Just a tip, the two X8R antennas should be apart and ideally should have a 90 degree angle between them. You may run into problems later on with RSSI signal loss.

1 Like
4S Li Ion would normally be:
BATT_ARM_VOLT,12.70
BATT_CRT_VOLT,12.00
BATT_LOW_VOLT,12.40
MOT_BAT_VOLT_MAX,16.40
MOT_BAT_VOLT_MIN,11.20
unless you’ve got specific cells with manufactures data to determine other values.
I would use the stable firmware for all testing tuning. You can lock down the parameters and do the secure bootloader later.
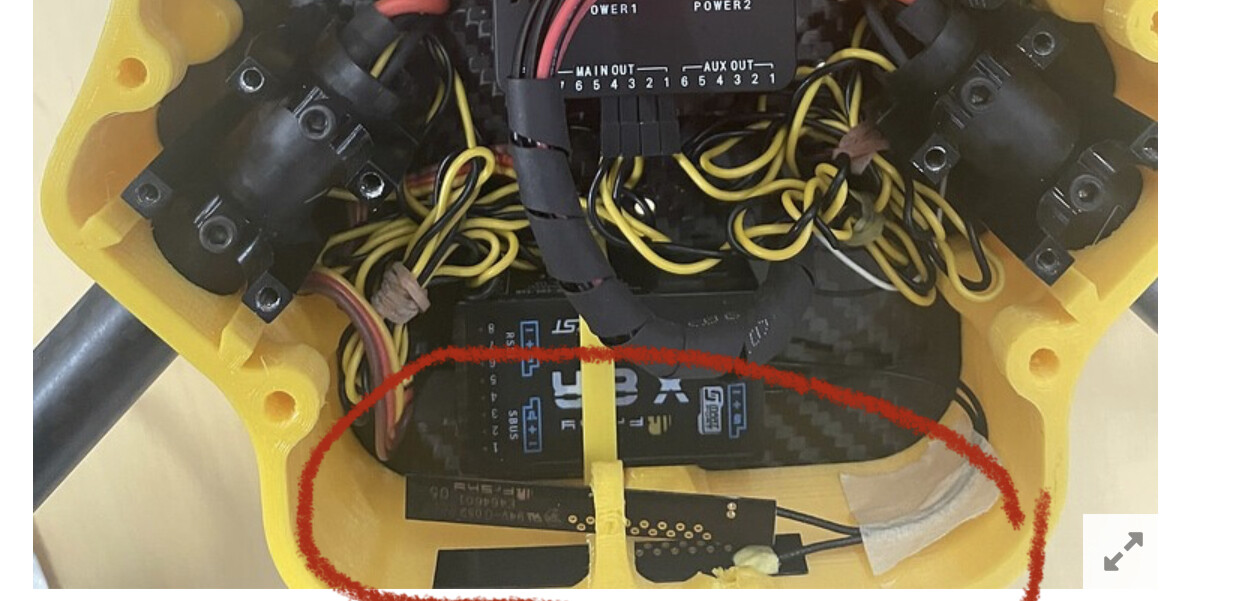
Make sure none of the spiral wrap is touching the flight controller or carrier board. Shorten and tidy up the motor wires.
And the RC antennas as Asim noted. You could even stick them vertically (maybe pointing down) on the outside of the body, one on each side of that corner so they are at 90 degrees.
Just use these harmonic notch filter settings, refined a little from earlier, but you seemed to disable some before running autotune.
INS_HNTCH_OPTS,0
INS_HNTC2_ENABLE,1
INS_HNTC2_MODE,0
INS_HNTC2_REF,0
INS_HNTC2_FREQ,49
INS_HNTC2_BW,20
INS_HNTC2_ATT,40
INS_HNTC2_HMNCS,3
If Autotune on roll axis produced reasonable results, I would copy the same values to pitch axis at least as a starting point for pitch autotune.
Hi @xfacta, We have finished manual tuning for now (Log) following your inputs. The Result is far better. IMU0 & IMU1 vibration is fine, but IMU2 providing repetitively high values(we decided not to consider IMU2).
Battery parameter also we have updated as per manufacturer guideline.
Thanks a lot for being with us ![]()
![]()
If further help is required for tuning/other, we will keep on updating.
