This article describes a new Linux-based board for Ardupilot called Open-Board Architecture for Linux (OBAL). It is designed to be simple to build by professionals as well as hobbyists.
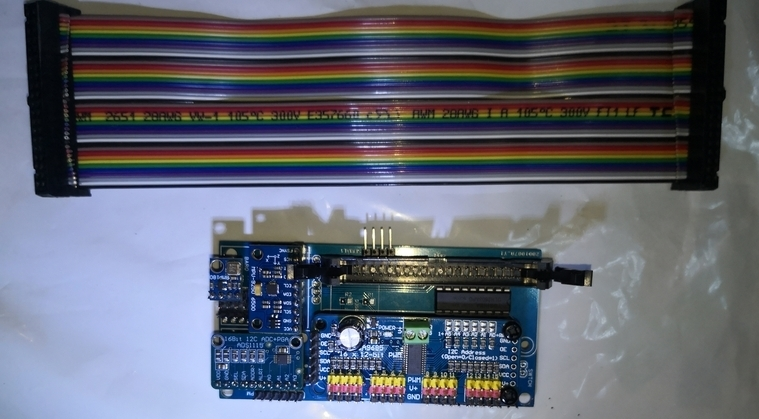
OBAL acts as a simple board with necessary sensors that can be upgraded easily. The board is built over Raspberry Pi. It can use Raspberry Pi 2,3,4 & zero.
Current Linux-based Ardupilot flight controllers that run on Raspberry Pi usually consist of a shield with built-in sensors on it. That cannot be removed or replaced easily. However OBAL is more like a test or development board, where you can remove sensors and replace sensors easily. Also sensors on the board are breakouts that you can solder easily.
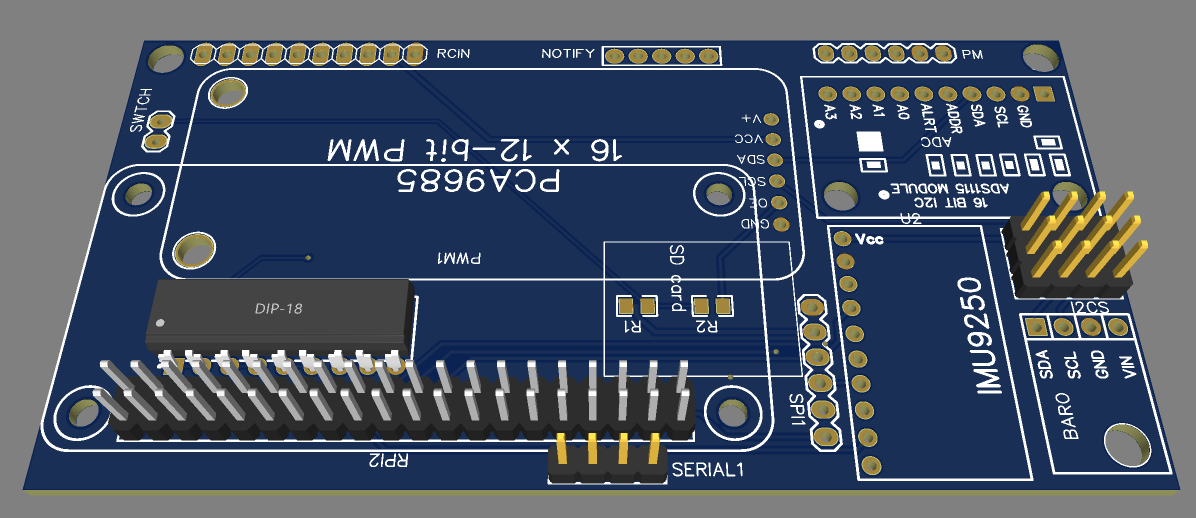
OBAL does not use any closed source code, or specialized drivers. It is all open and can be compiled from scratch. Also schematic and board are all published and available to access.
OBAL can be the start step for understanding Ardupilot Linux-based boards and for building more complex boards.
The vision is to provide that:
- Is a simple board that is easy to solder and assembled at home.
- Can be customized and upgraded easily.
- Acts as a developing and/or test platform to enable developers, engineer & hobbyist who are interested in understanding Ardupilot hardware/software.
- Complete Open-Source Hardware/Software and works on native Ardupilot code with no extra drivers.
