Hello
The Jetson will consume the power it needs, no more. You should use a power source that has more capacity than the consumer, hence the choice of a 3A UBEC that is within specs of the barrel connector.
Yes! I’m wondering how dose it perform with your odometry experiments? I’m planning to use it for object tracking with 3D localization of the object, but I’m not sure how well dose the stereo camera perform when the drone is 10-20 meters in the air.
Hello ppoirier!
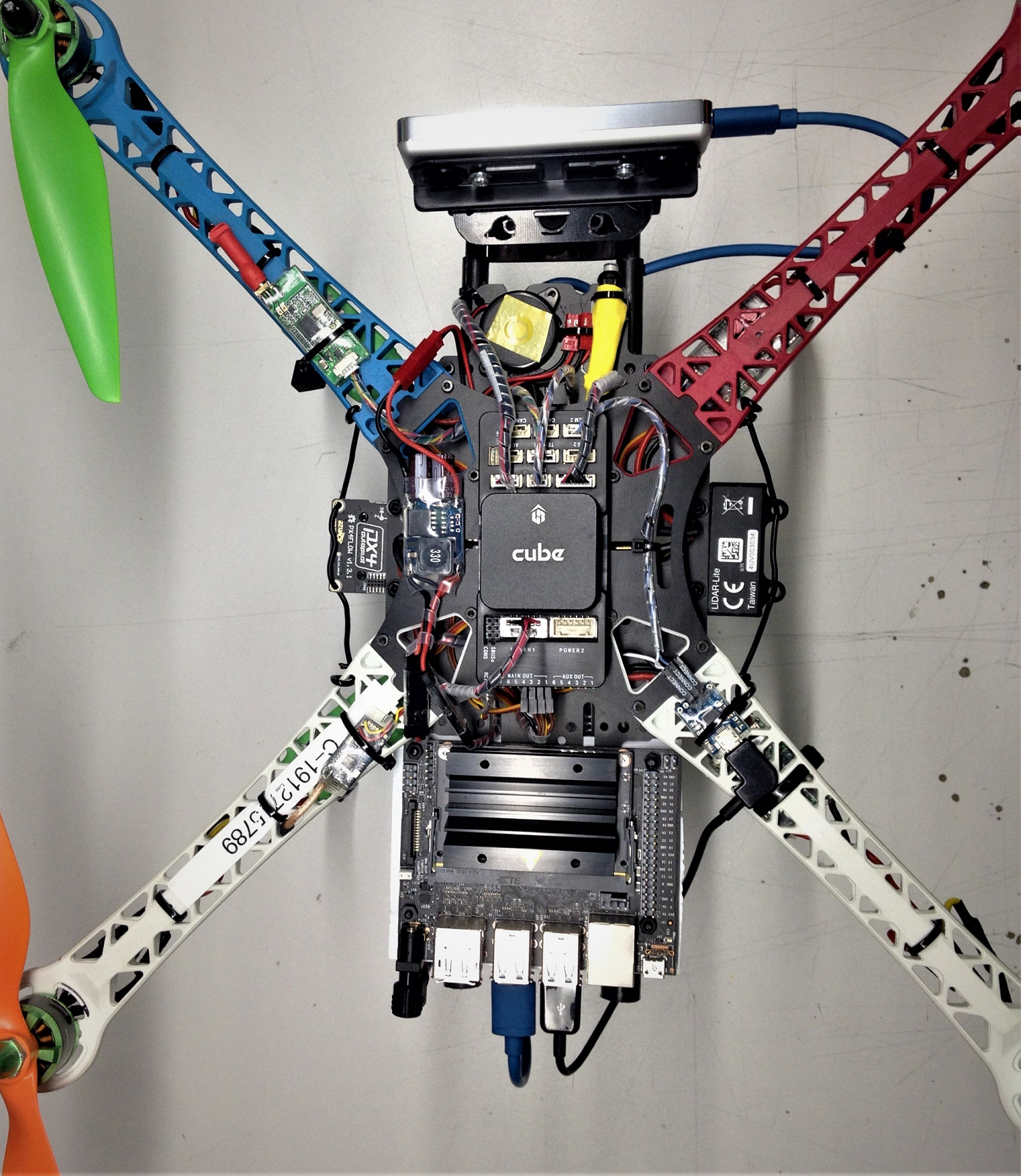
I’m making a similar type of drone. I’m using ZED 2i Stereo camera instead of Intel RealSense.
I’m totally new to this and need proper guidance and resources for understanding.
If there is any resources like video tutorials available, please share.
hello can i ask you a question? we have jetson nano and pixhawk. We want to make an AUV vehicle using them.
How do we communicate jetson nano and pixhawk? do you have a sample coding example?
if you just want to stream telemetry and video over tcp/ip stack then check out GitHub - sinamics/uavcast: ✈️ uav companion software ✈️, free open-source and supports arm/v7arm64amd64 computers which includes Jetson Nano.