You can use EK3_IMU_MASK,3 and INS_USE3,0 to ignore the non-damped IMU if there is absolutely no way to improve vibrations
I would run Autotune. Your manual tune might look OK flying in the air, but in logs you can see attitude control can be much better. If you don’t improve the attitude control it this will give you trouble in the long run.
As a starting point I would try:
ATC_ANG_PIT_P,7
ATC_ANG_RLL_P,7
ATC_RAT_PIT_D,0.005
ATC_RAT_PIT_I,0.100
ATC_RAT_PIT_P,0.100
ATC_RAT_RLL_D,0.005
ATC_RAT_RLL_I,0.100
ATC_RAT_RLL_P,0.100
Of course use caution and start in Stabilise mode
EDIT:
I ran your log through the latest harmonic notch filter tool and I think you can simplify to using this:
INS_HNTCH_FREQ,55
INS_HNTCH_BW,25
INS_HNTCH_OPTS,16
INS_HNTC2_ENABLE,1
INS_HNTC2_FREQ,93
INS_HNTC2_BW,30
INS_HNTC2_HMNCS,3
You will benefit from fixing the phsyical vibration and resonance issues, then the filter settings can be further simplified.
Shorten these cables. They create a small electromagnetic field and they are next to your receiver and Cube. All these little things start to add up fast.

1 Like
Yes Asim, This issue is fixed.
Yaa, You are right. We were slightly facing same after long run. For that definitely going to implement this tips:
&
updating after another test flight.
Thank You
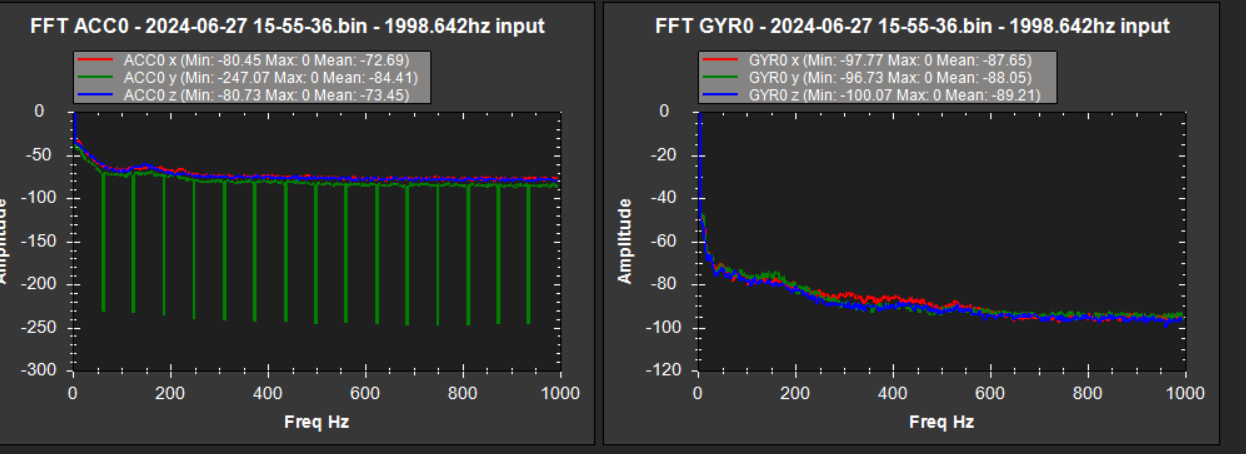
I have 5 inches propellers and my drone is too small still it starts vibrating the minute it is lifted up in the air or even starts to lift up in the air. It has this issue as shown in the graph at multiple of 60 to 62 Hz coming down to the amplitude of -231. What to do? I have even applied the notch filter already, still its not working properly and vibrating the same way even if the chasis is totally fine and has no reason of vibration in it.
Post a link to a .bin flight log. Most likely a tuning problem.
https://drive.google.com/drive/folders/1RIETX3IuvnNm7skIi9cq0mpSg-n93-w5?usp=sharing
Here’s the link for the log data.
A 5" will not fly on default PID’s and I’m not sure what you were trying to do with the PSC_ACCZ parameters but they are not correct. The outputs are oscillating badly. In any case go here and start the configuration process from default:
The Configurator
As this has nothing to do with the notch filter if you have further questions start a new thread.
Ok thank you so much