Like I said in my previous post, the easiest thing to do is to load the default parameters in mission planner through the full parameter list window.
Chris’s videos are great for the mechanical set up of your system but in order to tune the PIDs, you need to follow the wiki on tuning the helicopter
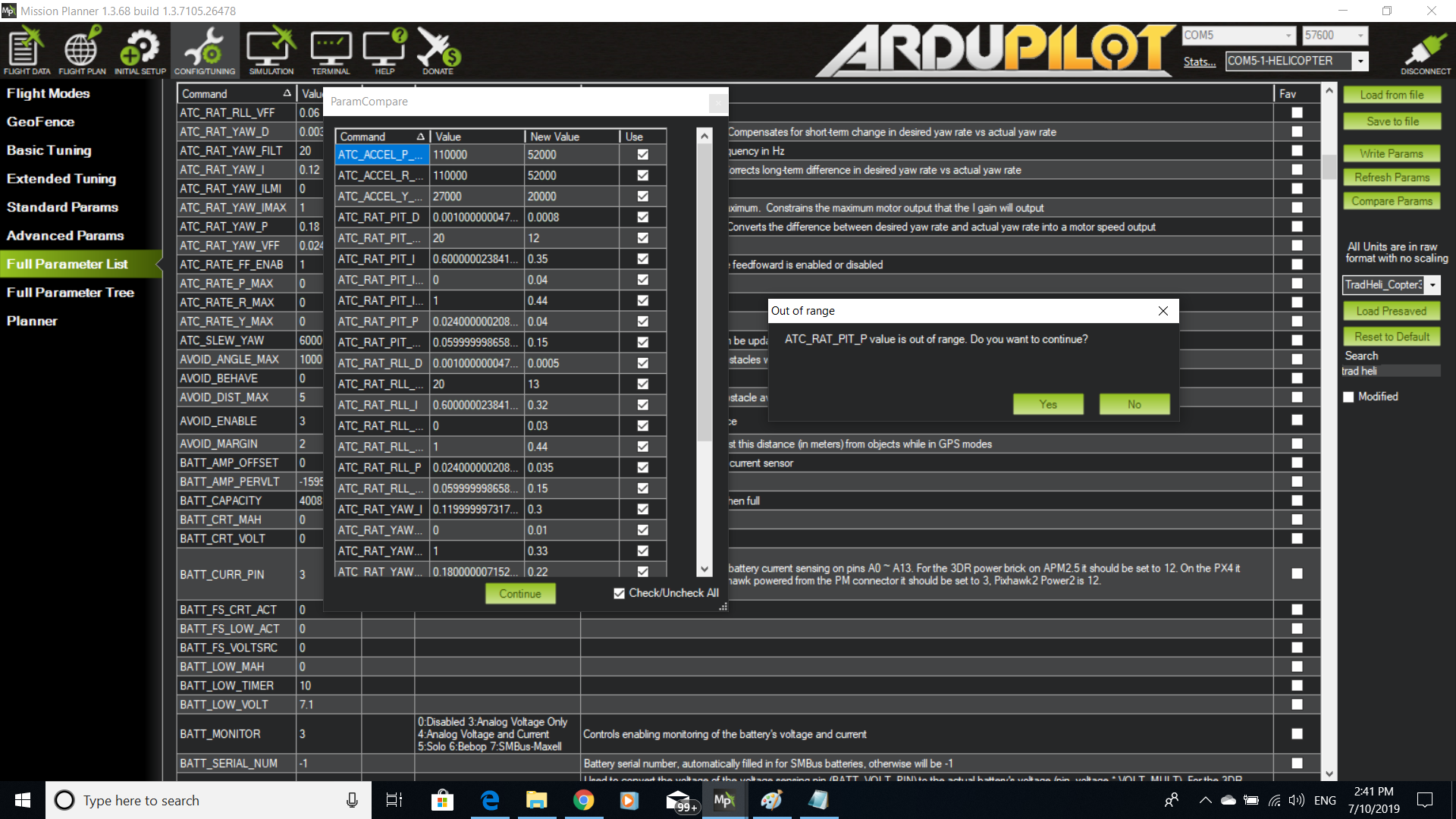
so basically; when I picked the TradHeli_Copter36_Setup-MP.param
I clicked the load presaved then the window showed me the green bars
then I clicked ok, the green is gone then I clicked write params
am I doing it right ?
