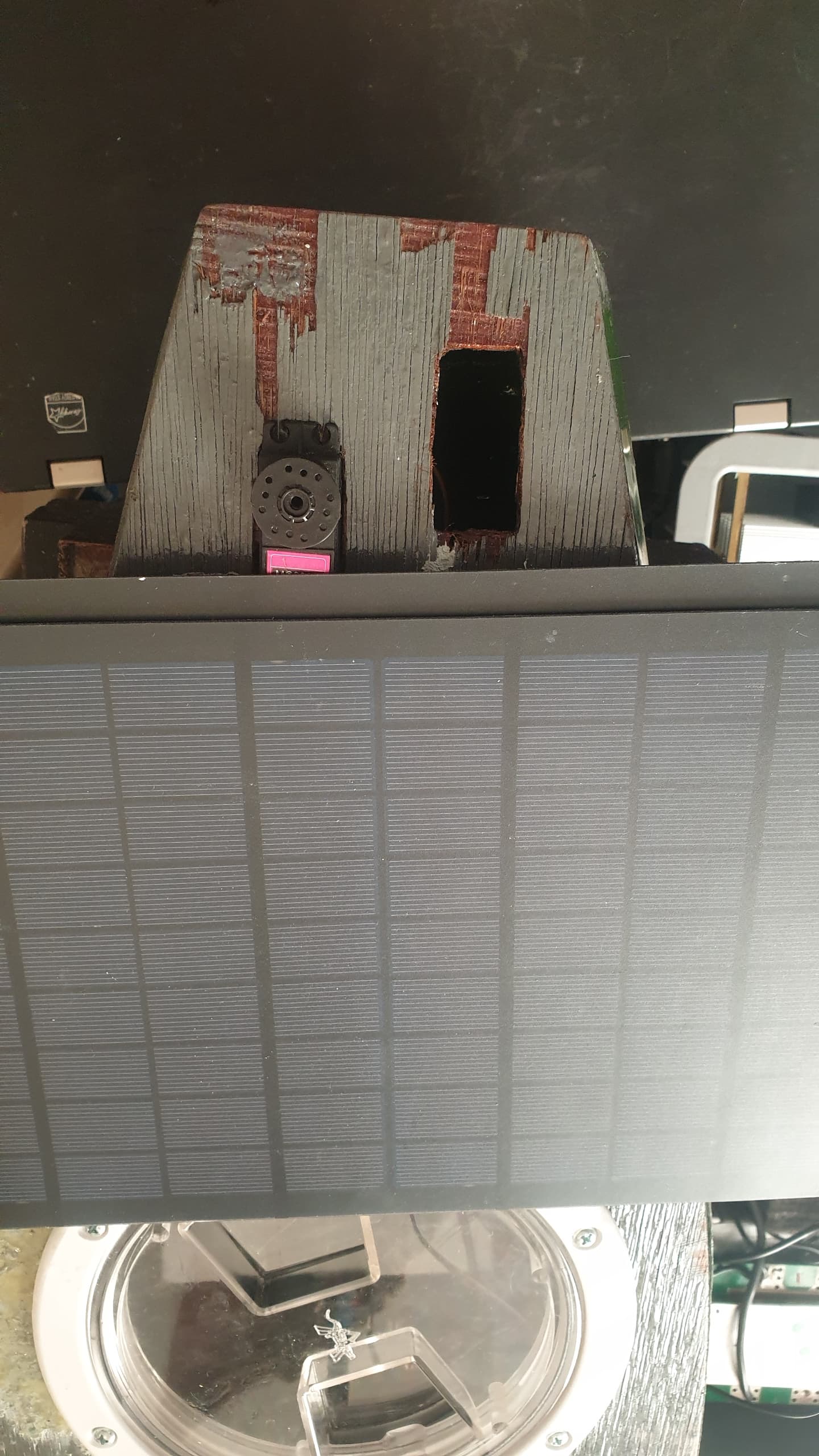
lol I almost forgot, the solar on this is going to be special, It’s going to be retractable. Because like you, i have a lack of surface for solar but having them hang over the side is dangerous in bad weather. so my plan is to have them stacked on the deck and be able to fold out then retract at night or in bad weather. this lets me get 4x the coverage i could normally get and still keep some usable deck space. I am also giving serous consideration to placing the panels on pan/tilt servo mounts so they can track the sun during the day and act as solid sails at night.
I’ve seriously considered building a “mule” hull to tow behind the main boat, just to carry more solar. But I think I’ll just build a bigger hull.
By the way my biggest power challenge is the main motors, they dwarf the power draw of the control electronics. I decided against a sail/wing so the boat could be rolled and survive. Maybe a small durable wing would help?
That is why I went with the Foam wing sail to begin with its massively buoyant and durable, it will float and years of crashing planes tell me that the only way that is getting broken is with a high speed impact. The mast is mounted to the deck with 2 large flange bearings and a 10mm carbon tube. My current design works out where it can run for 48 hours on battery alone if it only sails, it should consume around 5w to possibly around 8-10w max when streaming video.
