I need some help with a drone that has crashed already at least 5 times. I have made some tests and found out some ESC problems (changed), motor problems (changed) but even with all these modifications and new elements the drone continues to crash.
Today’s crash happened when the drone was at 25m and all of the motors stopped suddenly.
It is not very pleasant the seconds when you see your drone fall without be able to do something.
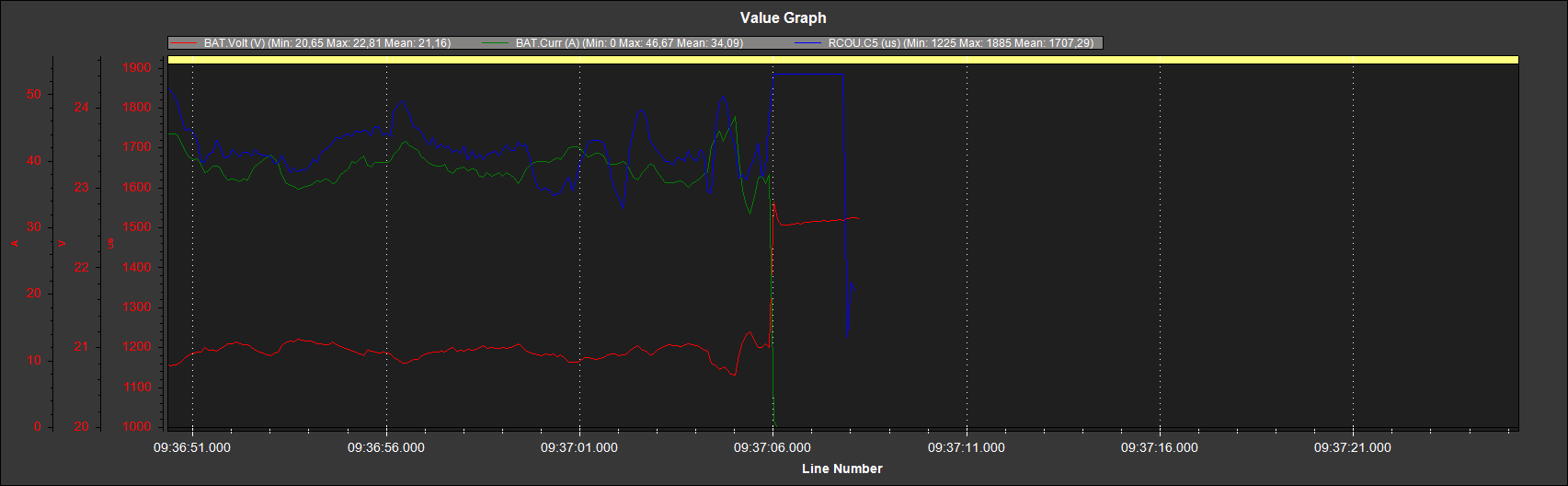
I have spent the rest of the day trying to see something in the logs but more than a current drop to zero, I don’t see anything that clarifies what happened.
Just for info, I have 2 4in1 ESC of T-motor at 45A. They are stacked one on top of the other. On top of this there is the Cube Orange and finally on top of this there are the batteries (2x 10500mAh Li-ion). So it’s like a tower where all of the elements that can heat are together (they are stacked like this to have some space available for the rest of the elements). My theory is that the ESC achieved the max temperature and cut-off. Sadly I don’t have the way to check the ESC telemetry.
I’m not very satisfied with this and I would like to know if maybe anyone can see something else. I only have the .bin from the SD card given that the cube is dead.
Thank you for those who can help me. Every idea will be helpful.
For the PIDs I did first an autotune and then, given that I was not very happy with the result, I tuned these parameters myself. The drone is quite large, distance between motors is ~120cm. The drone’s behaviour before the crash was perfect.
And I do not have a video, but what happened is that after making some roll and ptich mouvements and letting go of the RC the drone just shut down all of the motors (I didn’t hear the other motors trying to compensate) just as if they had lost power.
I had a similar problem with a quadcopter some time ago, with ESCs 4in1, the temperature raised until about 100ºC and suddenly they stopped working. For me is almost the same because when your motor 5 went to maximum, the voltage of the battery voltage was relaxed and the current consumption dropped to 0, and that is a sympthon that the ESC was not doing anything in that moment and probably was powered off.
The MCU used on most of the BLHELI32 ESCs stops working at about 120 degrees C .
Combine that with when BLHELI starts limiting more output:
If the temperature is above the threshold, motor power begins to be limited.
If the temperature is above the threshold plus approximately 15C, motor power is limited to 25%.
And according to limited doco, the ESC wont limit power more than 25%, so you should get a somewhat controlled descent, compared to a complete shut-off and crash.
So the plan would be to set the BHELI32 temperature to 100 degrees C to give the ESC a chance to start limiting before failure.
BLHELI32 settings apply regardless of the protocol used, such as PWM or DSHOT.
Yes I used telemetry throught Dshot to see the temperature. You have diferent ways to reduce the temperature, you can add a little fan, heatsinks over transistors, improve the airflow if they are enclosed… or finally what I did to solve the problem I had in the past, I ended up buying four Hobbywing Xrotor 40A and I put them under the motors with a 3D printed case with apertures, and problem solved
Thank you fot this information. I dind’t know of this max temperature. I think I will make a test where I get the telemetry of the ESC and try to reach the temperature to 120°C just to verify that this is the problem. But I’m pretty sure it is.
In any case this drone won’t fly anytime soon with all this crashes, so I will use it to test the theory.
I think I will also pass to regular ESC, they wil be a little bit easier to cool down. I will continue to use 4in1 ESC only for the small drones.
Thank you for your advise.
Yes, you are right. Maybe the word “perfect” was too much in this case. It is just that with the payload that I have and the kind of flights I do the drone was flying as I wanted.
But given that there are some improvements to do, how can I make it better? You already told me to try to have an I similar to P, but what else?
Set I equal to P.
Configure the Dynamic Notch Filter.
Run Auto Tune again or Proceed methodically thru manual tuning. page down to the manual Tuning section here: Tuning