Edit; when I disconnect the mission planer and reconnect, I see the (3DR_lins+_AC34 param) and don’t see the TradHeli_Copter36_Setup-MP.param
how to save the TradHeli_Copter36_setup-param ?
here is the new param file, I closed the mission planer, reopen it and connect to Pixhawk then uploaded the new Param new param.param (14.3 KB)
Don’t try any GPS modes until you have confirmed that the helicopter is flying well in stabilized mode. It should be rock solid.
Spent the time reading through all the docs on ardupilot site and watch Chris’ videos. (You can skip the throttle curve one). Read the tuning document…it might take 3-4 read throughs to get the idea. Study the parameters and know where to look for them and what values to expect.
No, he doesn’t mean to disconnect the GPS. There are flight modes that require GPS to work but they also provide higher level of automation from the flight controller. So you don’t want to fly in those flight modes until you have got Stabilize working properly.
The plan is; after updating the parameters and using the TradHeli_Copter36_Setup-MP.param
Install anti crash skids balls, and hover it in stab mode, once it’s stable and good, switch to althold, and once it’s good enough will try AUTO mission flight !
I want to try if I switch between ALT hold to STAB mode dose the heli dive !? Or stay without pitch effectiveness!!!
I had problem when I change from modes the pitch change to negative and the heli drop fast!!
Regard the logs I uploaded it above; it read the date I saved it first I tuned my heli based on Chris videos, but the uploaded parameters for the crash flight was July/10/2019 6:00 pm