My plan for power management is to control the sail 3 position switch using the battery voltage and lua so if:
Battery >90% then use motor only
battery <90% >30% then sail with motor assist.
battery <30% then sail only.
but if your doing something like mapping where you need to hold a fixed course you could just sail the downwind legs and motor upwind.
thaat would be an interesting option for saving power during mapping.
there is going to be an arm coming out from each servo to each solar panel, they are offset one above the other. there are going to be 3 pairs of these on the boat, each with a 8w panel. this is the storage position, when in use they will rotate out over the side of the boat and will be automatically retracted based on light level and roll limits. I also have the option of adding tilt at a later date.
they have a version of the 4g software that runs on pi
https://www.droneengage.com/
1 Like
I am ordering one of these boosters for my pumps, they seem to have a really narrow voltage range where they are putting out high enough pressure without overheating so fixing the voltage should eliminate that issue.

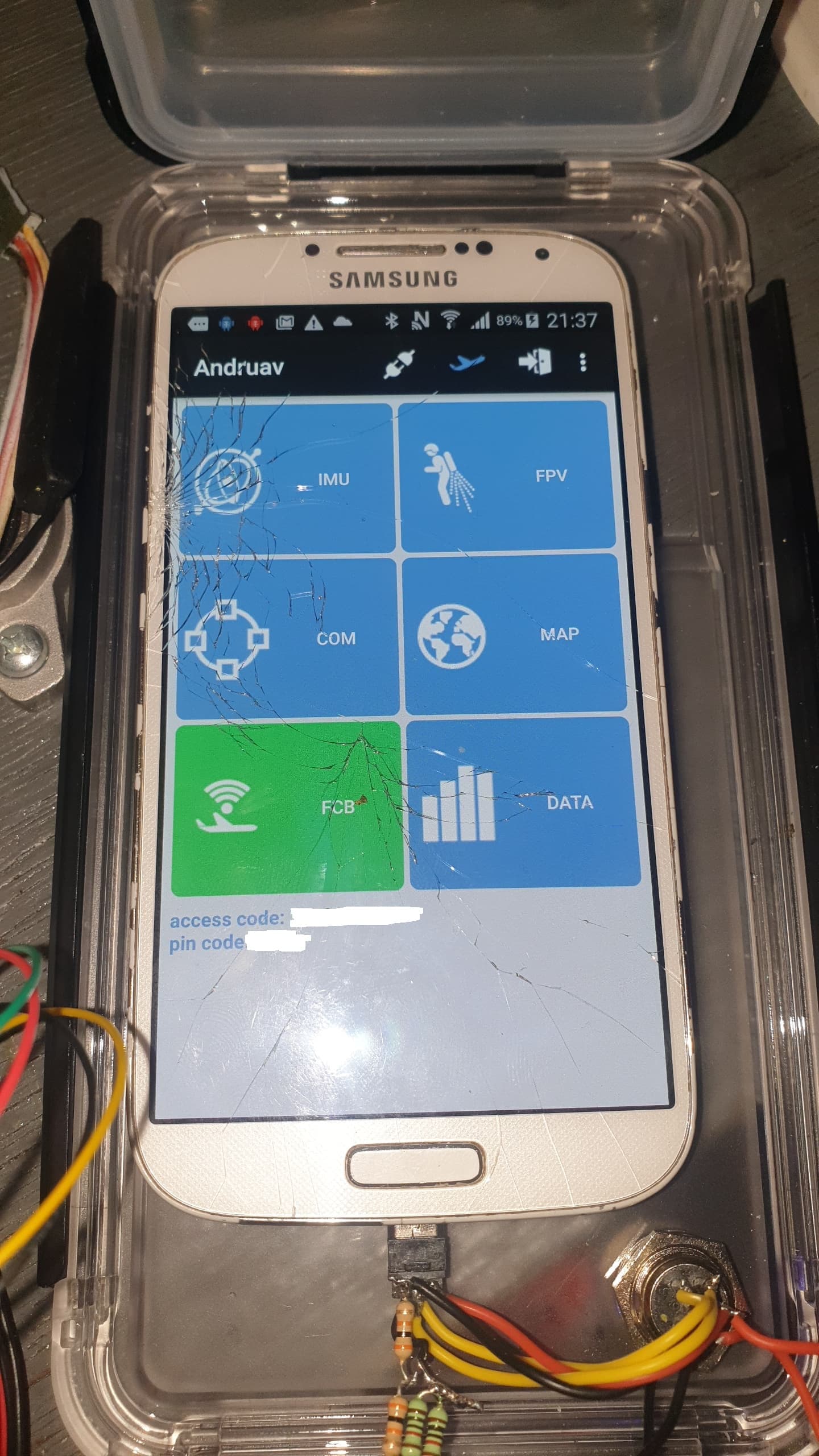
My modified s4, a resistance of 64.9k is needed to put the phone into “dock mode” rather than otg mode. This allows the phone to charge and be usb host, by connecting directly with usb it will free up a serial port on the pixhawk.
