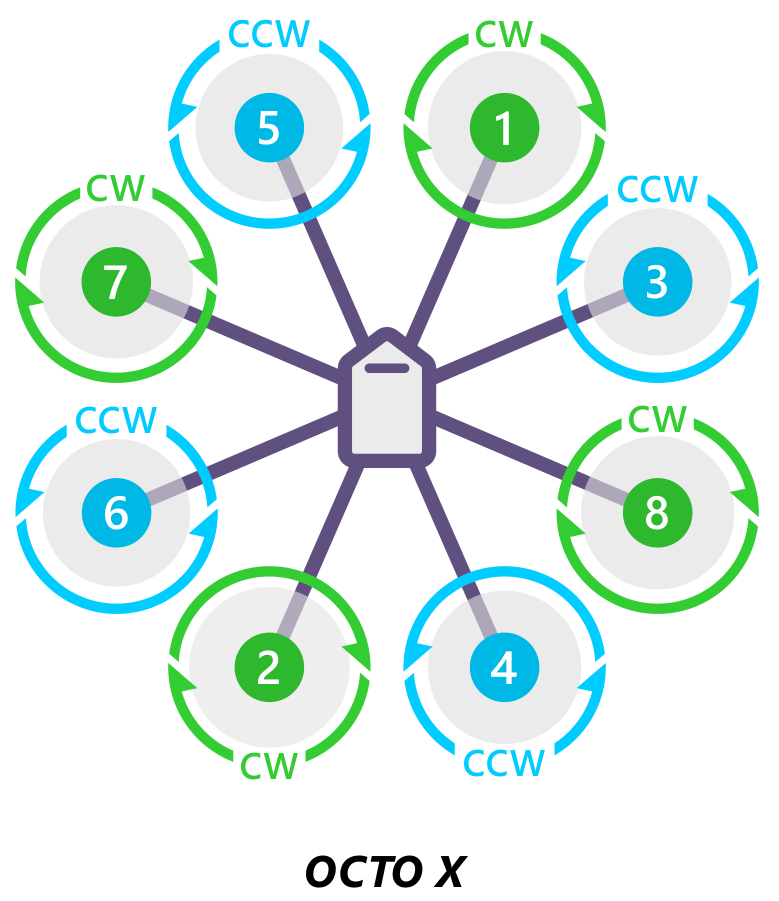
Yesterday I flew at 6 meter altitude after change class x
Then it’s worked well both modes loiter and stabilize
But today I flew autonomous
mode Auto then it’s reach 300 meter altitude
Then gone for mission it’s continuously rotate
Till land
I flew again then I face same issue
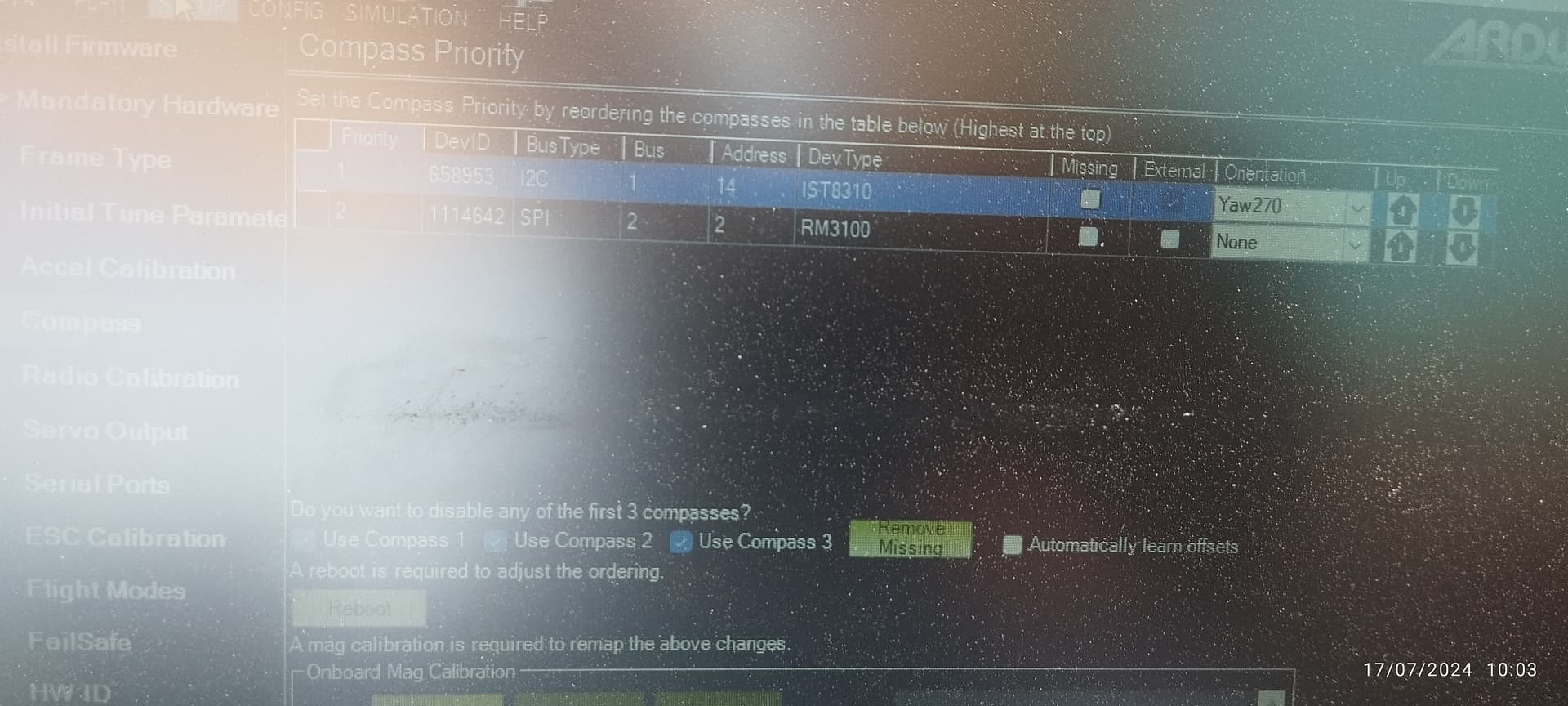
May be it’s compass error