Hello,
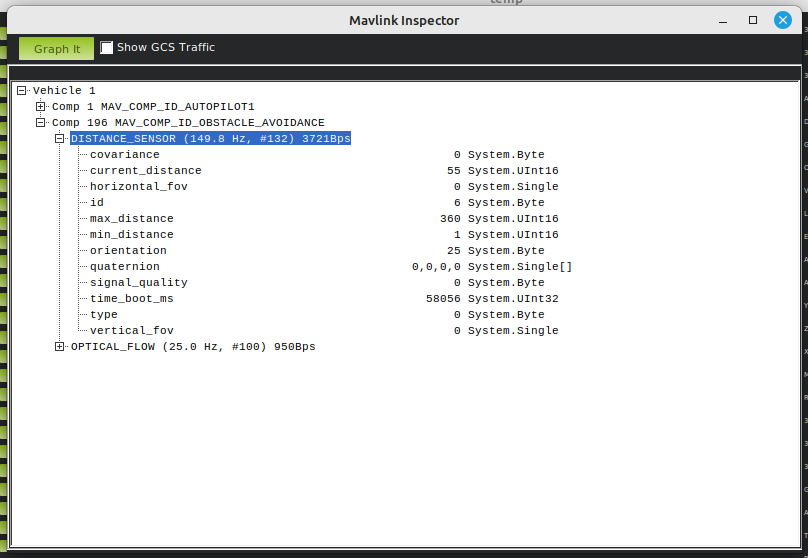
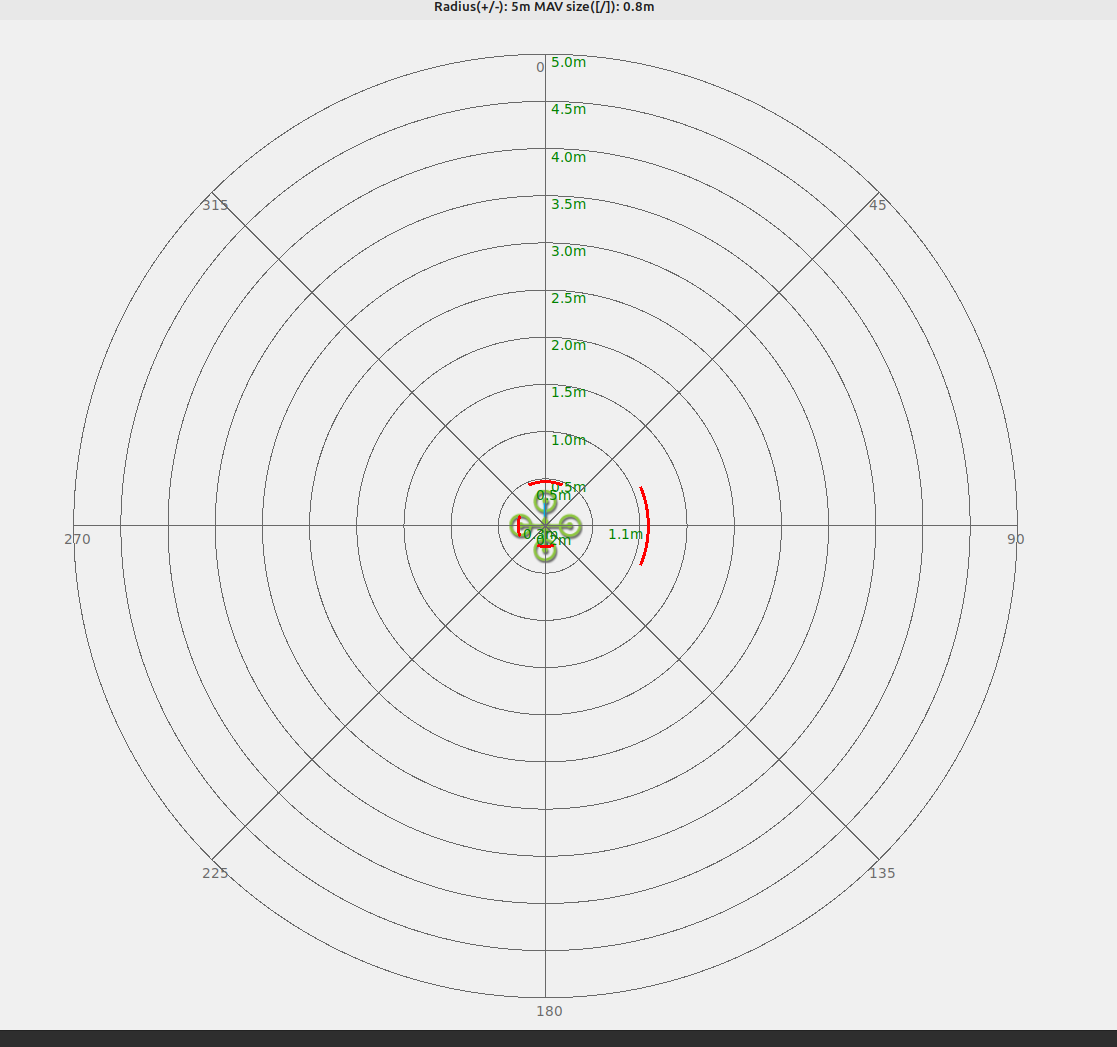
I equipped my quad with VLX rangefinders facing 0, 90, 180 and 270 degrees and I am using them as proximity sensors for simple object avoidance in Loiter. Downward facing rangefinder is also present. The behavior I get is somehow unpredictable: when going slowly towards objects the quad will stop and backup as I expect it to do, but when going a bit faster towards objects or even when backing up from object to object there is no stopping and the quad hits the object. DISTANCE_SENSOR message are present and proximity data is there:
Drone is not using GPS but optical flow sensor for XY velocity control and I am flying indoors only.
Are my expectations too high in terms of how object avoidance should react or is the update rate of distance data too low or are there some config options to address this problem? Any ideas?
Thank you!