hey there i am using Pixhawk cube orange with mini carrier board, t-motor mn6007 2 320kv customized motor, flame 70A esc, mf2211 propeller,27000 mAH 6 cell battery.
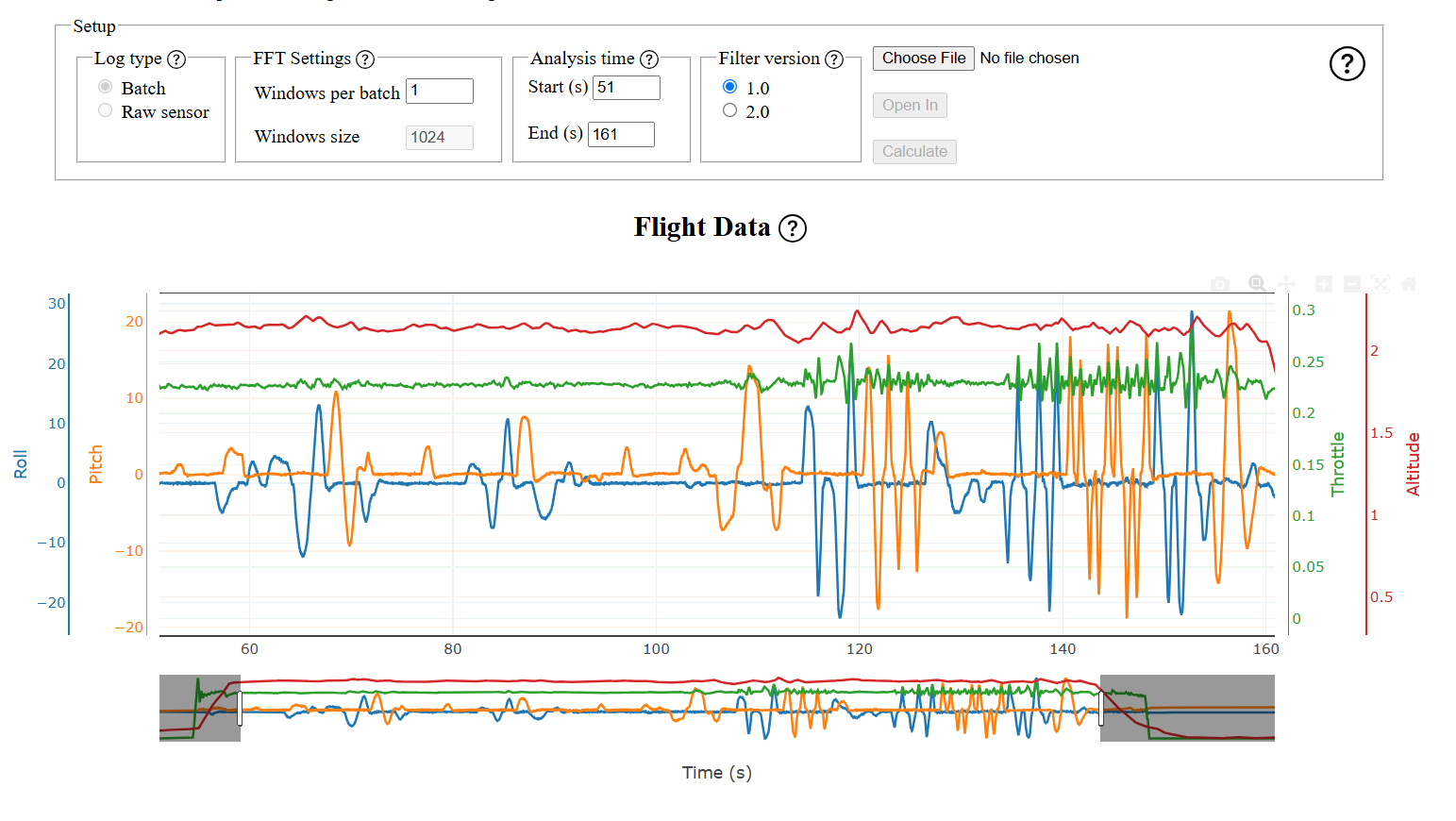
I am starting with tuning process in which i have came across a strange thing
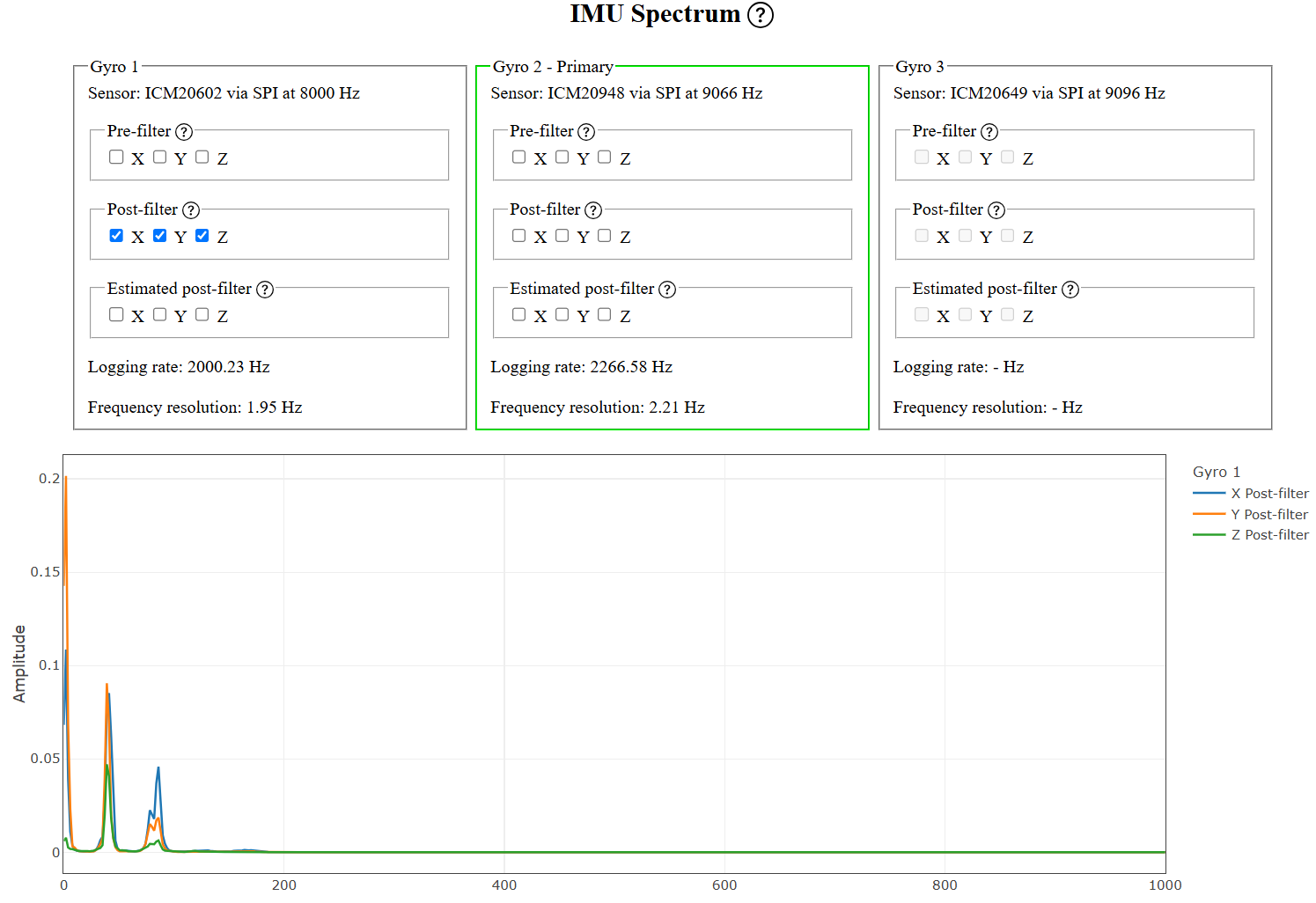
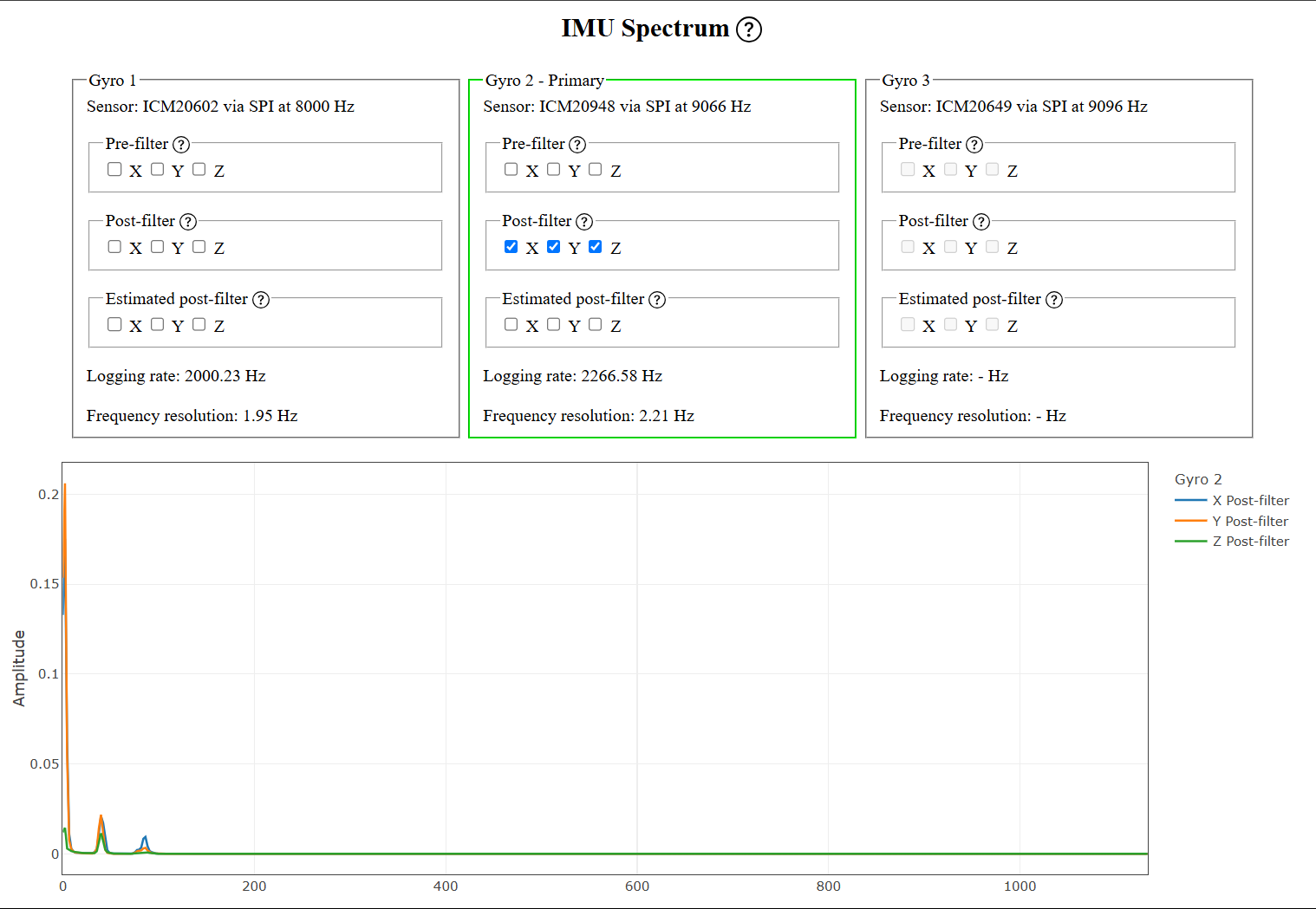
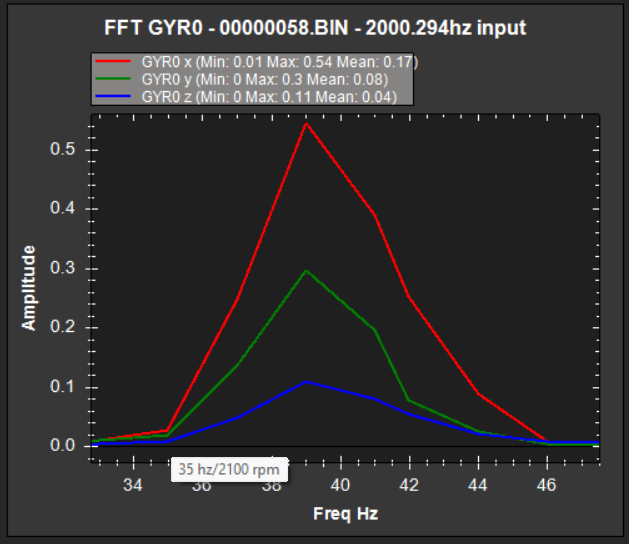