Its currently connected up and is setup to run for the next 48 hours and I will keep trying to connect to make sure its still alive.
2 Likes
I recently got the 3s active battery balance board. This does a number of things but its main function is to keep all the cells balanced at all times. This really helps if:
your running older cells
if your going to be running for long periods of time
As a backup, the balancer can compensate for a failed cell holding the pack voltage up essentially emulating the failed cell long as its not overloaded.

I have to give a massive thank you to @rmackay9 @tridge @rishabsingh3003 @MHefny @stephendade @McKey for the help getting things this far.
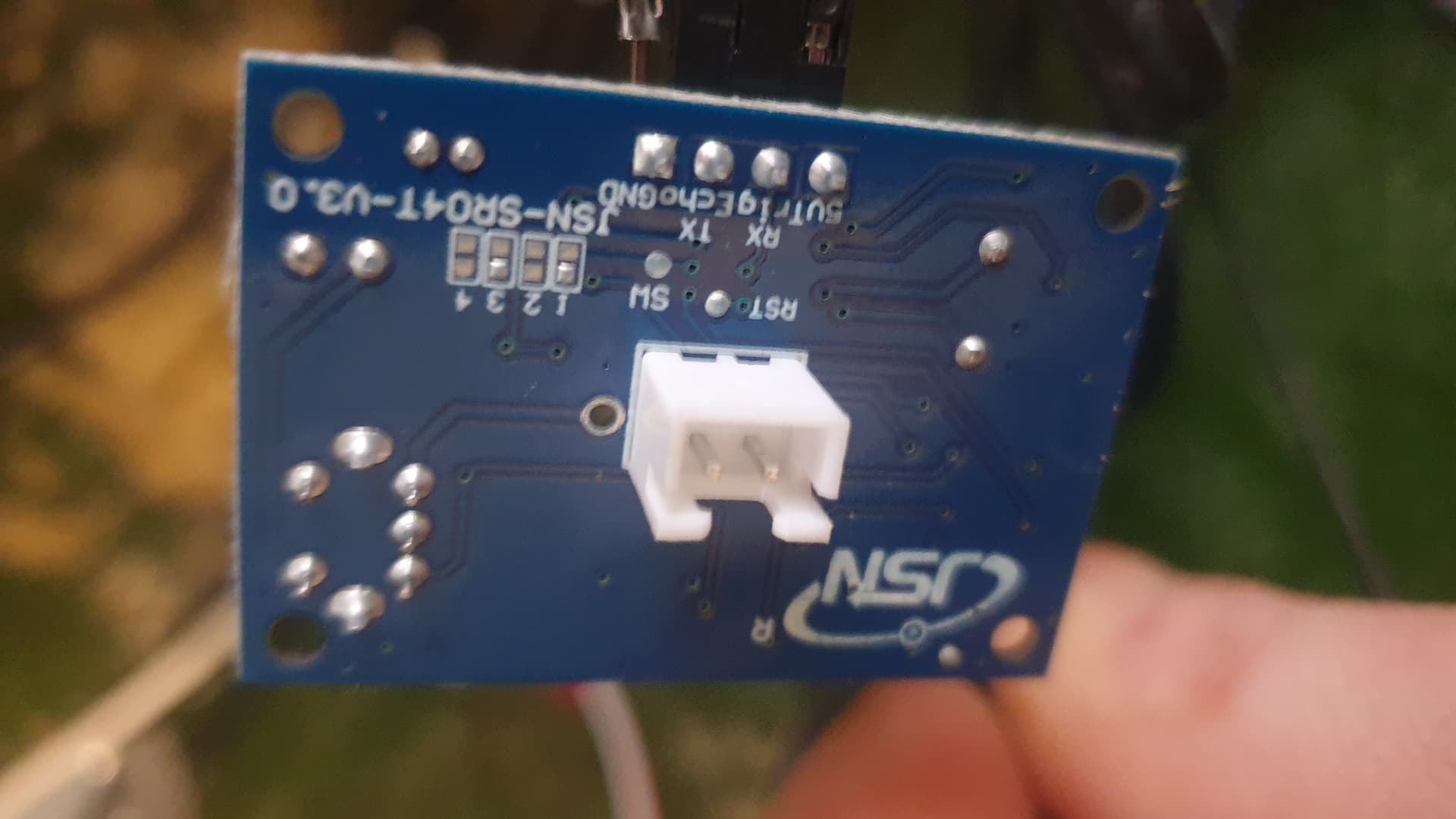
With the latest additions to ardupilot i now have a working depth sounder natively supported in the driver that can be purchased for under £5.
