Backup your parameters to a file.
Use mission planner to reset the parameters to their defaut value.
Download and use ArduPilot methodic configurator software and follow the instructions.
There could be more, so run through the methodical configuration process.
That log definitely shows there is motor mount twist, or frame twist.
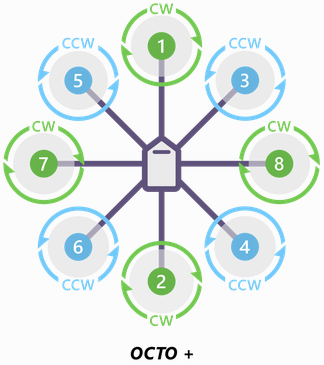
Apart from checking all the props are spinning on exactly the same plane, us MissionPlanner motor test to ensure all the motors are in the correct order and spinning in the correct direction.
Use the “All in sequence” button.
Also compass calibration can be improved, so when you do get it airborne do some circles, yaw, ascents and descent then use the magfit utility to discover the correct calibration.
All your CCW props are rotating at a way higher speed than all your CW props. The CW props are going down to idle speed at times. Are these all the same motors, ESCs and propellers? Are the CCW props really CCW and the CW really CW props?
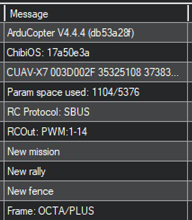
I pointed out that it’s Octo + only because that’s how you have it set in paramaters.
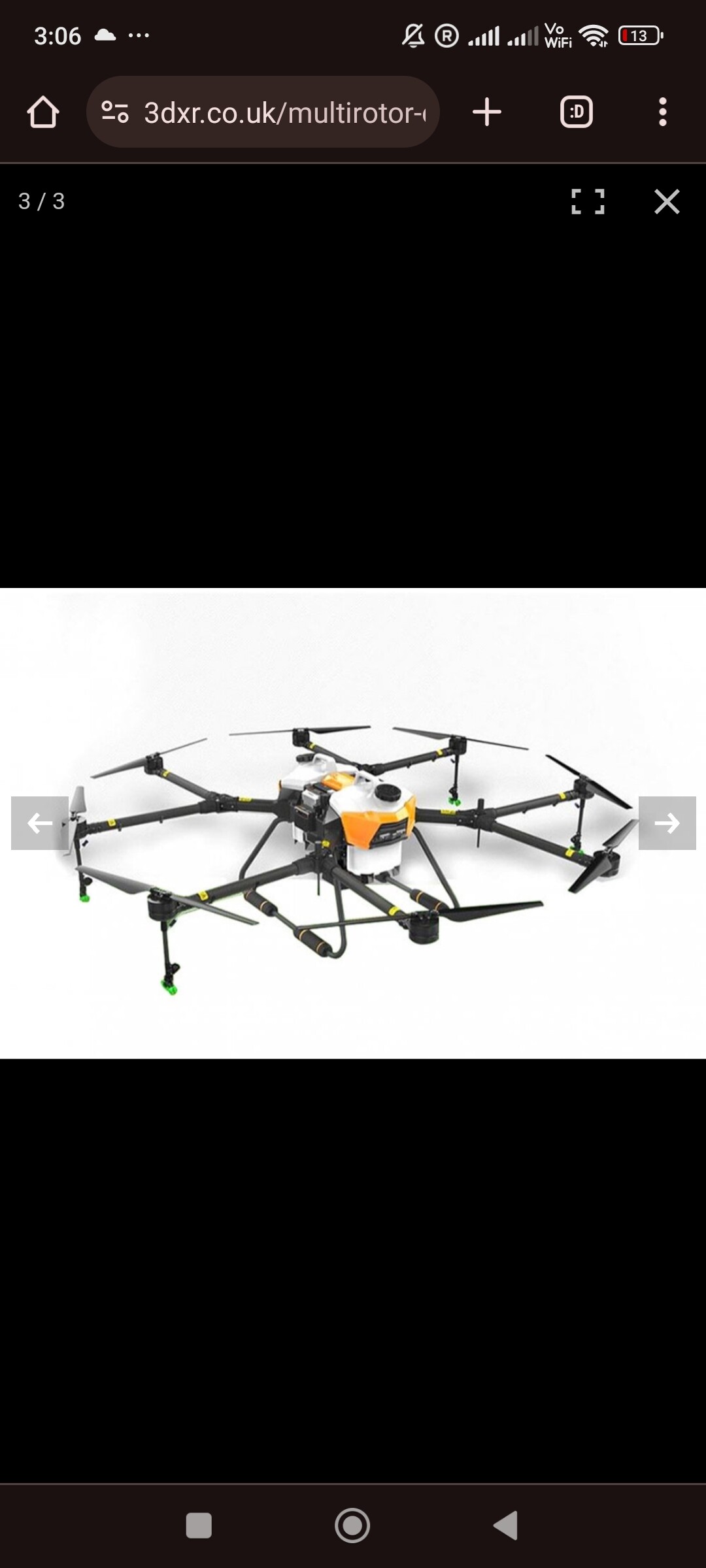
Going by the picture you supplied afterwards it should be an X config.