Pixhawk’s gyro1 and gyro2 is having significant amplitude change. Inside a single cube how is that possible ?
I have two formulae for INS_HNCTH_REF
1st: Directly enter value of CTUN->ThH from log file
2nd: INS_HNTCH_REF and/or INS_HNTC2_REF = hover_thrust * SQUARE(min_freq / hover_freq )
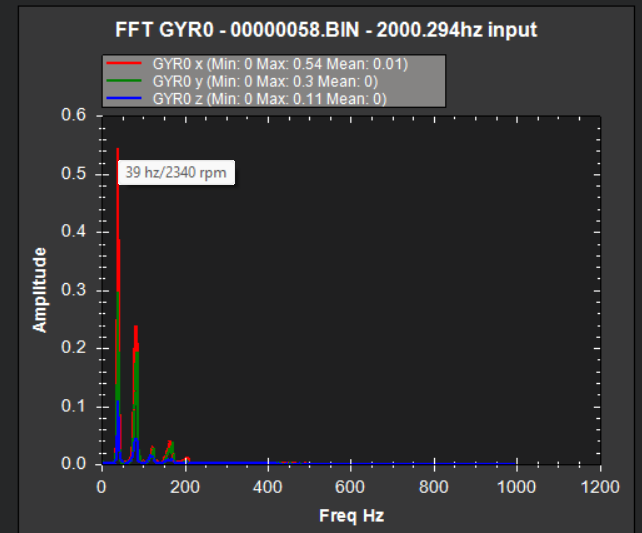
which formulae should i trust more ? in 1st method ref is 0.24 and from 2nd formulae value is 0.144 and as per filter value tool i am getting maximum attenuation at 0.21 reference value.
hover_thrust = MOT_THST_HOVER (after 30 second flight in ALT_HOLD mode)
hover_freq = hover noise frequency
min_freq = the minimum frequency that we wish the notch to track down to
i guess methodic configurator gives value of ins_hntch_ref. That’s really good and easy but if you can help with manual calculation by graph that will be something new to me.