I have a few questions about how I should go about setting up the harmonic notch filters in ardupilot. I have read through all the documentation on it but I just wanted to be certain before I move forward since crashing this particular drone is not an option for me.
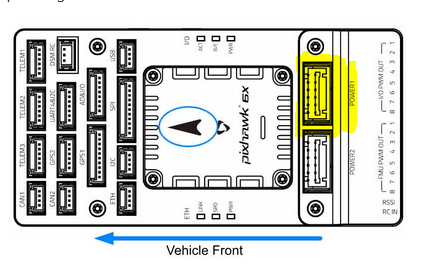
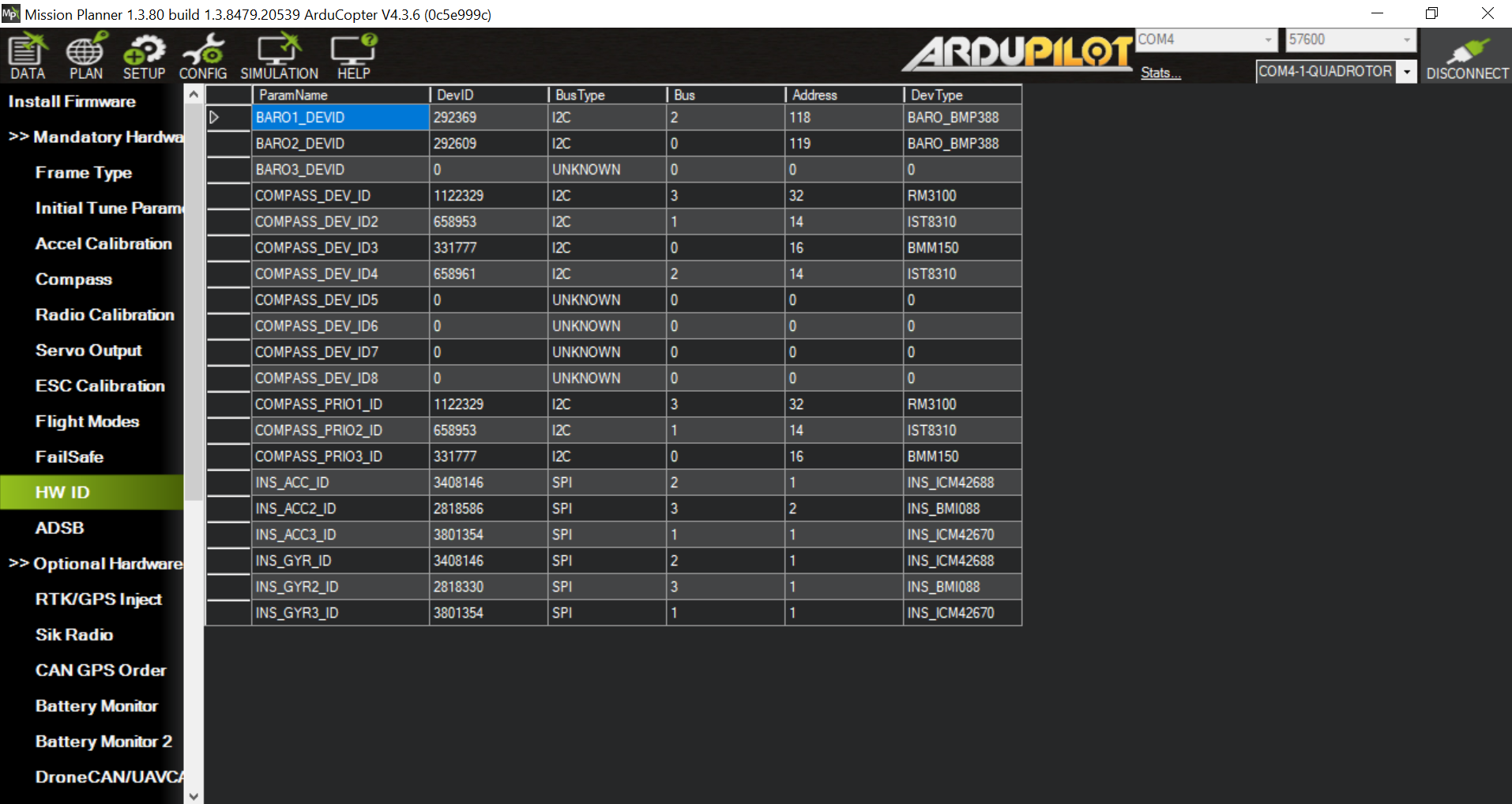
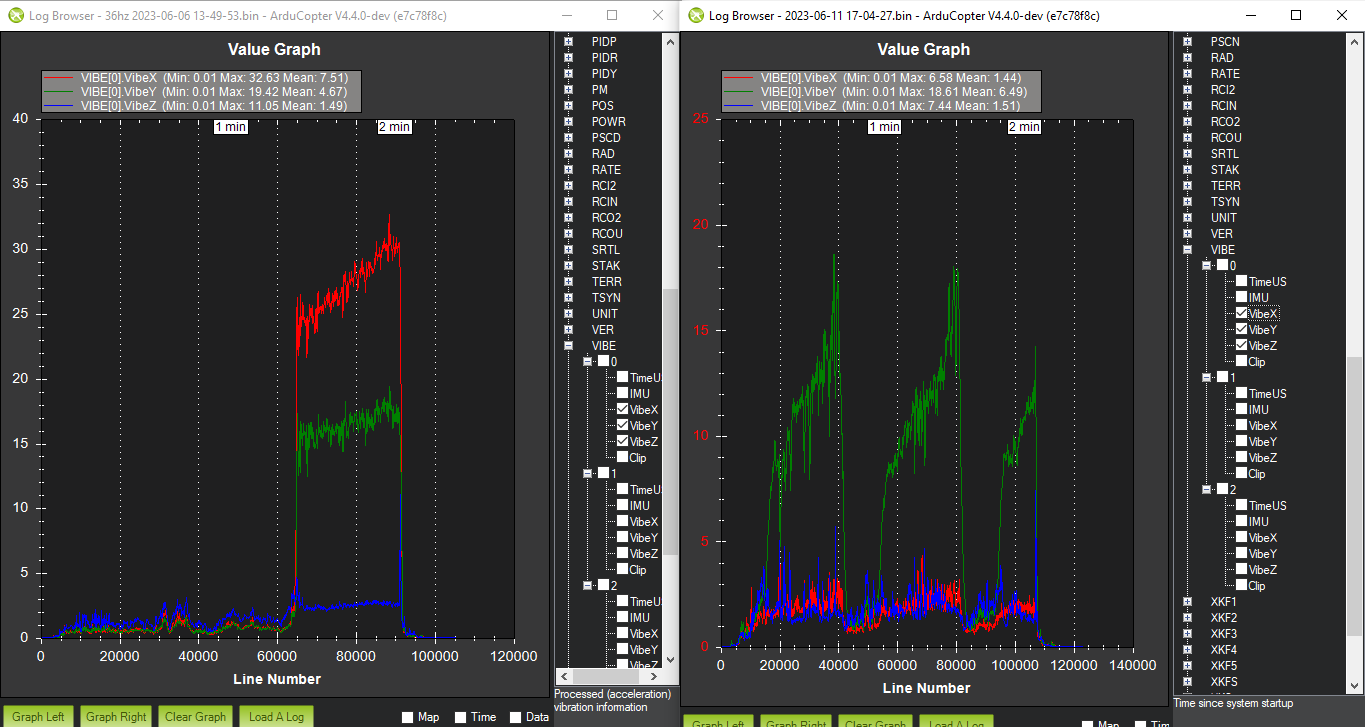
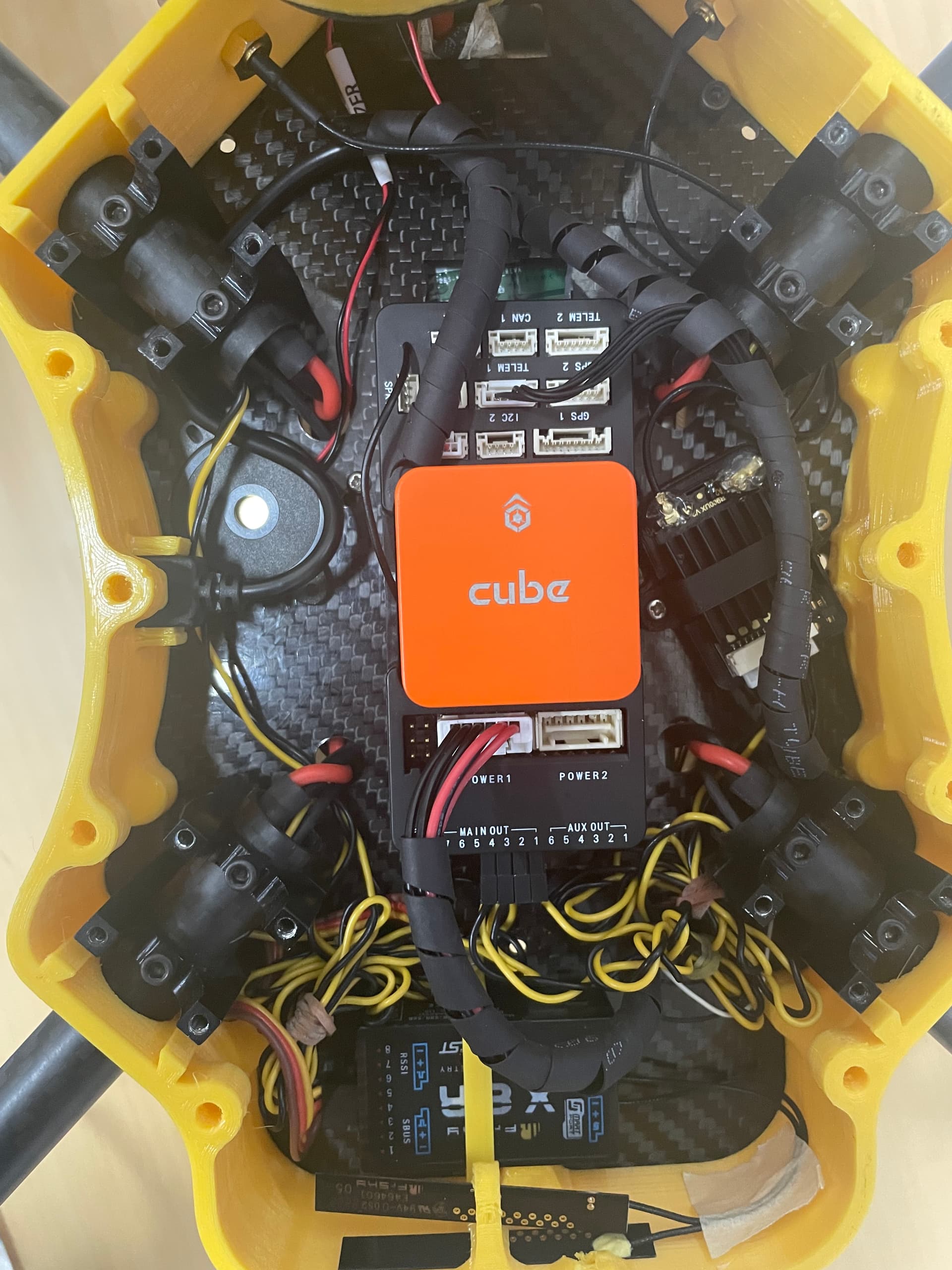
I am currently in the process of tuning a large quad rotor that will eventually be a gas hybrid platform. It has about 43in props and the flight controller is a pixhawk 6x. Due to the high vibrations I anticipate, the Pixhawk is mounted in a similar fashion as in this tutorial. The vibrations do seem low so I believe that is working but the engine is not currently running.
