Hello everyone.
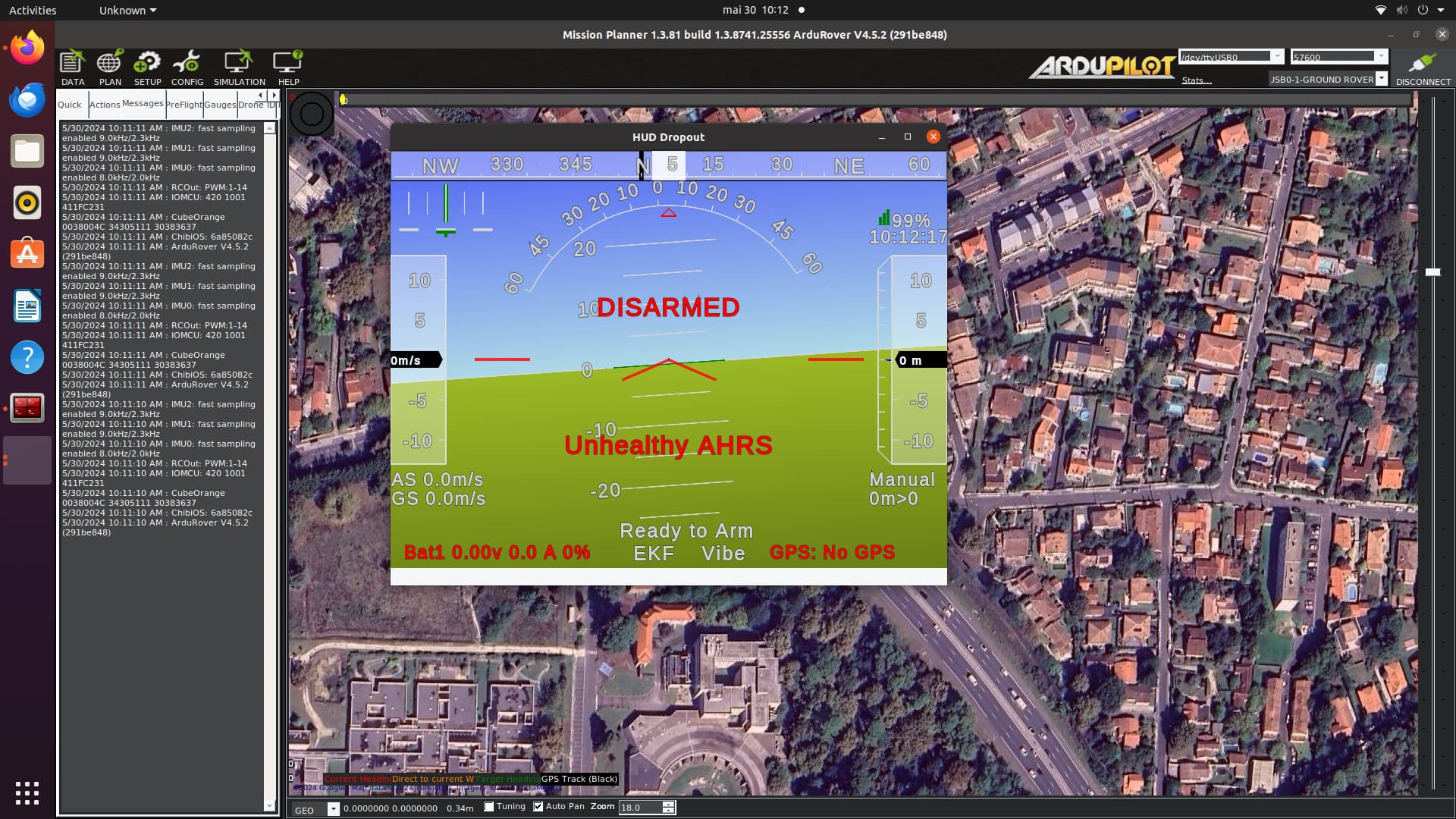
I am working on a Rover (car steering), I can force arming but I have no GPS position, unhealthy AHRS and a battery error message… I am working with a cubeorange, my telemetry is linked to the port TELEM1, my GPS H-RTK F9P linked to the port GPS 2.
I let you my parameters files here :
my_rover_param.param (14.3 KB)
If someone knows where I have to change my parameters to be able to have a good configuration of my rover, please help me ![]()