Technical Specification
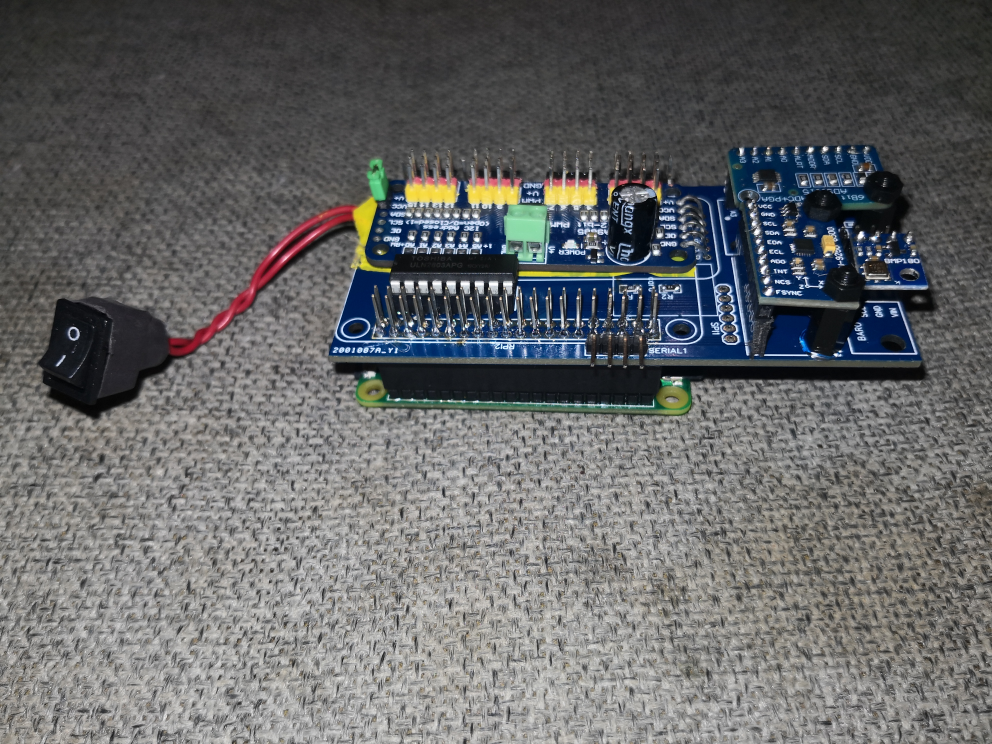
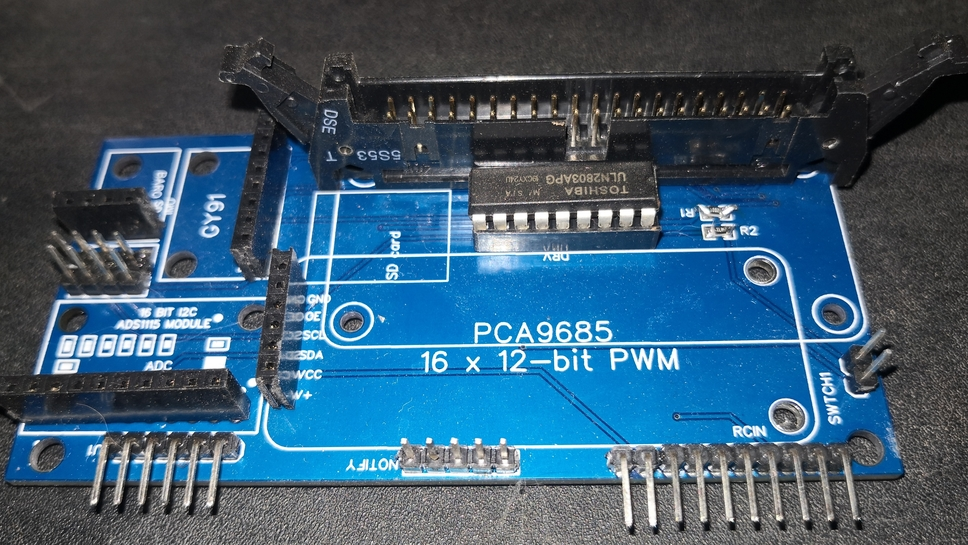
The board is simple and contains only necessary sensors with no redundant components. However extra SPI & I2C sockets are available to extend board capability and connect more sensors.
The board also has a safety switch that prevents the motors from turning on. The switch is connected directly to output and is not connected logically to Ardupilot so it is an external safety mechanism.
The board enabled users to make it at home with simple soldering techniques. It uses breakouts that are famous and available worldwide.
Only two SMD resistors are required and it is not that hard to solder.
Board Schematic is very simple and you can clone and update easily . Also the code is at this branch and is submitted to Ardupilot master code in this PR.
More about the board is in the following manual
Below are some videos for flying the board.
OBAL name is inspired by OPAL Stone where there are many colors and shapes. OBAL can be customized in many ways. I hope people can make updates, upgrades share the learning experience and have fun with Autopilot.