Motivated by the great demonstration work of ppoirier on using range finders together with UC4H (here), I also went into exploring range finders. I actually can’t believe that I were never considering them before, so simple and so useful (a bit pricey though).
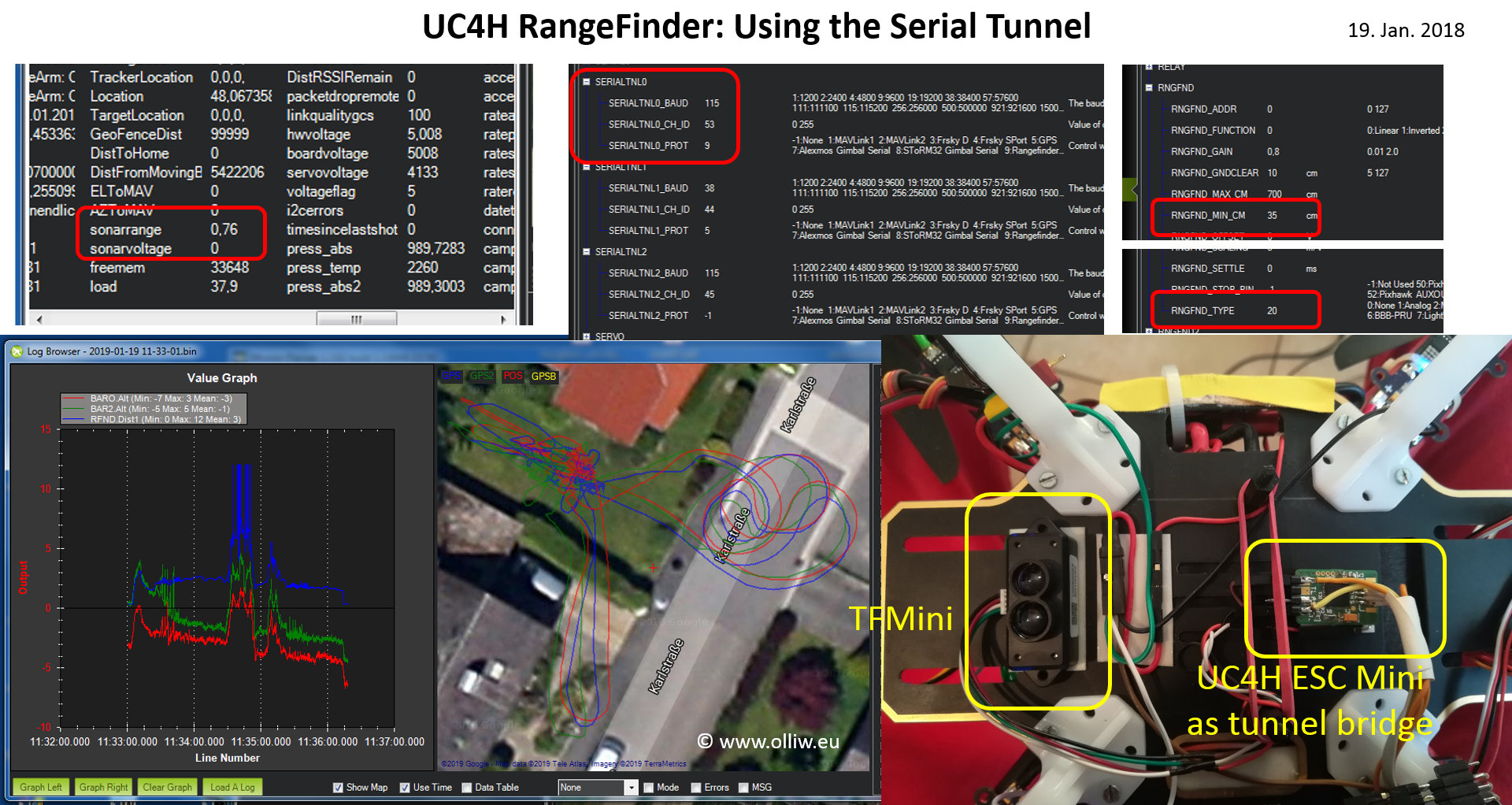
So I got me a Benewake TFMini range finder, and it’s working just great together with the UC4H tunneling and BetaCopter (the tunneling code on the UC4H side needs a tiny adjustment to make it work perfect, I’m nevertheless working on a new scheduling mechanism to hopefully get something „universal“).
