I am trying to set up notch filters to filter out noises of gyro data and I faced with the issue that not all noises are filtered out properly.
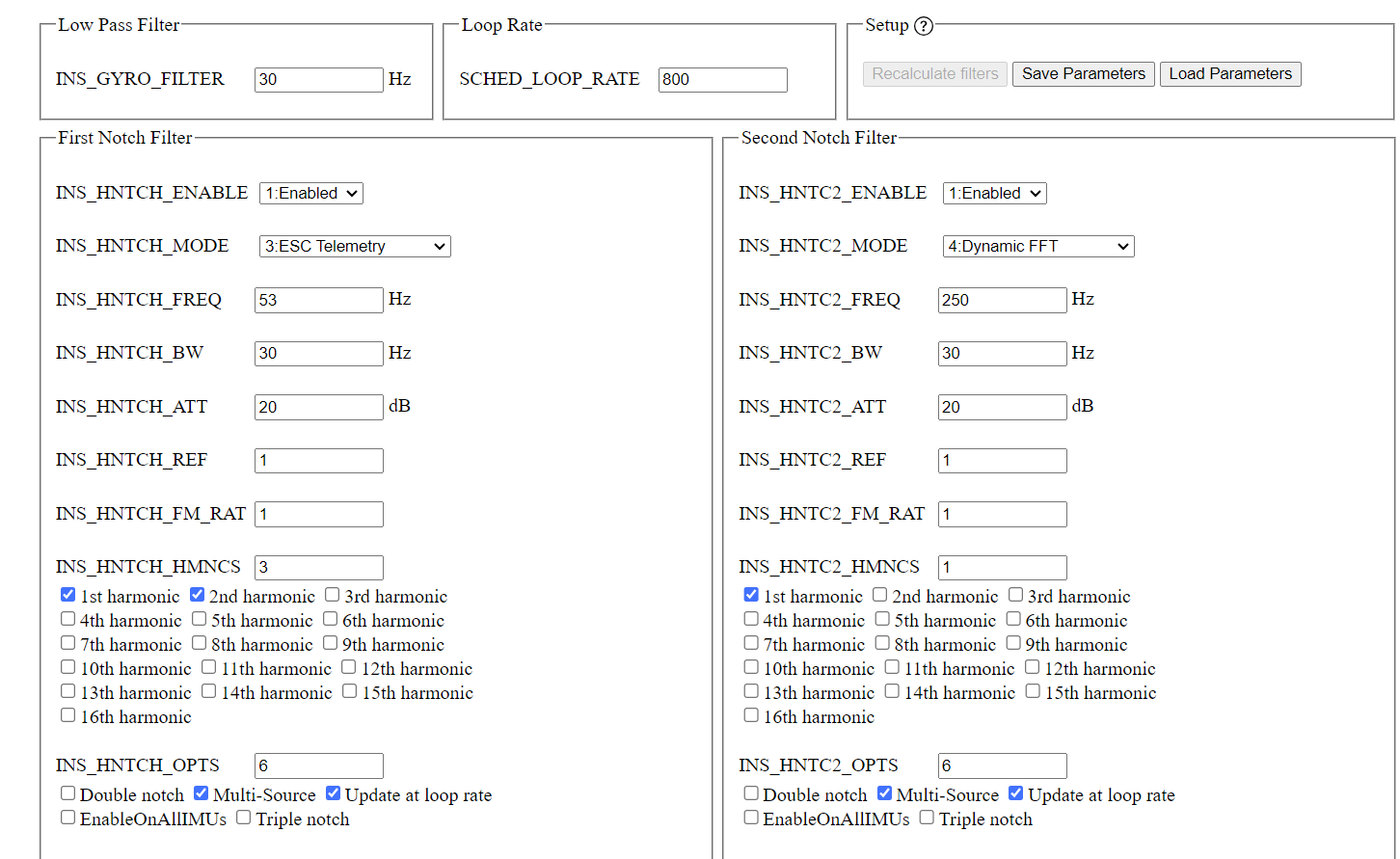
As an example, with this notch filter’s configuration:
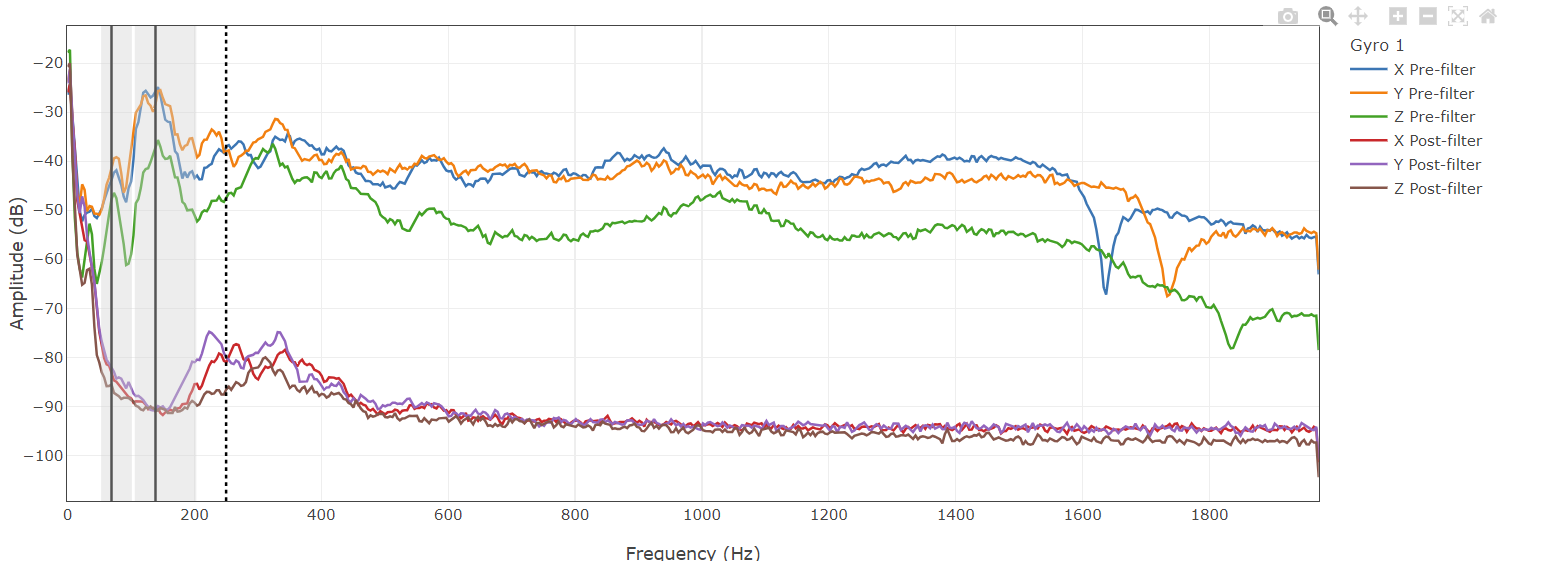
Fundamental and its first harmonic are filtered out as expected from the first notch filter setup. But I would also expect that my second-notch filter(based on FFT) should identify and filter out noises starting from 230 Hz, but as far as I can see that is not