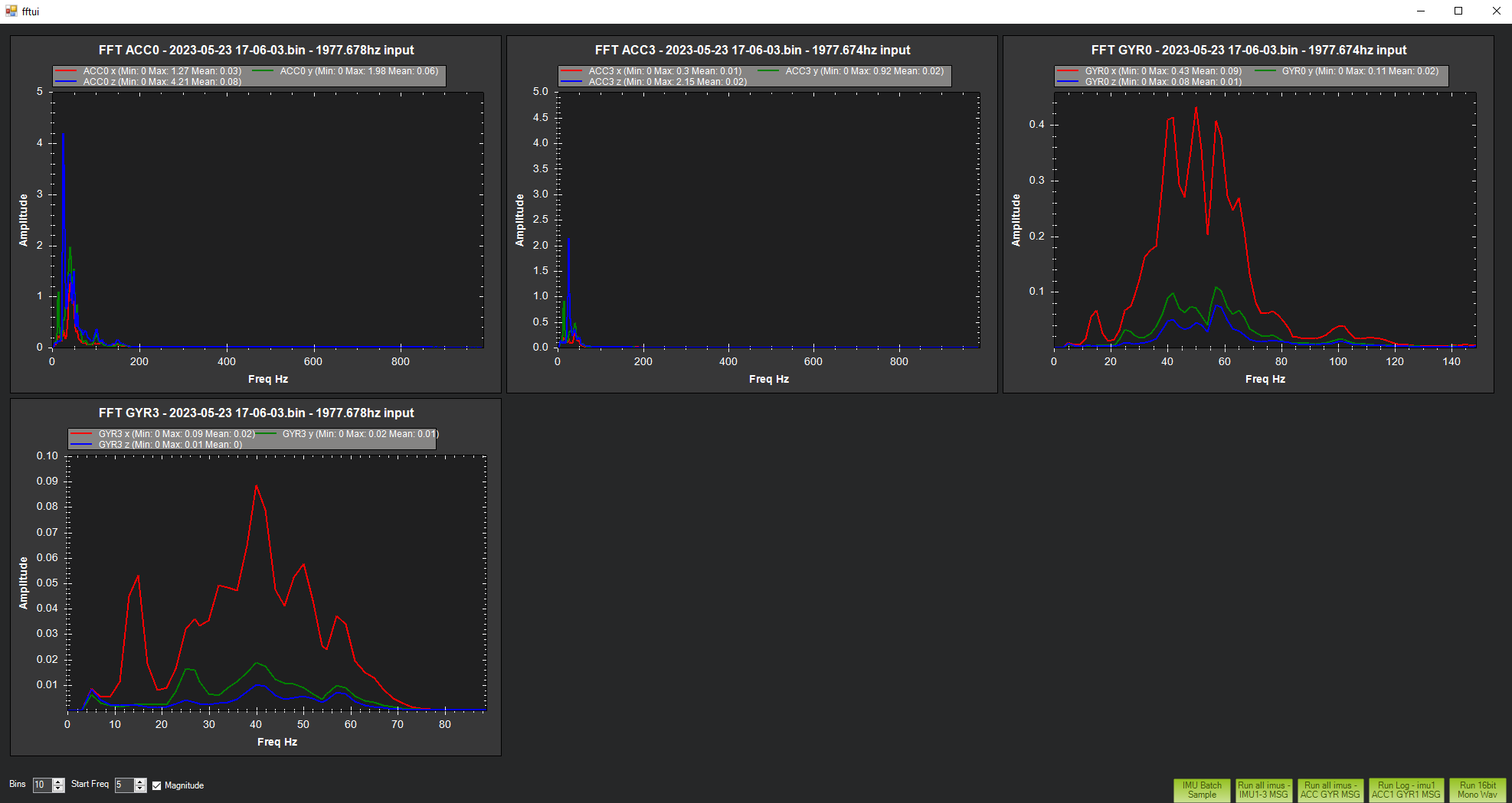
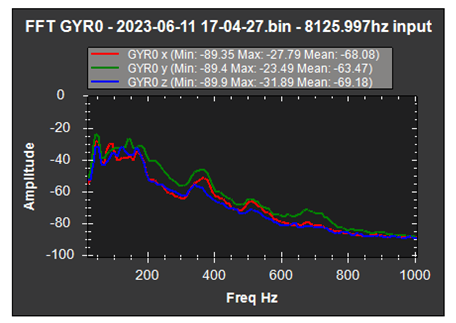
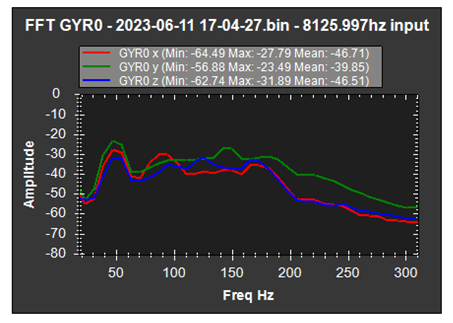
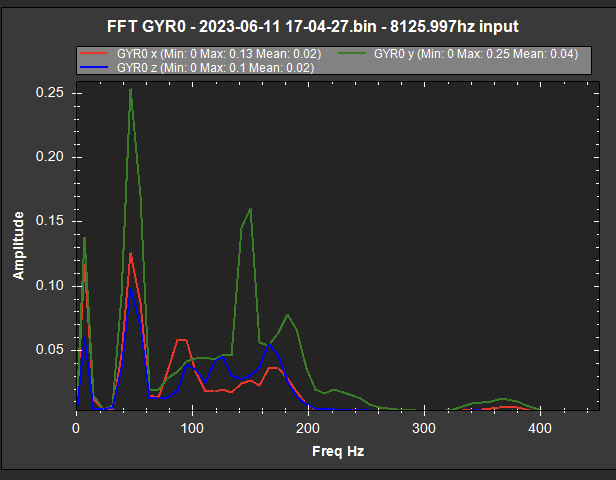
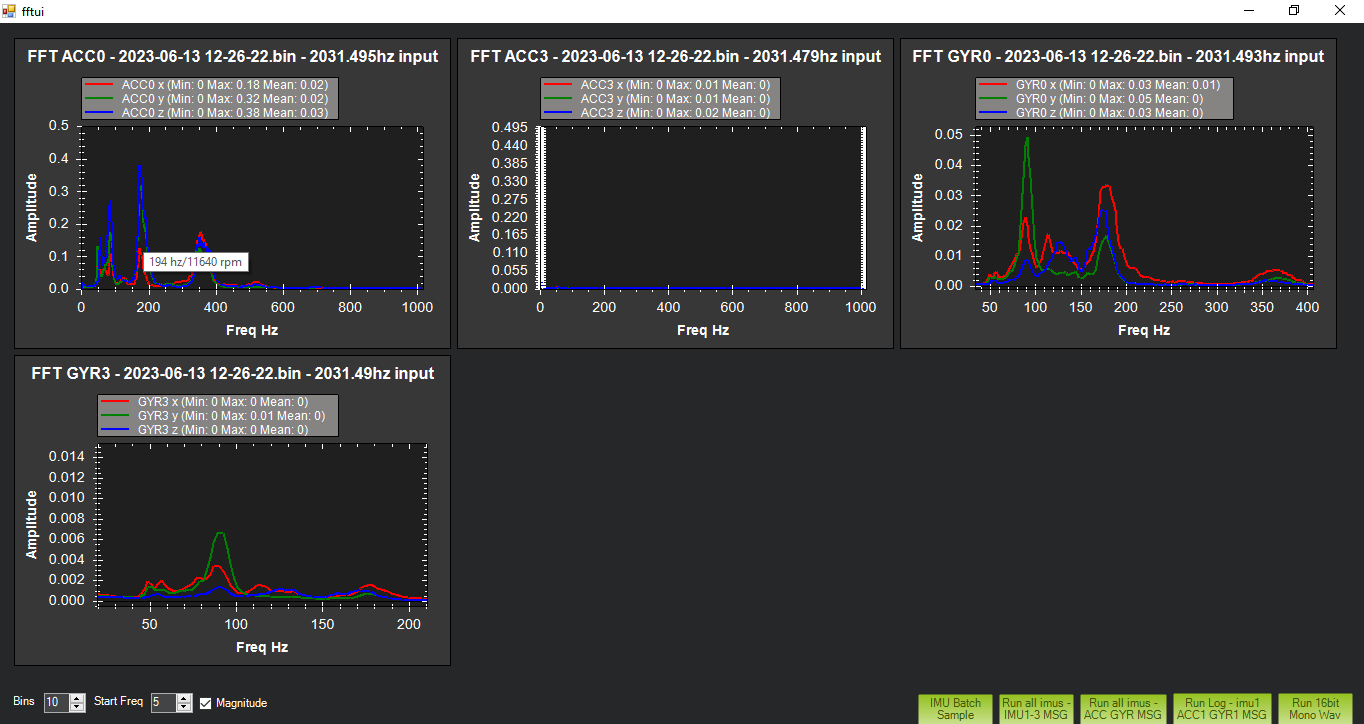
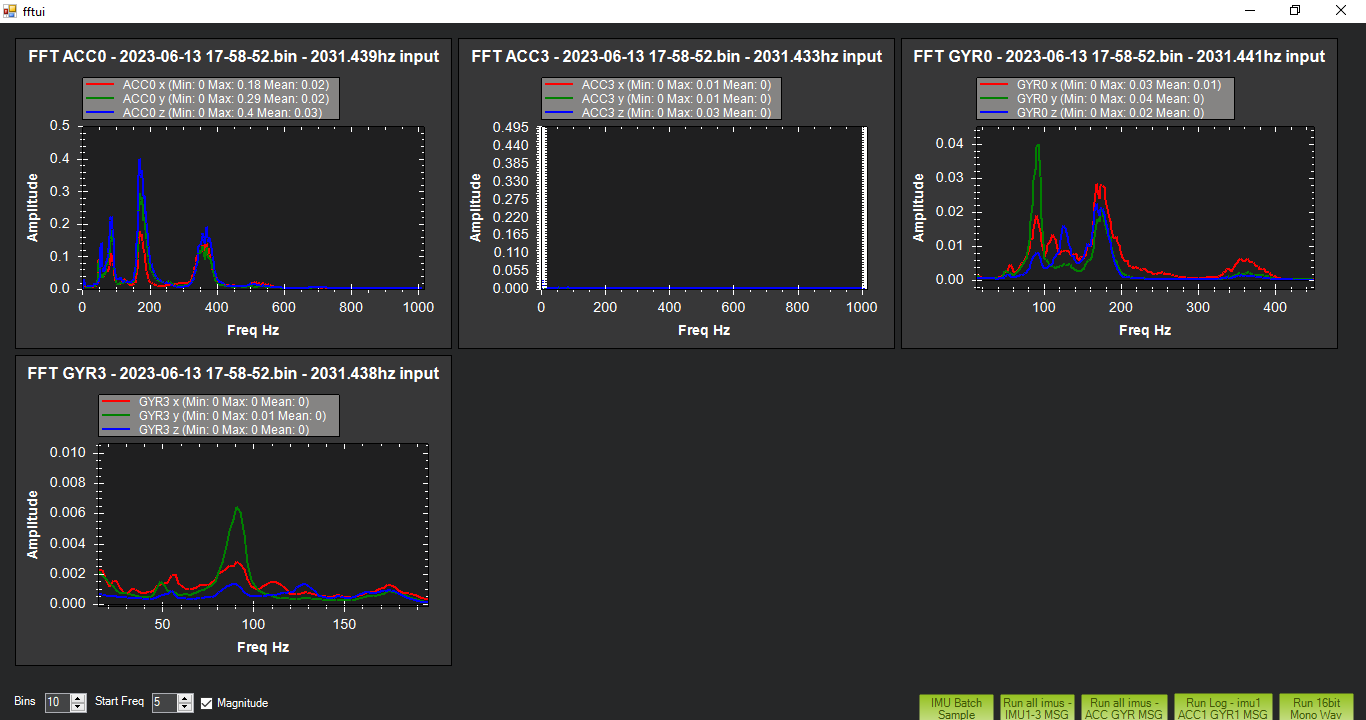
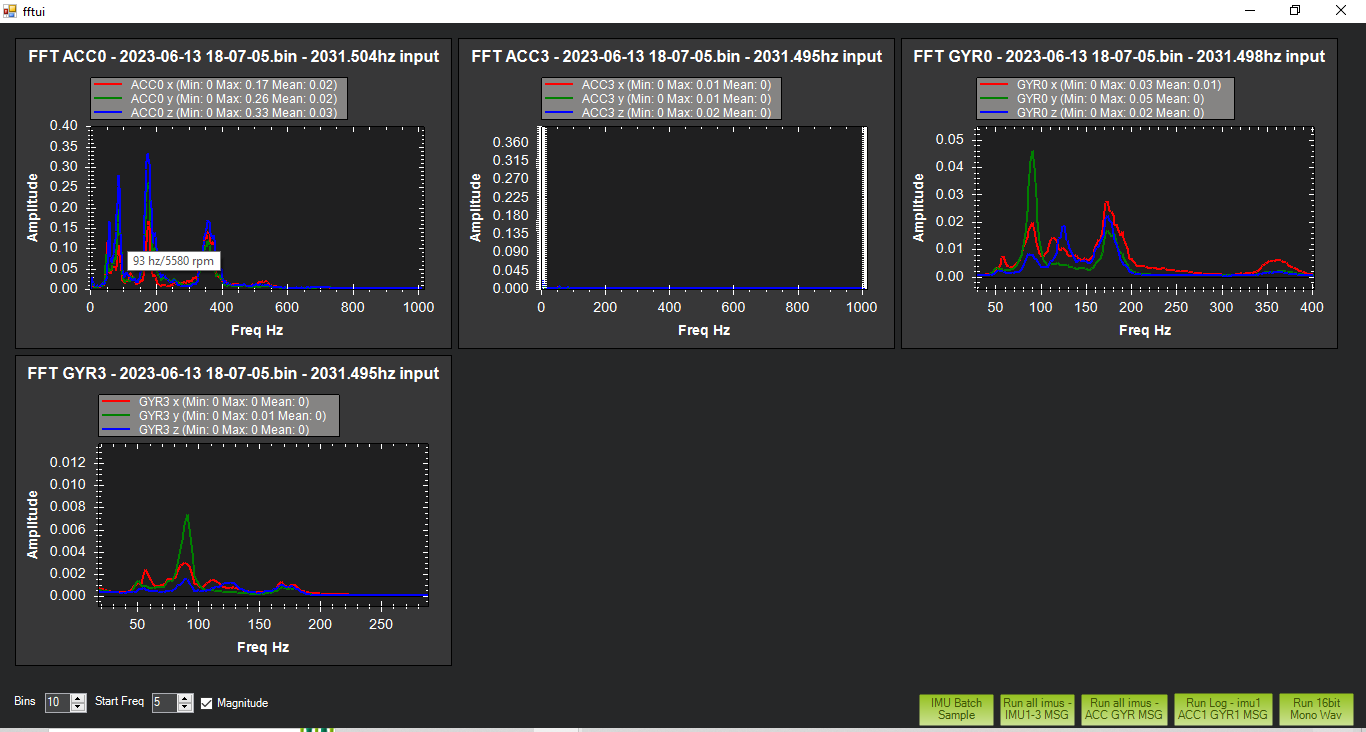