The UC4H’s serial tunneling concept has proven itself again. However, it doesn’t scale well, and this – IMHO – bites especially for rangefinders. So, I designed a new compact yet data rich DSDL message, which reduces the bandwidth requirements by a factor of four and yet offers more data (the distance message of the standard DSDL isn’t very useful). And I of course adapted BetaCopter to consume it. This new message will become relevant if not crucial for what I have in my mind: A copter with 10 rangefinders, all on UAVCAN (I’m going to call this the UC4H Bumble Copter LOL).
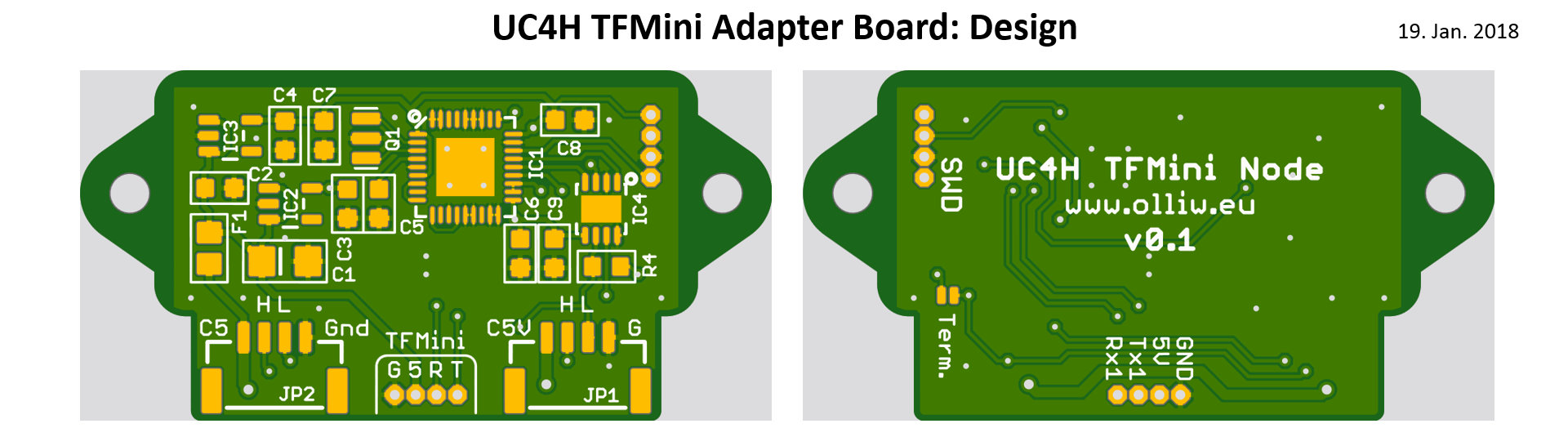
Since I like it nice, I also designed a little adapter board for the TFMini. This will pack it all together into one little cute package. This easily could become the first UAVCAN Rangefinder!
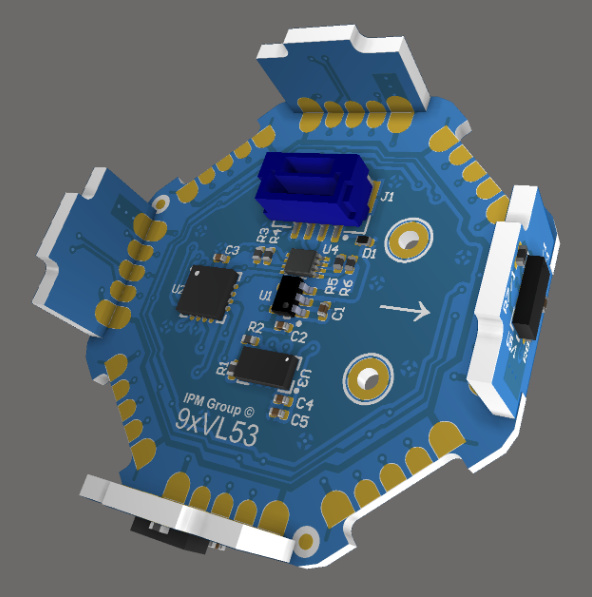
The next bigger step will be to also support the VL53L1X, including designing a nice little PCB. I mean, I’m not going to afford 10 TFMinis, so 9 of the 10 rangefinders will have to be VL53L1X LOL.
The UC4H adapter board for the TFMini range finder arrived. It was easy to assemble, and is a perfect match. What a cute little item this is, the first UC4H RangeFinder…
Mike I see you have this working with betacopter. Have you been able to make it work with AP? I have a couple of the MRO F303 boards and I have yet to be able to get a range finder (tfmini) to work over can.