https://ardupilot.org/copter/docs/common-jsn-sr04t.html
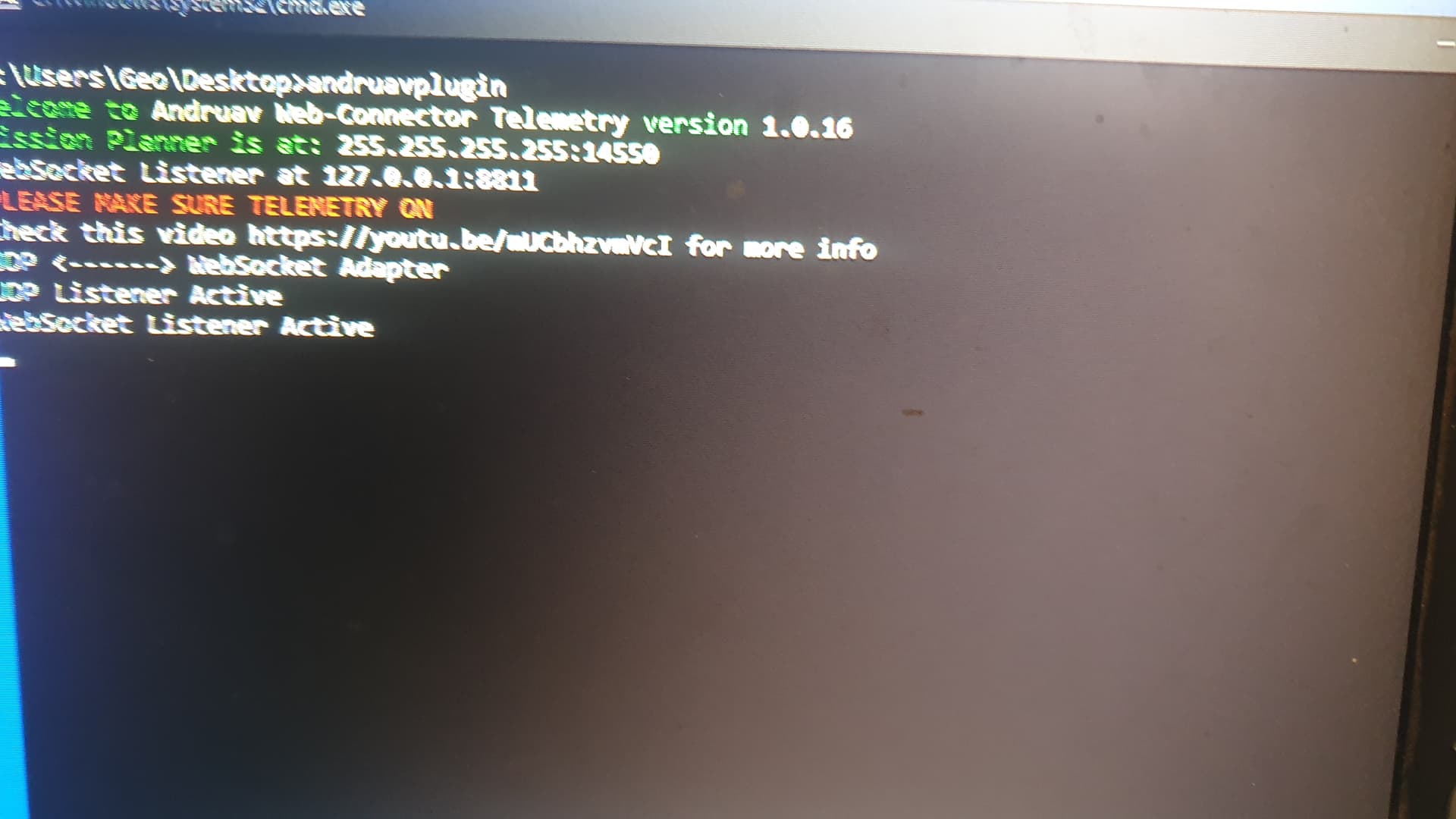
With the mavlink 1 fall back patch andruav is working flawlessly



3 Likes
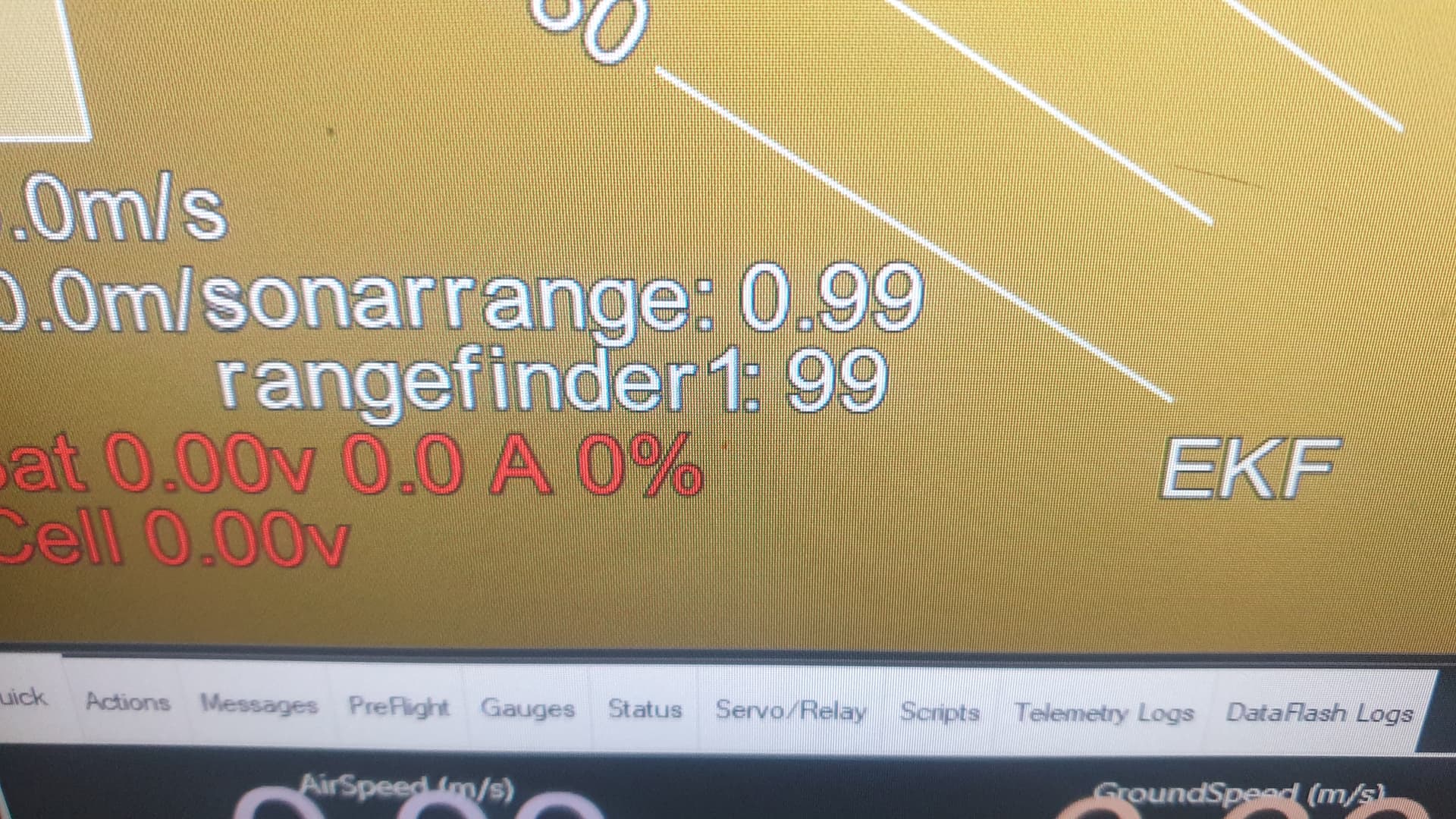
I have an opinion. since the speed in the water is 4 times faster than in the air , the