happening. So, where am I wrong? Why does the FFT notch filter not identify noises around 230 Hz?
This is the log file that I used for analysis: logs
Thanks for your reply)
Could you please explain why BW equals to 30 is too big for multisource, because I did not find any information on Ardupilot wiki that could explain that? Also how do you know that -80dB is irrelevant noise? Is it always irrelevant noise for all copters or maybe, there are some criteria, that can be used to identify that?
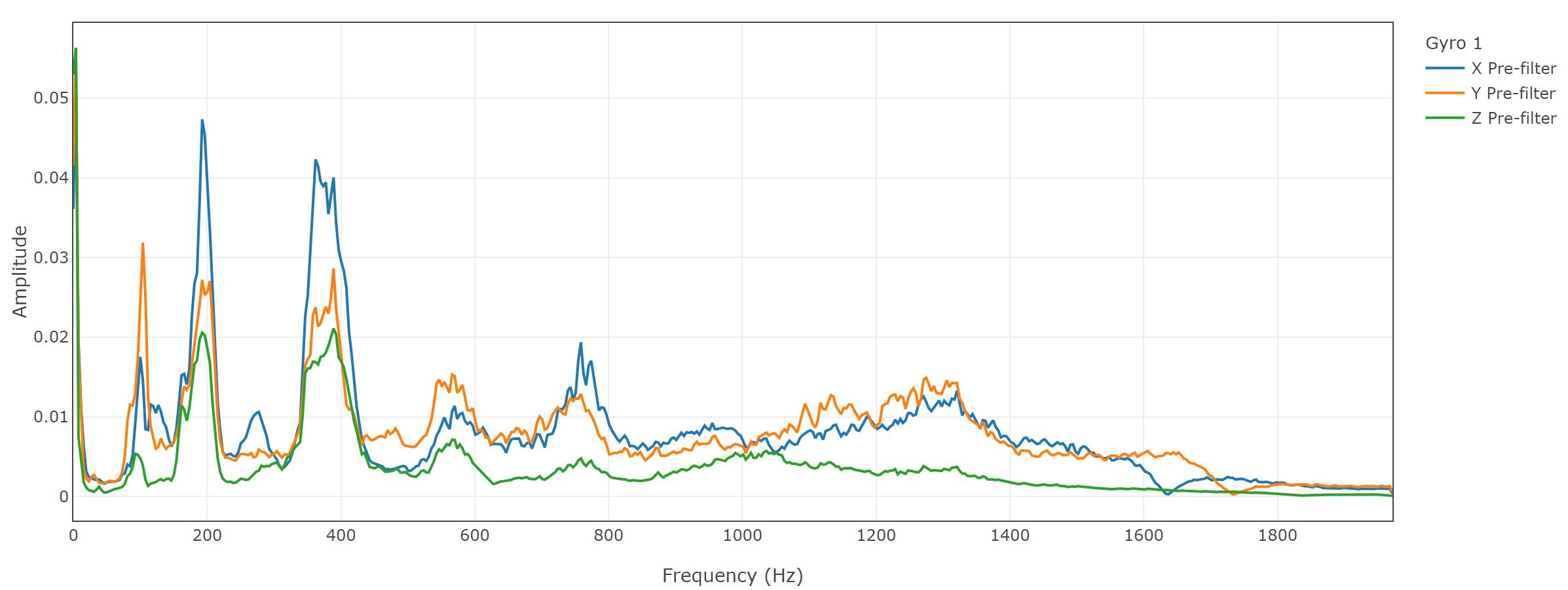