In regards to the notch filter I would like to set that up before I continue tuning but after downloading the logs the graphs look like this:
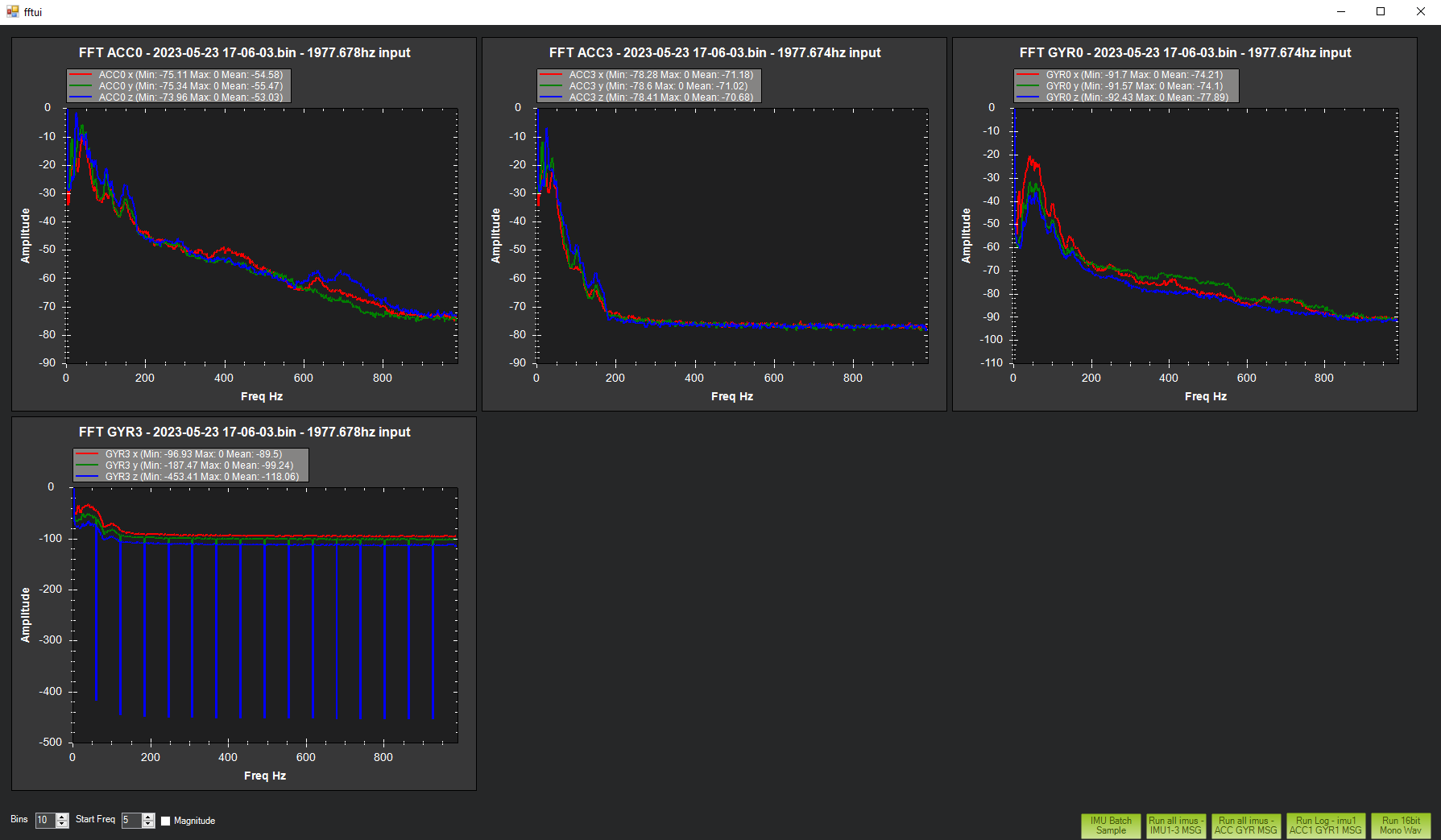
There are very strange lines coming down off the GYR0 plot and I am not sure if this is a cause for concern so I was hoping I could get some clarity on that. My main question is what should the centering frequency be set to when the GYR0 and GYR3 plots center at slightly different peaks (40hz and 55hz)? Also on the GYR3 graph there is a small peak at 100hz after the main peak, would it be worth it to set up a second notch for that? I’ve read that setting up a double notch can be counter productive. There is also a noticeable separation between the three lines and I am not sure if that is normal as well.
The tune is still quite poor but that is a work in progress, if you had any suggestions on how I should adjust the tune I’m all ears. I have been against using autotune since I’ve had a bad experience with it a few years back.
Thanks for all your help I really appreciate it!
Log file can be found here
")