With the FFT Analysis you can clearly see the improvements of the Amplitude in the bandwith of 50-90 Hz.
I had the Impression that the copter has flown als smoother, but this is only an Impression.
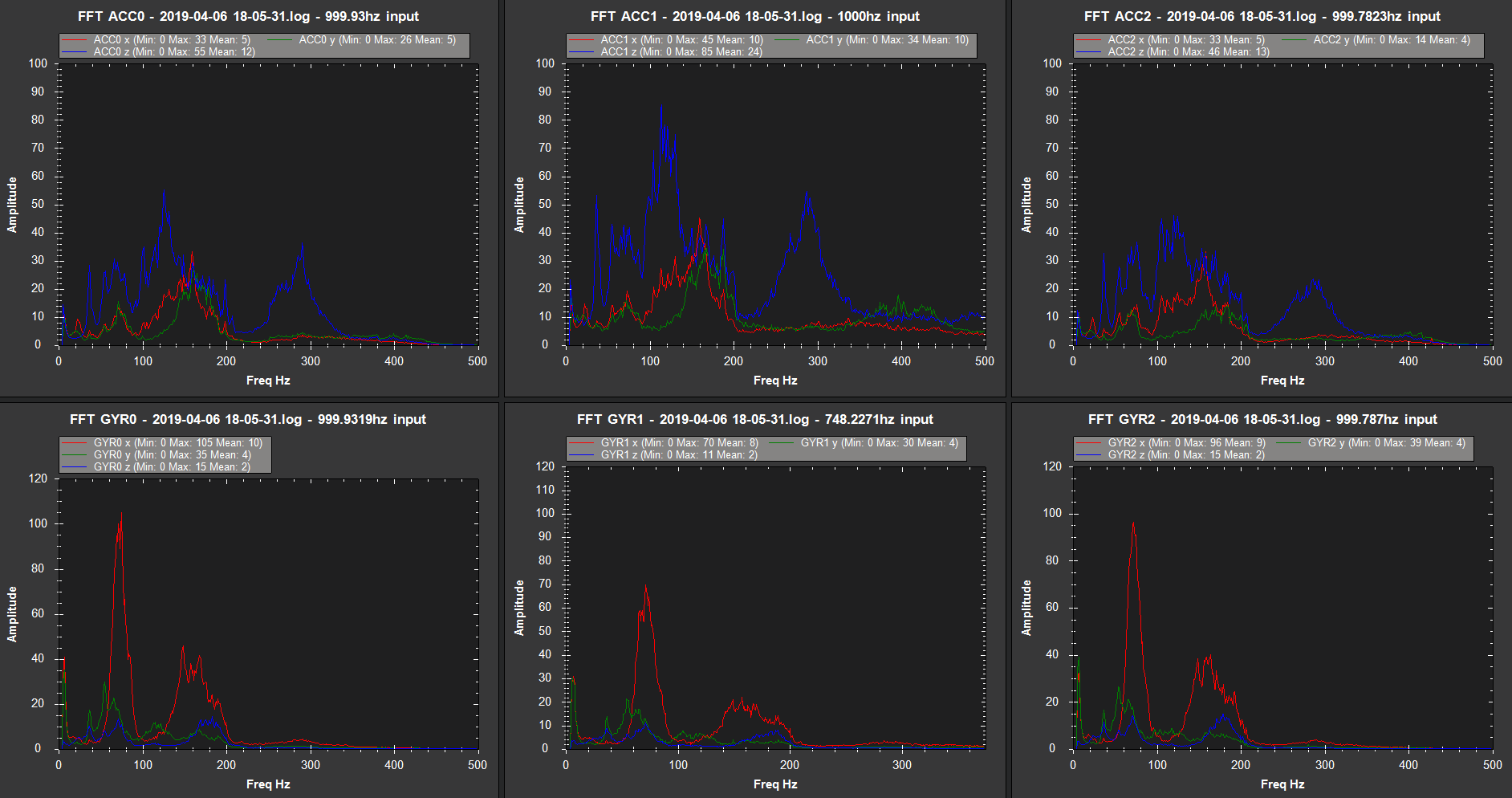
Without notch filter:
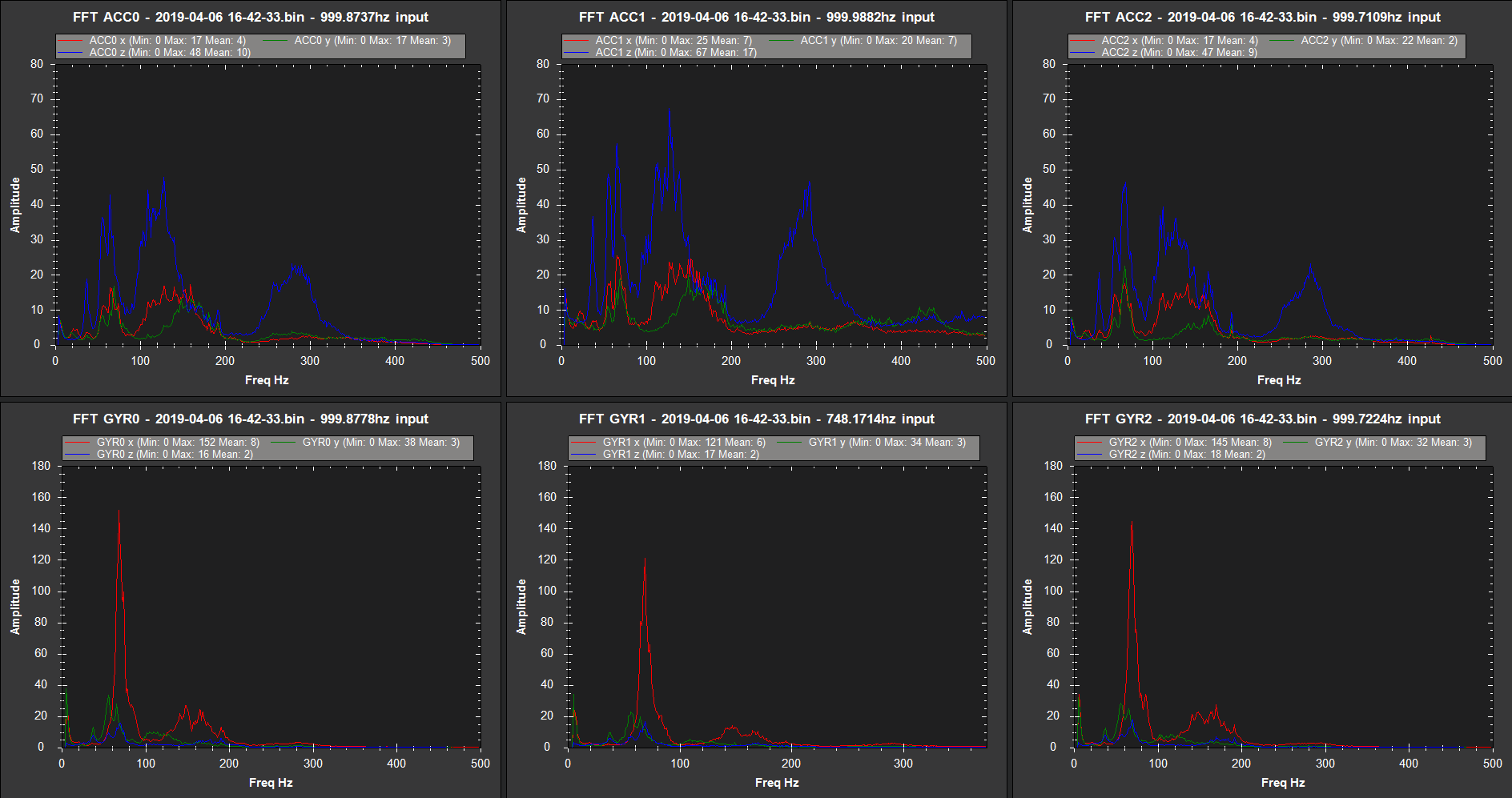
With notch filter:
INS_NOTCH_ATT 25
INS_NOTCH_BW 20
INS_NOTCH_FREQ 70