As can be seen from the logs given below, after taking the water from the pool, the drone cannot rise while trying to rise autonomously in guided mode and loses its balance to a great extent. When we pull the mode from the remote to althold mode and take control, it finds its balance and becomes stable. When we fill the chamber under the UAV and assign an autonomous task in guided mode, we do not have any problems. Our problem is not being able to take water from the pool and rise autonomously. We could not find the source of the problem and wanted to consult you, we would be very happy if you can help.
Hi,
how much weight would you say your UAV is taking in this phase ?
Here is my hypothesis :
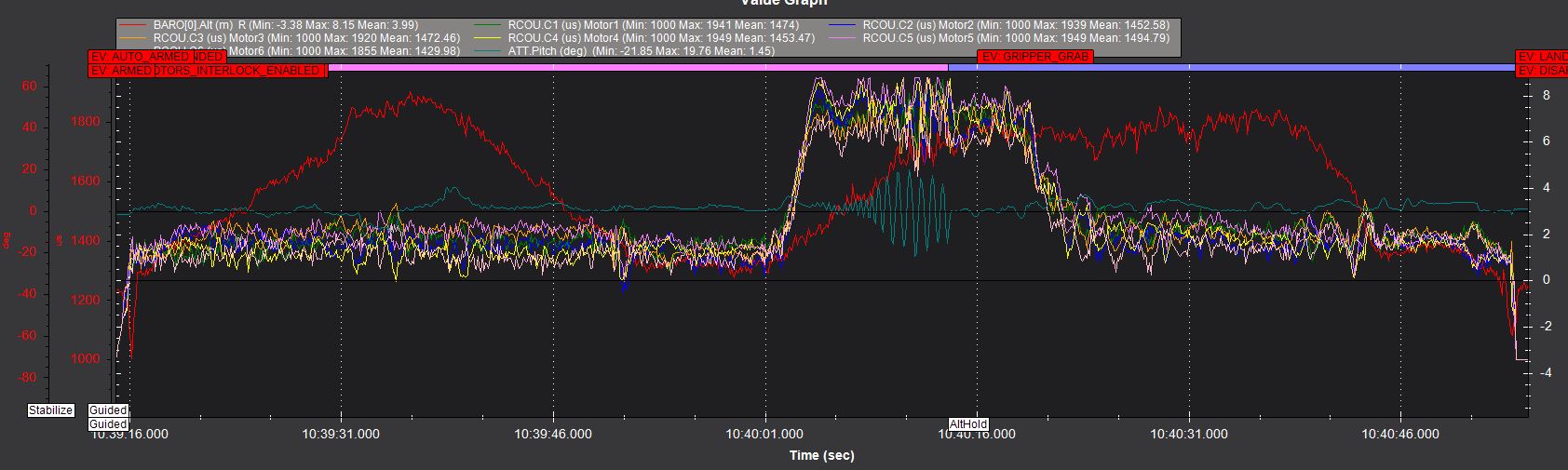
Judging by the comparison between DesiredRoll and Roll, I would say your PID tuning is not robust enough to maintain level and position while increasing the drone’s payload. It would seem that ATC_ROLL_P parameter is a bit too high, causing oscillations when the drone tries to stay stable in guided mode.
When switching to AltHod mode, the drone does not try to hold its position anymore, which will soften the oscillations (i guess).
The UAV carries approximately 5L. Your hypothesis made sense, but when we fill the water with our own hands and do not take it from the pool, it carries it in a healthy way with the same PID. what do you think about this?
Yes, on this flight. We take off in Guided mode. Then we go to the top of the pool and descend. We take about 5L of water from the pool and then try to rise, the drone enters an ever-increasing sway. Finally, I switch to althold mode, I land.
But when we fill the chamber with our own hands and then take off, the drone can take off and goes to the coordinate it needs to enter.
Ok, there are a couple problems here. The first is you have not provided a log that clearly demonstrates the problem. This is why people are struggling to help you.
