We are building a Octocopter fpv system which has a gimbal mounted on top of it. It is running Ardupilot which we need for geo fencing features.
We’ve been having some challenges getting it tuned properly. Before Ardupilot we ran it with Betaflight and it flew nicely on stock tuning parameters but for some reason since running Ardupilot it oscillates quite a bit which presumably is a tuning/filtering issue.
I wonder, as this is a commercial project whether there would be anyone who can assist us in remotely tuning the system who has a greater knowledge base in this specific FC. Willing to contribute to the community for the time spent.
This will not be true for Arducopter. At a minimum some Initial Parameters need to be set before a flight attempt. Start with The Initial Setup Parameters screen in Mission Planners Mandatory Hardware section. Then plan on configuring the Dynamic Notch Filter. Also, the gimbal will either have to be removed or locked into position. After the above, which will take several flights, running Auto Tune is typically the next step.
Thanks Dave, really appreciate your reply. We have set the initial parameters and have attempted to tune our notch filter settings with little success. Would you be willIng to have a video call to walk me through carrying out this process effectively?
Sorry, no to a video call but if you post a link to the .bin flight log of the Flight you made with INS_LOG_BAT_MASK set to 1 (pre-configuration test flight) I’ll be happy to review and you will get a wider audience for help.
1st you should be running the Bdshot version of firmware for the Matek H743 and configure to use it. Then configure Dshot600, it’s more reliable than 300. Set the Log bitmask back to default as you are not logging RCout. And then make a hover flight in AltHold so MOT_THST_HOVER can be learned and some good data can be logged to set the Notch Filter. Bouncing around in Acro isn’t getting you anywhere.
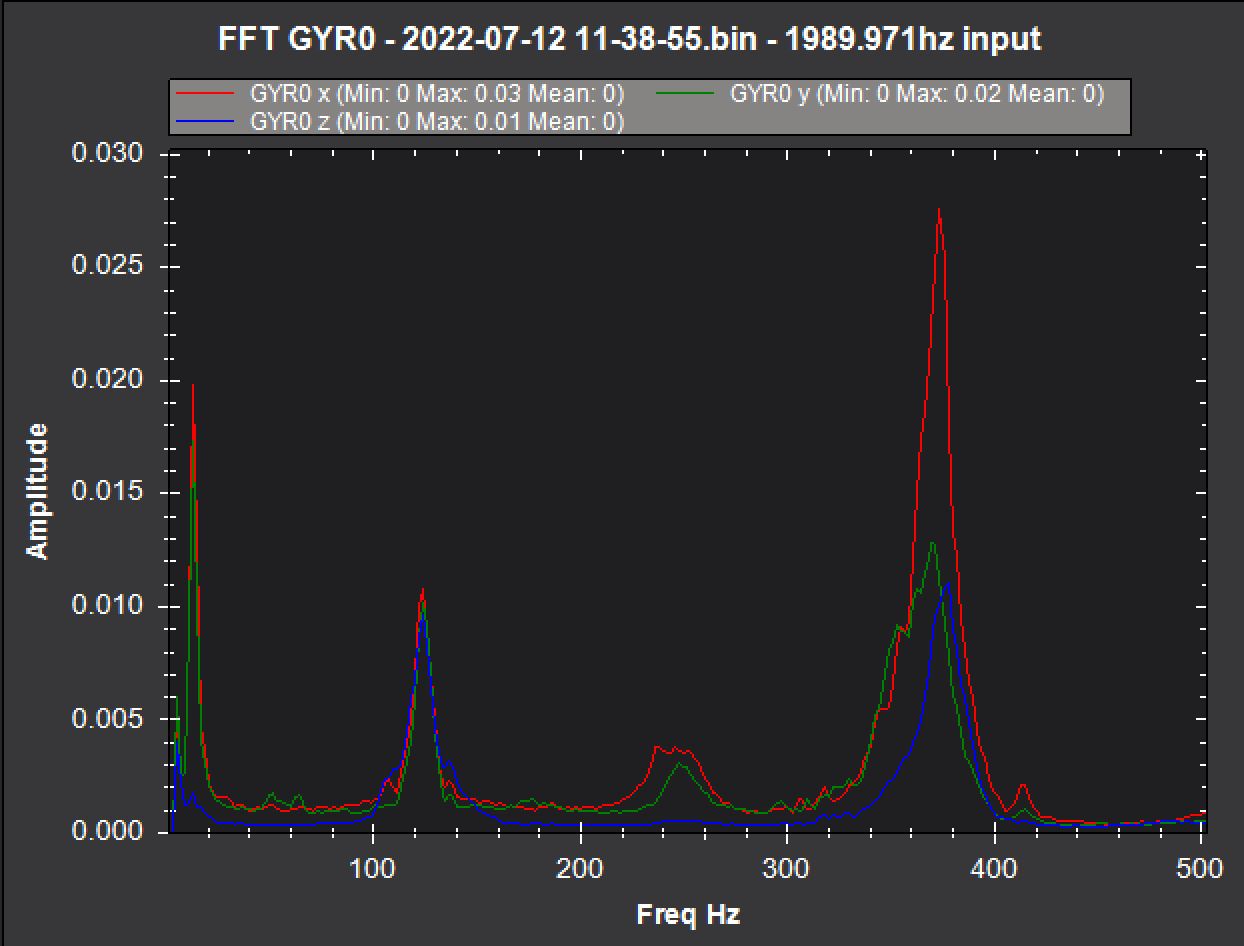
Yes, much more useful. You have a very high thrust/weight Octo there. I still think you should be running the Bdshot version of firmware as it will be a better motor rpm reference for the Notch filter but in any case this is the FFT response:
And these are the Notch Filter setting you should use:
INS_HNTCH_ATT,40
INS_HNTCH_BW,62
INS_HNTCH_FREQ,124
INS_HNTCH_HMNCS,7
INS_HNTCH_MODE,3
INS_HNTCH_OPTS,2
INS_HNTCH_REF,1
Then set INS_LOG_BAT_OPT to 2 and make another AltHold Hover flight to determine if the Notch filter is effective. Perhaps a bit longer fligh6t because MOT_THST_HOVER was not learned in this one.
Before making that Flight I would set these also:
INS_ACCEL_FILTER,10
PSC_ACCZ_I,.220
PSC_ACCZ_P,0.110
In general tuning is surprisingly good for default PID’s.
Yes, targeting the 1st harmonic (~62Hz) will pick up the 2nd and 3rd. This answers your question about INS_HNTCH_HMNCS, 7 also. It’s a bit mask selecting for the 1st, 2nd and 3rd harmonic.
Ah OK this could be the case. @xfacta and @andyp1per can provide more info about this but they are definitely providing ESC RPM telemetry as you have it configured so I would say you are good if Bdshot isn’t supported.
So I tried implementing these changes but when I plugged the system up it gave me an error message down my goggles reading “TOO MANY NOTCHES”. I reduced the notches to 2 harmonics instead of 3 but as i took off the oscillation was very severe and I was unable to fly long enough to log anything worth while. I’m assuming this is because without all 3 harmonics the filtering cannot take place properly. Any advice on this?