OlivierV has recreated the issue in SITL. If one of the core devs can create it in SITL we should be able to get to the bottom of it quite quickly so we would really like to get details on how to do this. Some questions are:
Was this SITL inside Mission Planner?
Which version of Mission Planner (or another GCS) was used?
Specific steps to recreate the issue. An example of the kind of detail that would really help would be something like:
upload this mission file
on MP’s Actions tab select “Guided” drop-down and press “Set Mode” button
press Arm/Disarm button
push “Auto” button
select “MISSION_START” from top-left drop-down and press “Do Action” button
I was able to replicate the issue using SITL inside Mission Planner (1.3.62 build 1.3.6777.19762 Arducopter V3.7.0-dev (5f9de3cf).
The steps I took were as follows:
Run SITL with Multirotor Firmware
Design waypoint mission with home position OTHER than the drones actual position and include Take-off command as first command, RTL as last command.
In the actions tab, press the “ARM/DISARM” button.
In the actions tab, change mode to Loiter, then use first drop down to select “MISSION_START”
In the actions tab, press Arm/Disarm button
Select “DO_ACTION” for the first drop down menu (previously changed to MISSION_START)
In the actions tab, press RTL button after flight is underway.
I have repeatedly seen the drone go to the home location as defined in the waypoint plan and not where the drone was actually armed.
Here is a link to a screen recording (apologies for the watermark, I didn’t want to spend extra cash on documenting this as I had to use a different laptop to get SITL to run): https://youtu.be/nrJD76E9vKE
Also, just for the record, the field operation where this issue showed its face was as follows:
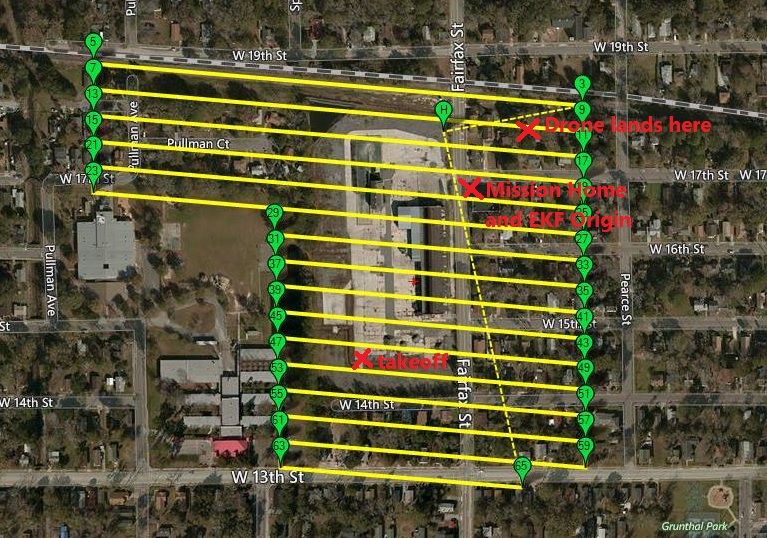
Flight plan was designed in the office with an arbitrary home location (in the image Randy Posted, it is shown as the “Mission Home and EKF Origin”) and was uploaded to the drone at that point.
The operator arrived on site, placed the drone down at the take-off location, went through the start-up procedure and once all EKF checks passed, engaged the automatic mission.
Operator got nervous about flight time (for some reason) and decided to end the flight early after waypoint 61 by putting the copter into RTL.
The copter flew past the home position towards the “Mission Home and EKF Origin Location”. Being nervous, the operator then started trying to fly the drone back to him, hence the difference between the actual landing position and the “planned” landing position.
Thanks for this. I quickly tried to reproduce this following the instructions above but wasn’t able to. I am using the beta mission planner (1.3.62.2 build 1.3.7010.7155) so perhaps this explains the discrepancy. Anyway, I will try some more. I must say that I’ve never even seen the “Set Home Here” button on the Flight Plan screen before. Anyway, txs again for the info, hopefully I’ll be able to reproduce it.