I am now updated the parameters to TradHeli_Copter36_Setup-MP.param
And written down and saved it! Hope that will solve the swinging problem!
Fi156, I am exactly doing this, I don’t want another crash, it cost me time and $$
today I complete the repairs and installed back the unit after calibrating everything from the beginning…
like what Bill suggested; I uploaded the TradHeli_copter36_setup.Mp.param
write and saved it.
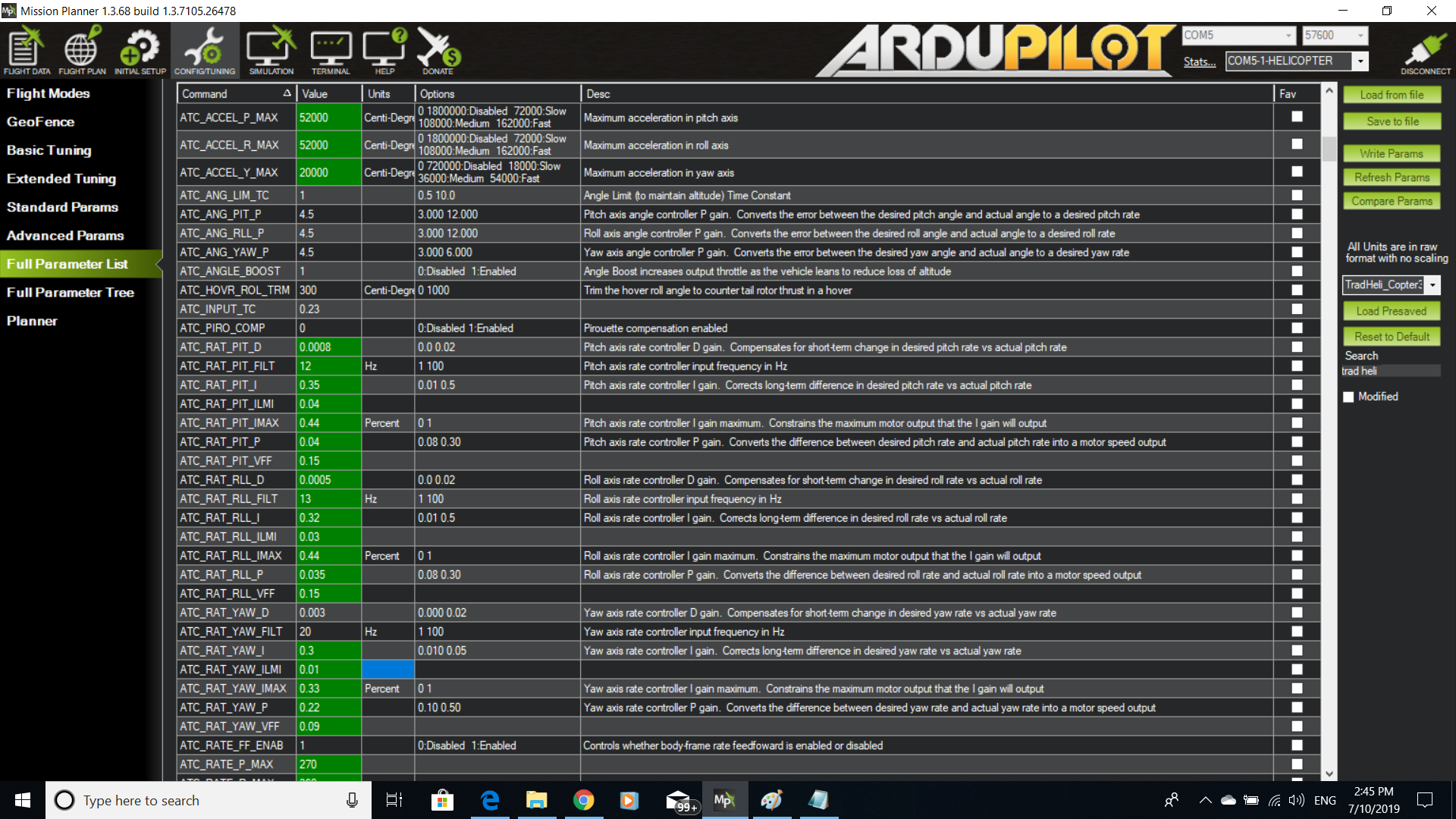
EDIT; I was reading all over the posts and collecting information regard tuning the PID and after the first hover; there was good amount of shaking, so I reduced the values of the P and the I
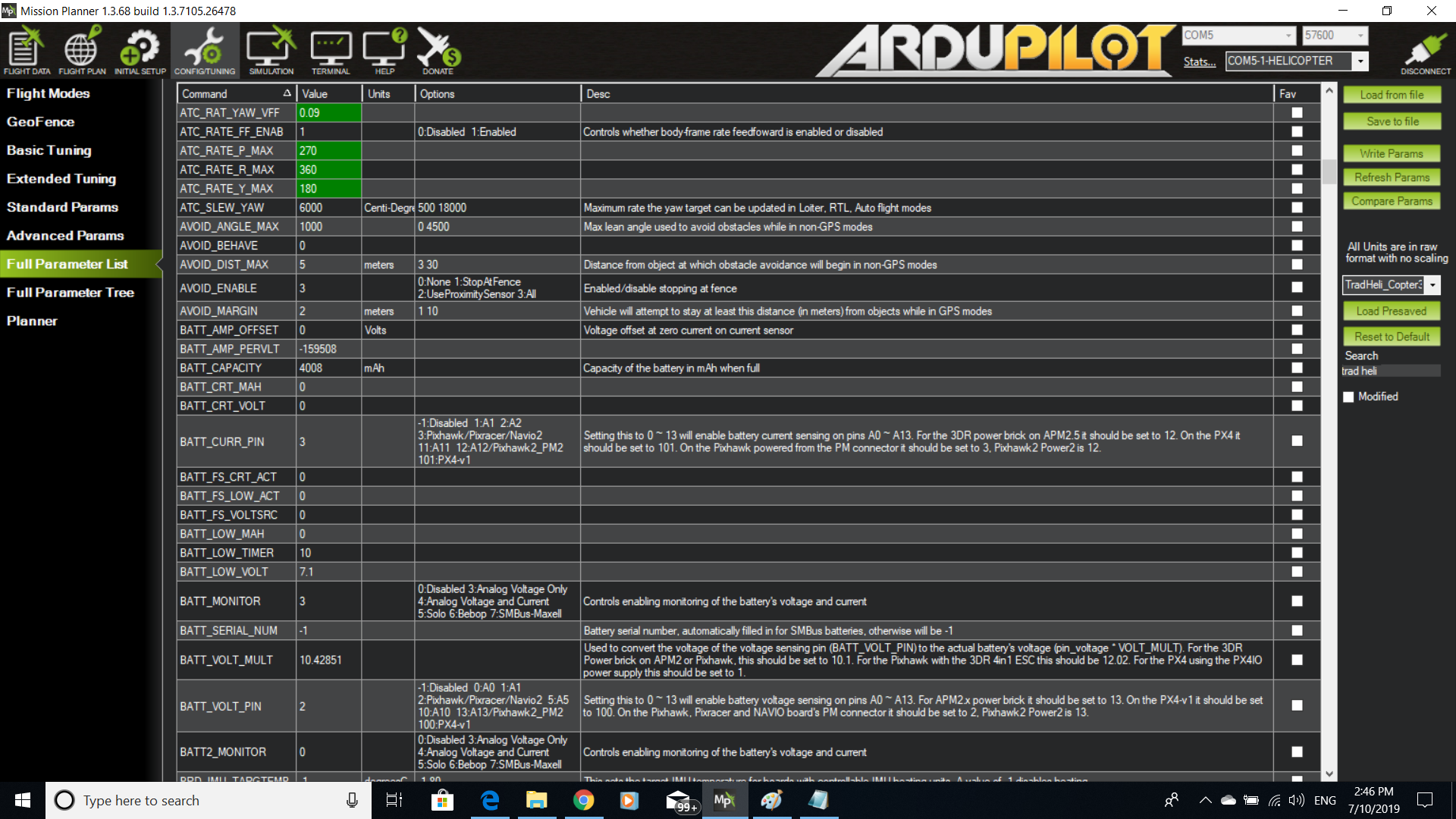
ATC_ACCEL_P_MAX,75000
ATC_ACCEL_R_MAX,75000
ATC_ACCEL_Y_MAX,25000
ATC_ANG_LIM_TC,1
ATC_ANG_PIT_P,4.5
ATC_ANG_RLL_P,4.5
ATC_ANG_YAW_P,4.5
ATC_ANGLE_BOOST,1
ATC_HOVR_ROL_TRM,300
ATC_INPUT_TC,0.15
ATC_PIRO_COMP,0
ATC_RAT_PIT_D,0
ATC_RAT_PIT_FILT,10
ATC_RAT_PIT_I,0
ATC_RAT_PIT_ILMI,0.04
ATC_RAT_PIT_IMAX,0.44
ATC_RAT_PIT_P,0.01
ATC_RAT_PIT_VFF,0.09
ATC_RAT_RLL_D,0
ATC_RAT_RLL_FILT,13
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_ILMI,0.03
ATC_RAT_RLL_IMAX,0.44
ATC_RAT_RLL_P,0
ATC_RAT_RLL_VFF,0.15
it was easy to fly it with ATC_RAT_PIT_VFF = .08 very smooth but it didn’t hold the position good and drifting was the big deal
then I changed it up to .09
now the heli is more stable but its robotic, when I release the Pitch stick back to its center position the heli shake a little bit trying to stay there !
I tried to increase the value of the Pitch_I to 0.1 but it make it worse !
also tried to increase the D to .04 but no hope… I see Chris recommend keep the values of both PIT_VFF and PIT_I the same but I couldn’t do that !