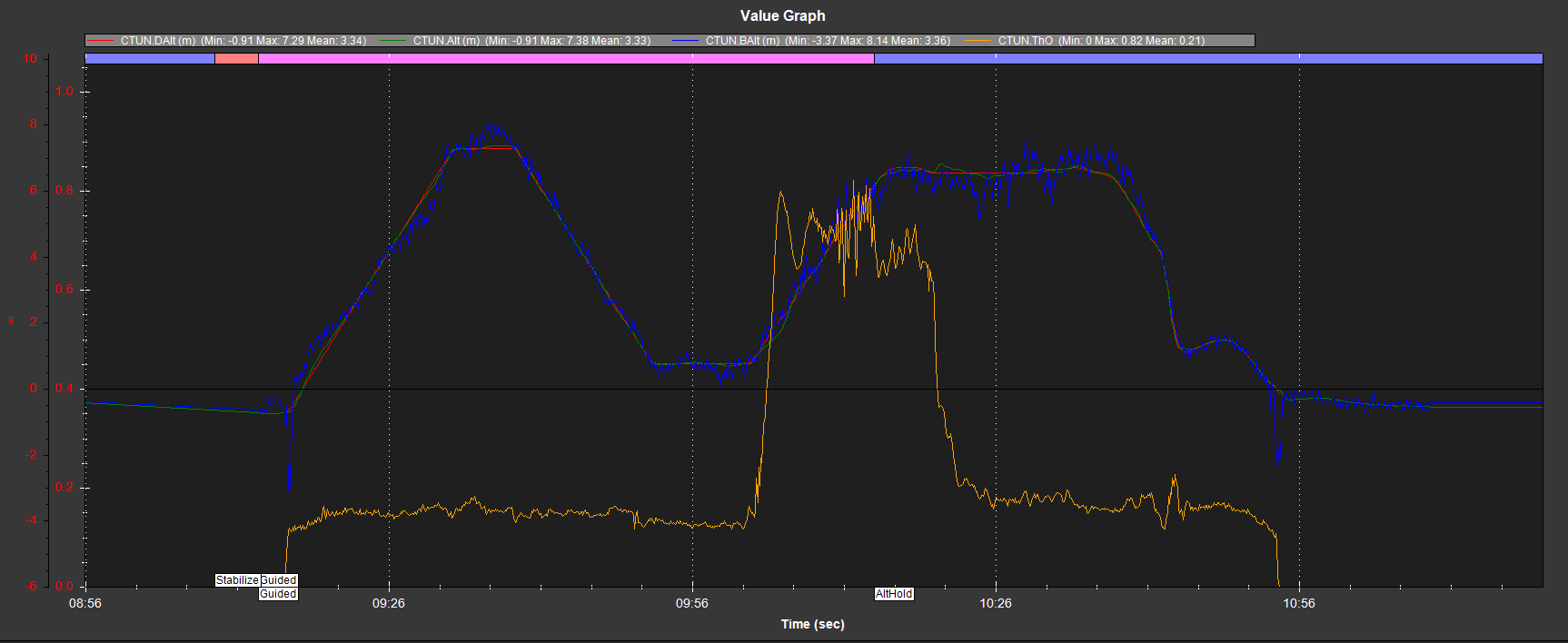
The log you provide does not show a clear point in guided mode where the aircraft is attempting to climb but is unable to. All we can assume is that just before you switch to Alt_Hold is where you are unable to climb or you see the aircraft start to struggle to climb.
As you can see from the graph it looks like the aircraft is climbing when you switch. A video would have helped.
So you have a couple problems.
Your aircraft is poorly tuned so that the position controller starts to oscillate when trying to lift the load. This looks like a position controller problem, not an attitude controller problem.
To address this I would suggest dropping your PSC_blabla_XY P, I and D terms by 50% and see how you go.
The second problem is you have poor yaw authority (as many quads do) and combined with your high yaw pid settings you are loosing a lot of thrust to yaw.
The third problem is your aircraft lacks thrust for the task you are attempting to do. So unless you get everything right the aircraft will be unable to lift the load.
Finally you may be getting some sort of height estimation problem. I can’t see anything that suggests this in the logs but your description doesn’t appear to match what happens in the log.