minimum distance also increased by 4 times so that the controller had time to process the signal . therefore, the minimum depth is about 1.5 meters.
1 Like
Yes. I have been struggling to test it properly since I dont have 1.5m of water to test until I take it to the pond.i think that is why it never filtered over that it could be used as a depth sounder because people had not tried it in deep enough water to get a proper reading.
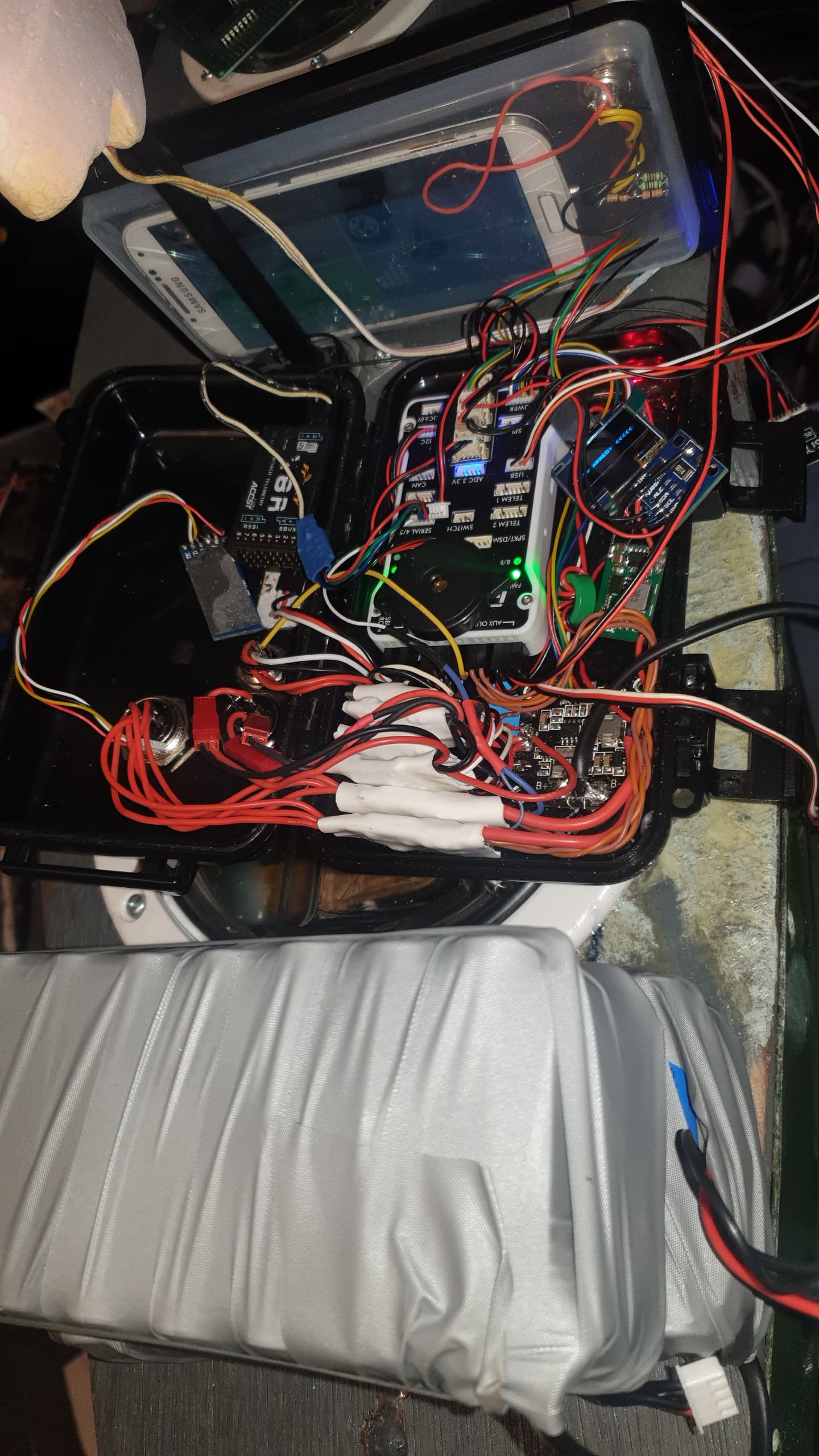
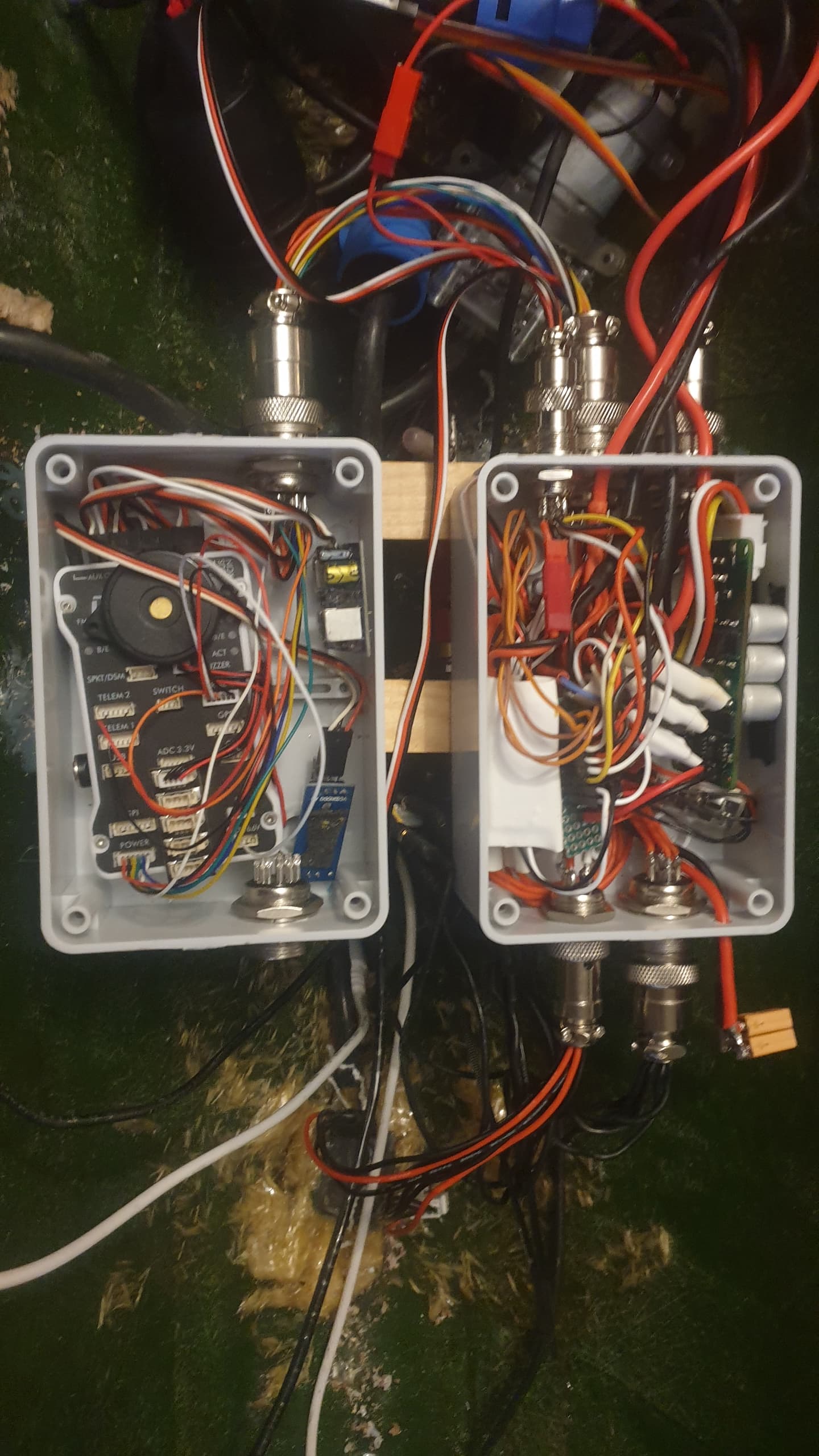
Voltage booster for the thrusters arrived along with the new connectors and boxes.