do you suggest any changes to these values?
I now Have +11 degrees pitch (stick on top)
~+5.3 degrees stick in (middle)
-3.00 degrees stick (down)
I also set the H_LAND_COL_MIN = 100
IM_STAB_COL_1 = 0
IM_STAB_COL_2= 550
IM_STAB_COL_3= 650
IM_STAB_COL_4=1000
and the collective pre-comp = -3.0 as of my tail blades spin counterclockwise was not working so I had to change it to +3.0
I am still reading here and there and checking every post to educate myself with this matter…
please if you have any add or changes to my parameters or PID please tell me to do it…
How did you arrive at 75000 for accel_P_max and accel_R_max?
So what made you change the VFF gains? By the way, the aircraft will not hold position in stabilize flight mode. this is a basic flight mode that only holds attitude. and the robotic feel sounds about right based on your INPUT_TC and accel_max params. to soften the response of the aircraft you would have to set INPU_TC higher and lower the accel_max params.
So let’s back up. You took off with default settings and got lots of shaking. My suggestion would be to zero all P and D gains for pitch and roll.
With the tail, it sounds like the precomp factor caused some issues. Once you fixed that, did the tail behave better with no oscillations?
I will look at the logs tonight. But my thoughts are that you revert the gains for pitch and roll back to the defaults that I had you load from the file and just zero P and D gains. See if that eliminates the shaking in pitch and roll. If you still have oscillations with just the I gain. then there will be other changes to be made. But I would like to try zeroing P and D gains first.