In our project, we assembled a drone with:
6x Turnigy Multistar 4225-610Kv 16Pole Multi-Rotor Outrunner
6x 13x4 propellers
6x Aerostar 50A ESC
1x Cube Orange
1x CubePilot Power Brick Mini Soldered
1x 14.8 (4s) 10000mAh Lipo battery
and other GPS, radio, etc.
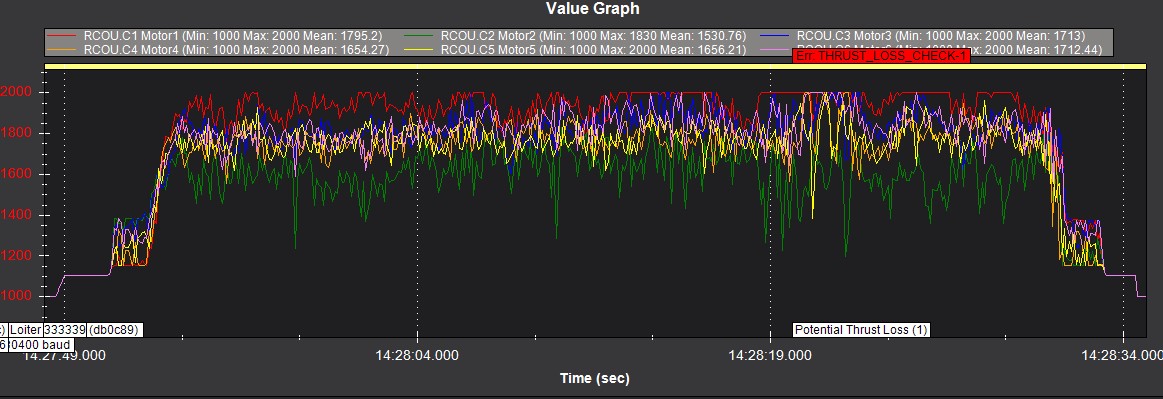
However, during the testing flights, we had a total take-off weight of 6kg, and it showed a thrust loss error after one and a half minutes without the battery getting too low. Based on the specs provided by the motor vendors (https://hobbyking.com/en_us/turnigy-multistar-4225-610kv-16pole-multi-rotor-outrunner.html), it should produce about twice the thrust force needed.
We also reduced our take-off weight to 5kg and it showed the error after about 5mins with 15% battery left. We think it means the current drawn by each motor is about 17A (85%10000mAh60min/5min/6 = 17A), but it didn’t produce the corresponding thrust as it should. One of the possibilities we are thinking of is just the provided specs are not correct, but we would like to hear some comments before we head to buy new motors.
This craft is grossly underpowered with a predicted Hover throttle of ~74% and thrust to weight of 1.3:1 (at 6kg) With 6S battery power it would be about right at the same weight assuming the components could handle it. And you need current logging.
edit: assuming you increase the T/W, but it is still less than 2. the current hover throttle is practically unusable. unless you have some vtol plane, even then its gonna b real janky.
nice. assuming the pic above is of steady hover, it seems that you also have a massive attitude imbalance. might be roll + pitch imba. something to consider in your rebuild.