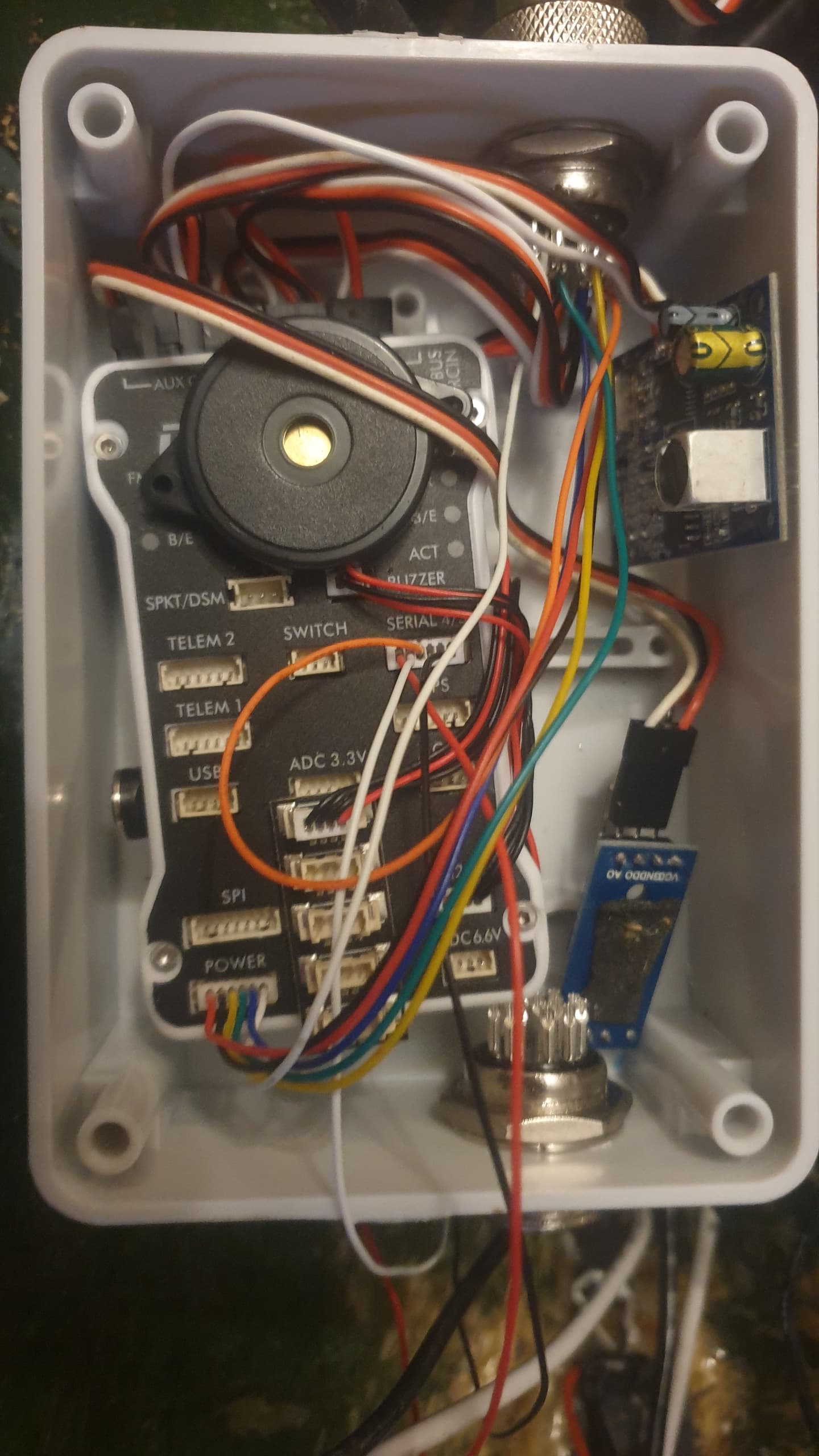
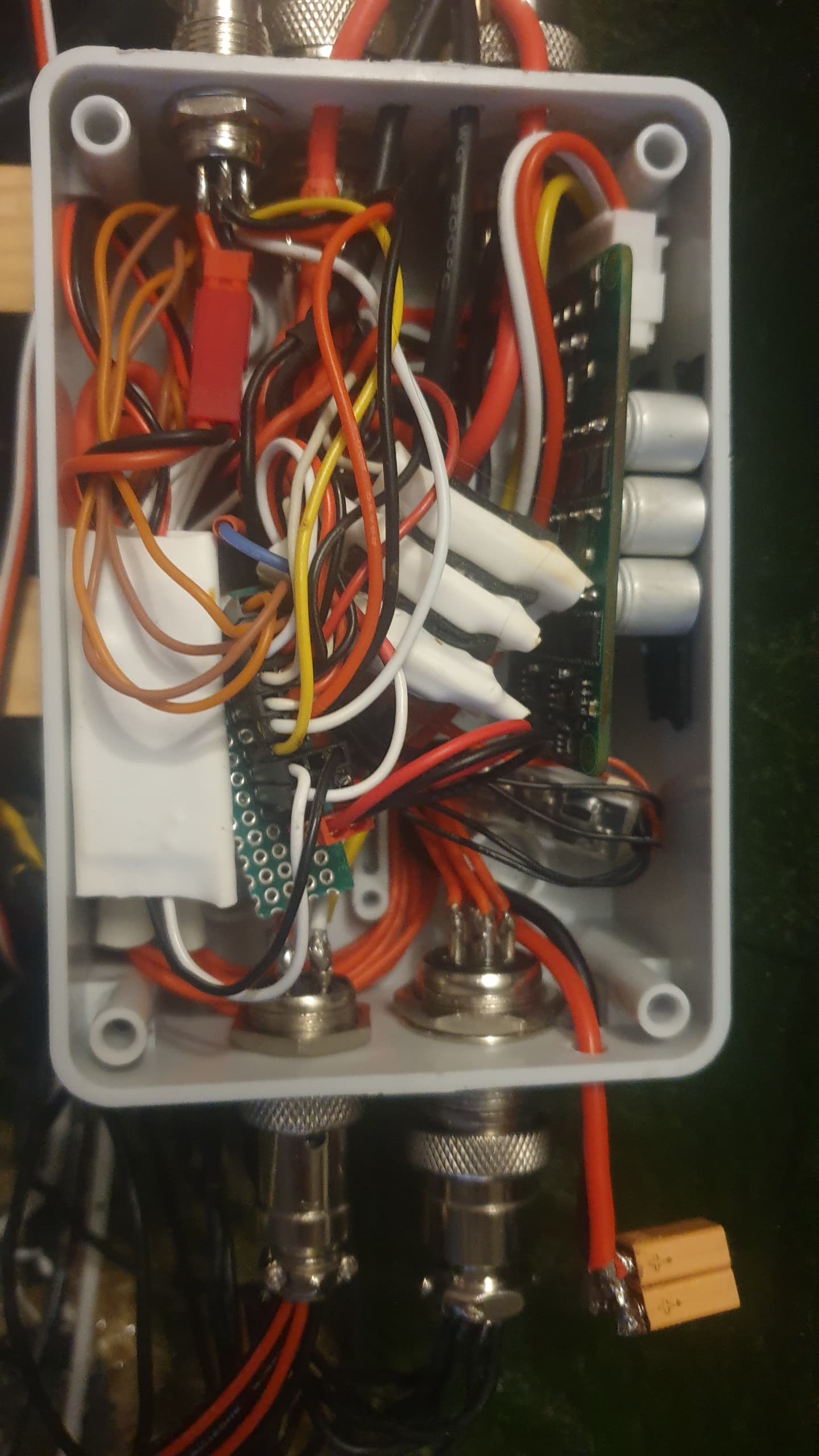
one box is for everything power and motor related, so escs, pdb,power module, i2c power sensor, battery balancer and mppt charge controller. the other box is for the pixhawk and its sensor inputs like the sonar control boards, the leak detector control board, there is also a third box with a esp32 that holds the rest of the sensors.


Phone mount complete, I wanted something I could fold for transport and go pro brackets are ideal. There is an alloy mount screwed to the deck. The waterproof phone case is attached to the bracket with a 3d printed gopro adapter glued to it. This way I can get a clear view of the boat and its high enough to alway be clear of the water.

2 Likes
Nice project and good progress.
Thank you for sharing.
2 Likes