I’m currently trying to do object avoidance with the RPLidar C1 mounted on top of my drone, running ArduCopter 4.5.4. For benchtesting, I connect the drone to Mission planner, and, in the plan view, open the “hidden window” with STRG-F and select proximity. The values in the radar view look reasonable. The drone is connected to a power supply all the time to account for power demands the USB connection might not meet.
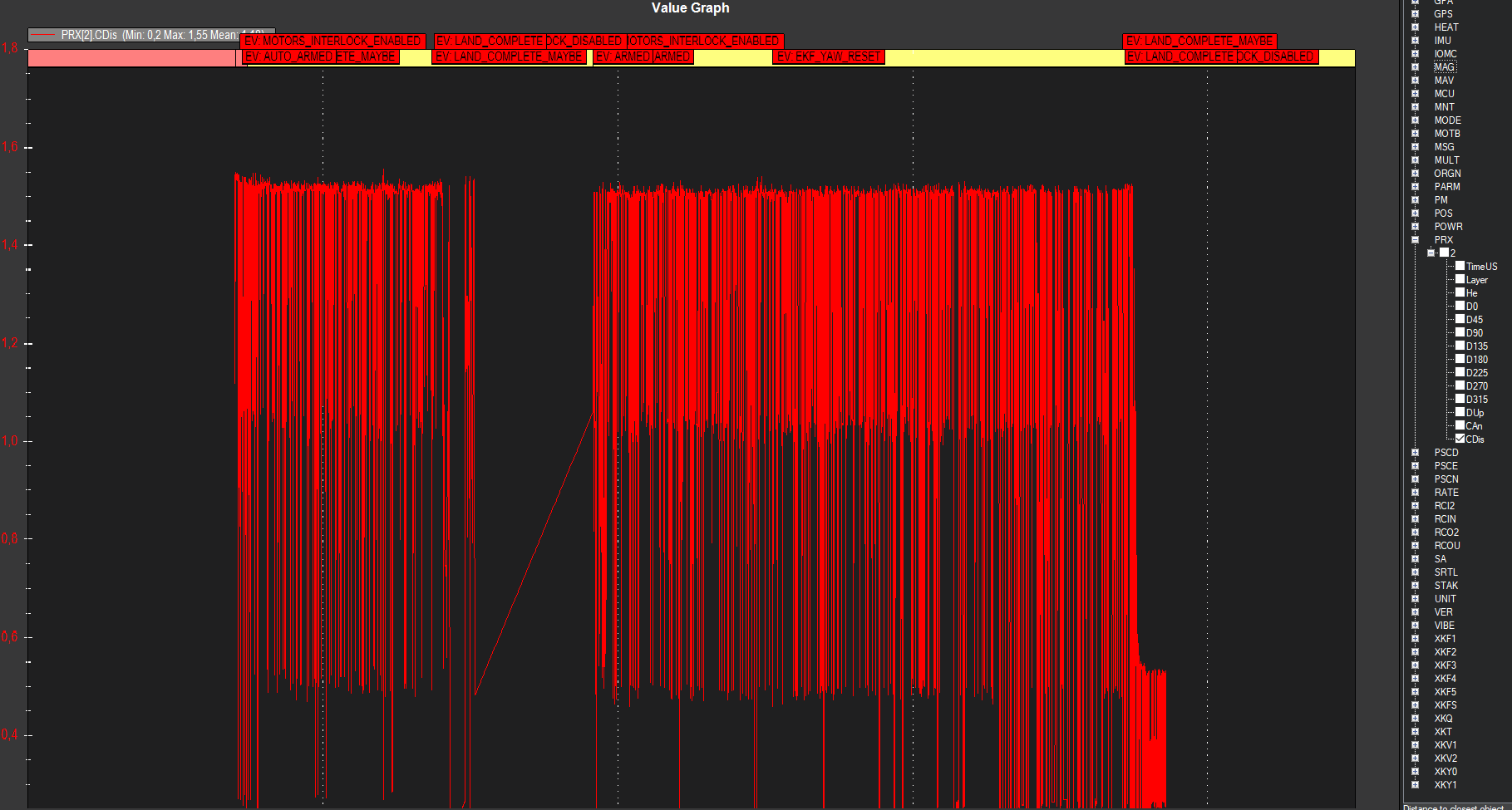
However, as soon as I test the drone in the field and activate object avoidance, it starts shaking as if it was constantly avoiding obstacles from all directions. The output from PRX->Cdis was:
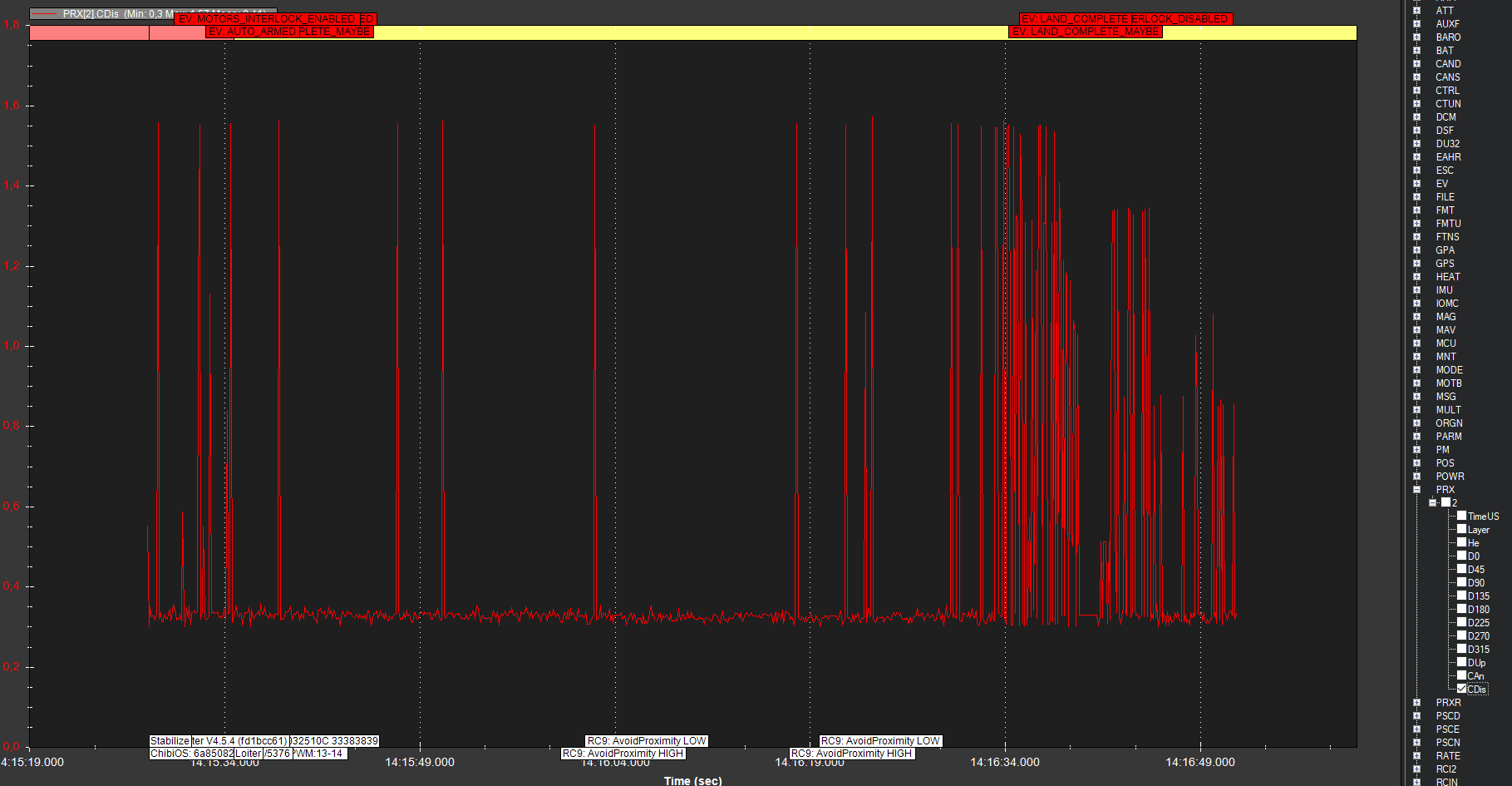
These measurements were taken on a sunny day, so I retried everything in a shady area with no direct sunlight, where the light intensity was well below the lidar’s ambient light limit of 40.000 lux.
This time, the test was less shaky but still completely unusable. The drone drifted continuously away from obstacles that weren’t there. In fact, the drone had a free view of at least 4-5m in all directions.
Does anybody know what could cause this behaviour?
The flight logs:
Sunlight
Shade
Addendum:
I just found out that sometimes, during benchtesting, the radar view in Mission planner will display completely chaotic values. Every direction seems to show wildly oscillating values that are normally distributed around the middle distance between PRX1_MIN and PRX1_MAX. Disconnecting the drone from the GCS and completely restarting it fixes the problem. I haven’t found the trigger so far.