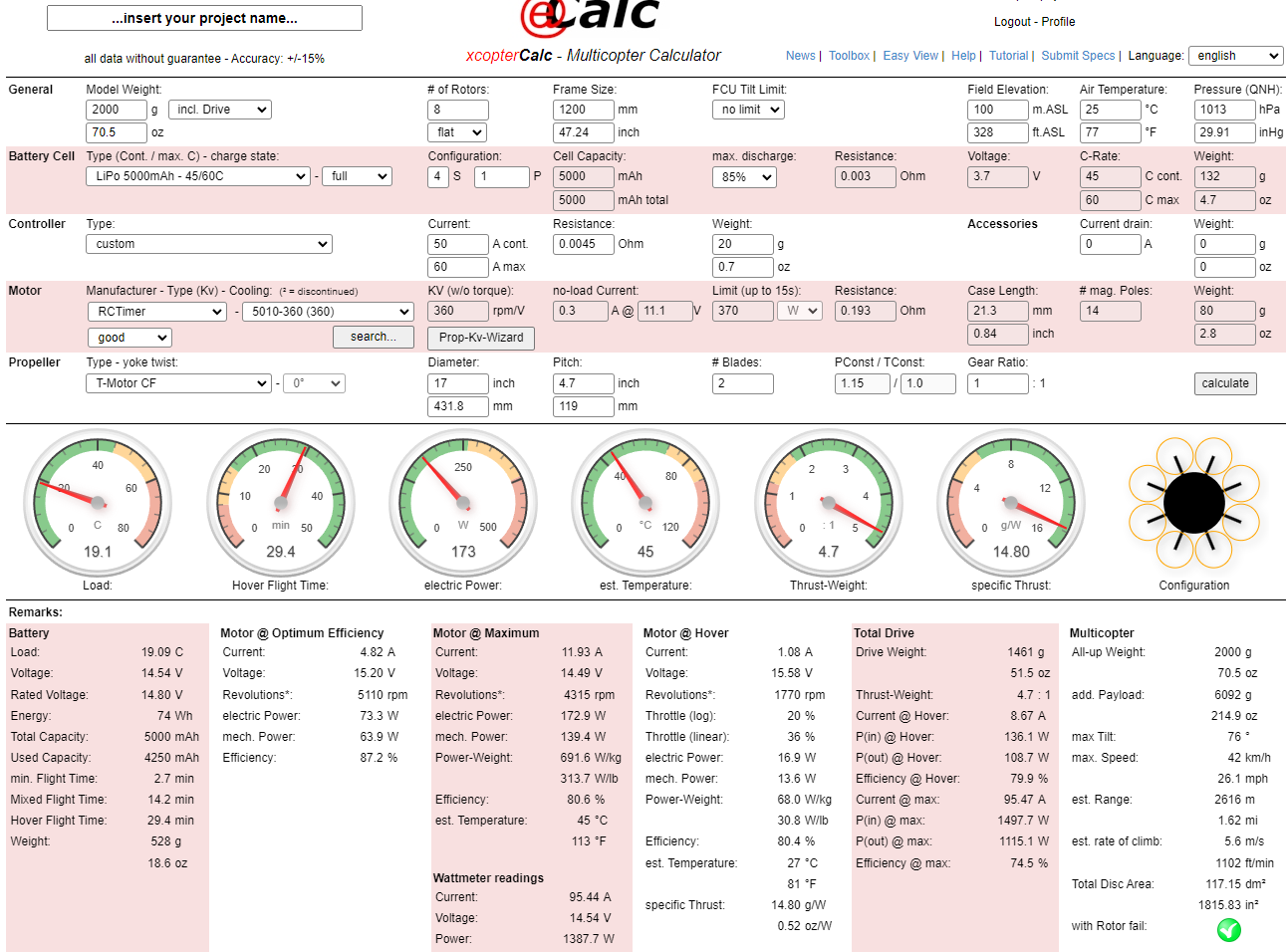
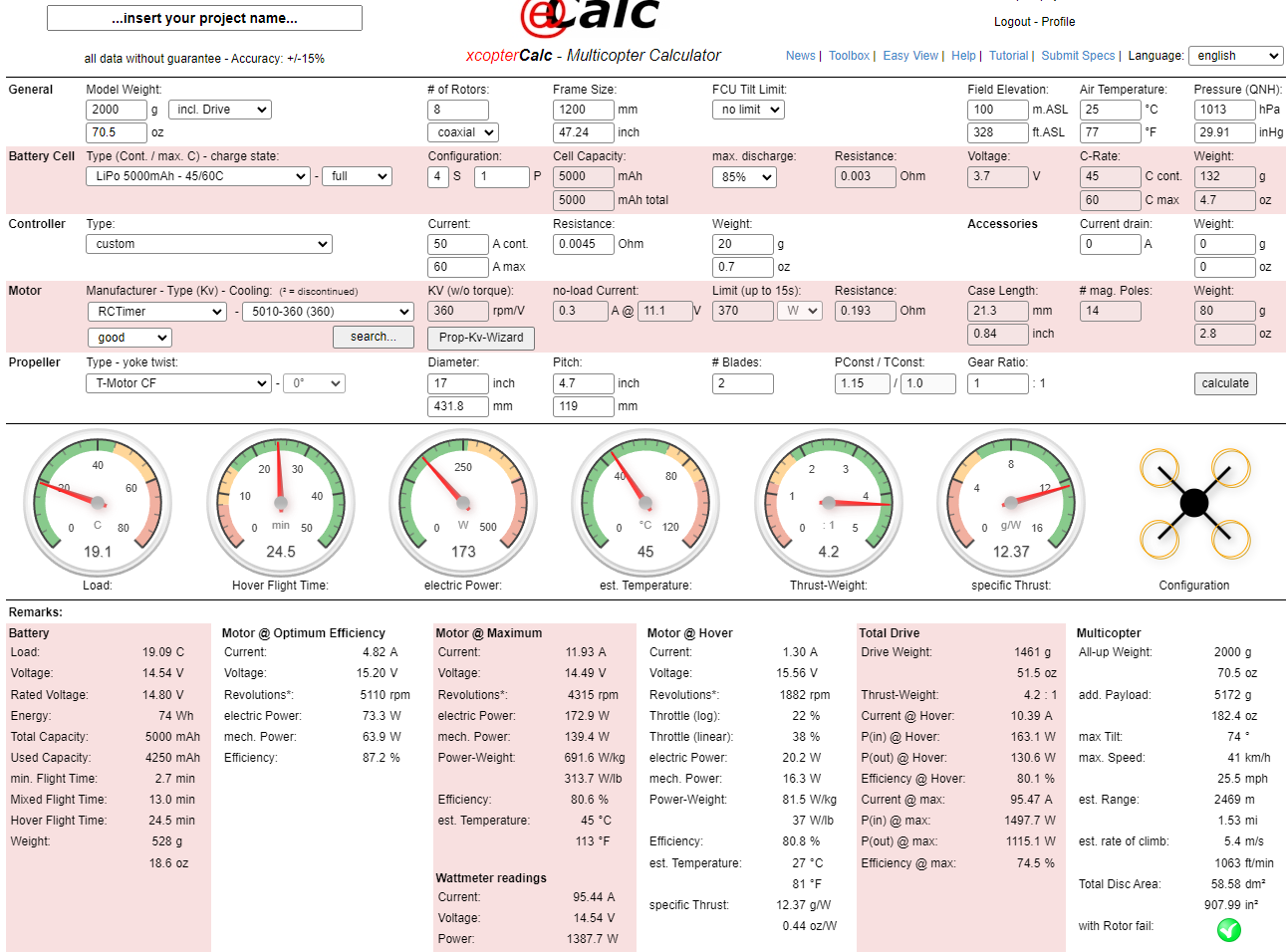
Hi, fast question. I would like to ask how much does the coaxial config decrease max thrust generated by motors, considering we have 2 configs with the “only differece” is motor placement. Let`s say that the octocopter generates max thrust = 8n.
It looks like the coaxial setup results in a thrust deficit of ~11%, with a ~20% higher current draw in hover and a ~17% lower specific thrust.
Keep in mind that this is only a basic calculation for a specific system, real world data, as well as the data for different systems may be different. It should be a good baseline for a first estimation nonetheless.