It would be great if you could look at my logs. I changed BW to 20 and disabled a second notch filter as amilcarlucas advised me, but noises around 365 Hz becomes greater than -80dB. Does that mean that now I need to add again a second notch to handle noise around 365 Hz? This is a log file that I used for analysis - logs
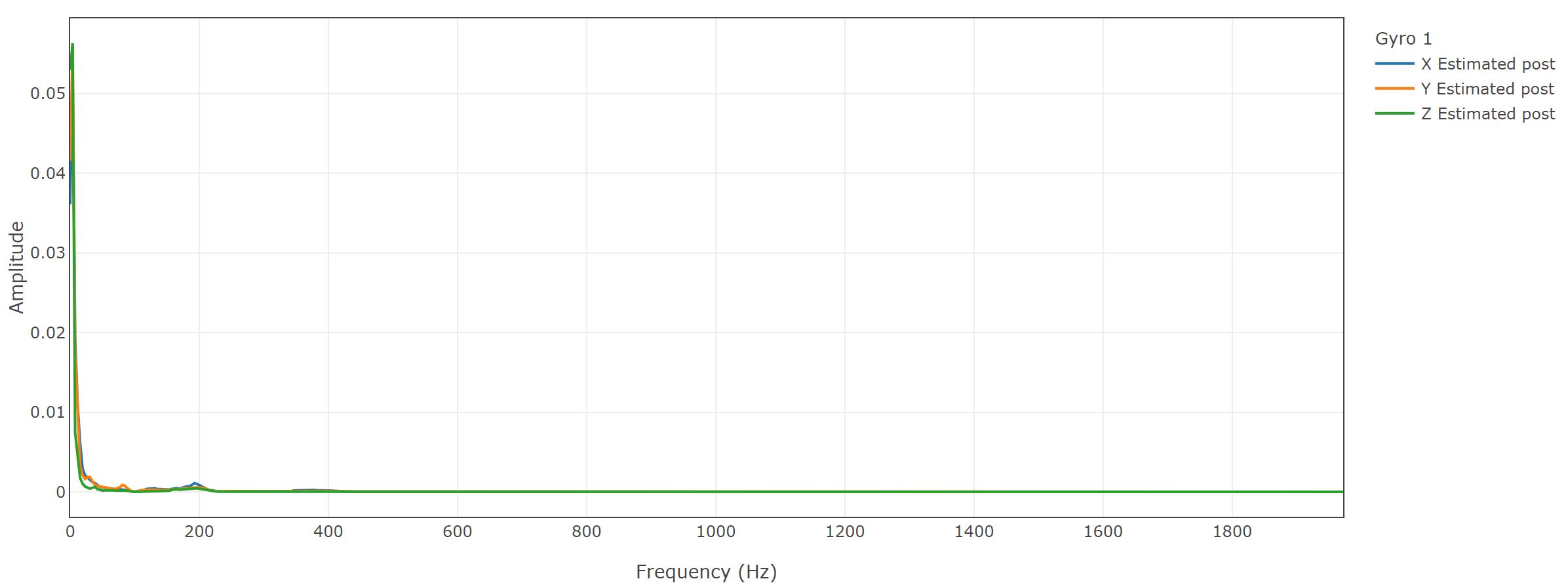
Use the least amount of filter required to do the job. Make these settings and test it. Use Linear scaling and use the Estimated Post-Filter Function and you can fine tune this yourself.