Hi,
My plane is nose down diving with throttle up whenever on RTL mode.
I couldn’t find the reason from the log.
Anyone who can give me a clue why she is diving?
Log
https://drive.google.com/file/d/1oCscxWFLUcftHp65VYmUBP3gpEXnCcVr/view?usp=sharing
Hi,
My plane is nose down diving with throttle up whenever on RTL mode.
I couldn’t find the reason from the log.
Anyone who can give me a clue why she is diving?
Log
https://drive.google.com/file/d/1oCscxWFLUcftHp65VYmUBP3gpEXnCcVr/view?usp=sharing
you need to get your plane flying well in FBWA mode before you fly in AUTO.
Please also enable the normal LOG_BITMASK values. Your log is missing lots of standard log messages.
Cheers, Tridge
Thanks Tridge.
I’ll fly again soon with rich log value and revisit here ^^
If you have an airspeed sensor on board and enabled, check logged airspeed vs ground speed. If airspeed pitot is blocked, or otherwise reporting low, autopilot will dive to gain speed if it is relying on bad/low data from airspeed sensor. Been there, done that.
Kelly
Hi Tridge
I tried it again with FBWA and felt nothing wrong but in RTL, it couldn’t keep alt.
Attached you can find rich log value.
Looking forward to any clue from you ^^;
bin : https://drive.google.com/file/d/1oLfM05l3pdb5r8ypoQGrGIdx9NejCMfE/view?usp=sharing
tlog : https://drive.google.com/file/d/1oDaSp6XF3KfeS93sGAYcGR5Gd94A-XPZ/view?usp=sharing
param : https://drive.google.com/file/d/1oD-B-5J4IsCp0nYNU8wPn4fFUTe96O0E/view?usp=sharing
Thanks wkf94025,
Airspeed sensor is equipped but ARSPD_USE = 0.
Appreciated if you look through the attached log ^^;
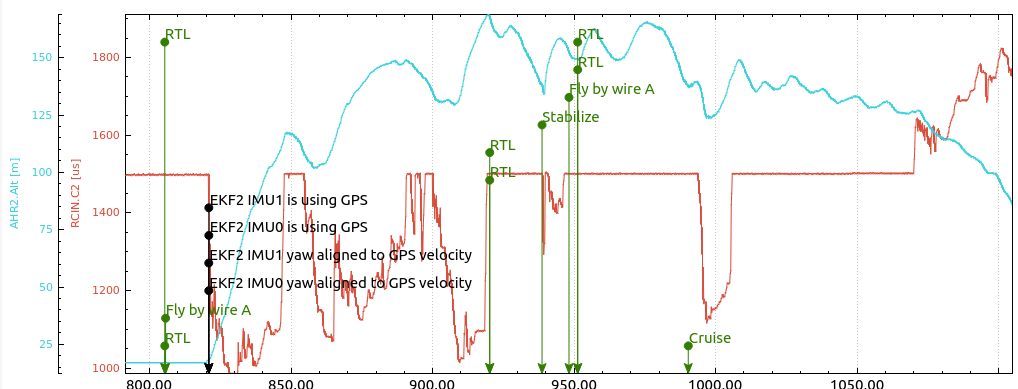
The problem in RTL is the trim on your RC transmitter. You have RC2_TRIM=1377, but during RTL your RC2 channel is at 1500. As RC2_REVERSED=1 and you have STICK_MIXING=1, this means your pitch stick input is overriding the TECS height controller and demanding nose down.
I suggest you set RC2_TRIM=1500
You have a similar issue (but not as severe) with roll. Your RC transmitter is giving 1540 but your RC1_TRIM is 1497.
Cheers, Tridge