Hi,
I have a Pixhawk 6C running Ardurover. I intend to use manual control and a joystick on the groundstation to control it. As far as I can tell, I have managed to set everything up correctly; I have followed the wiki guides and successfully setup servo outputs, joystick inputs and RC calibration. I can confirm this is working as expected because moving an input on my joystick shows the intended effect on the servo page.
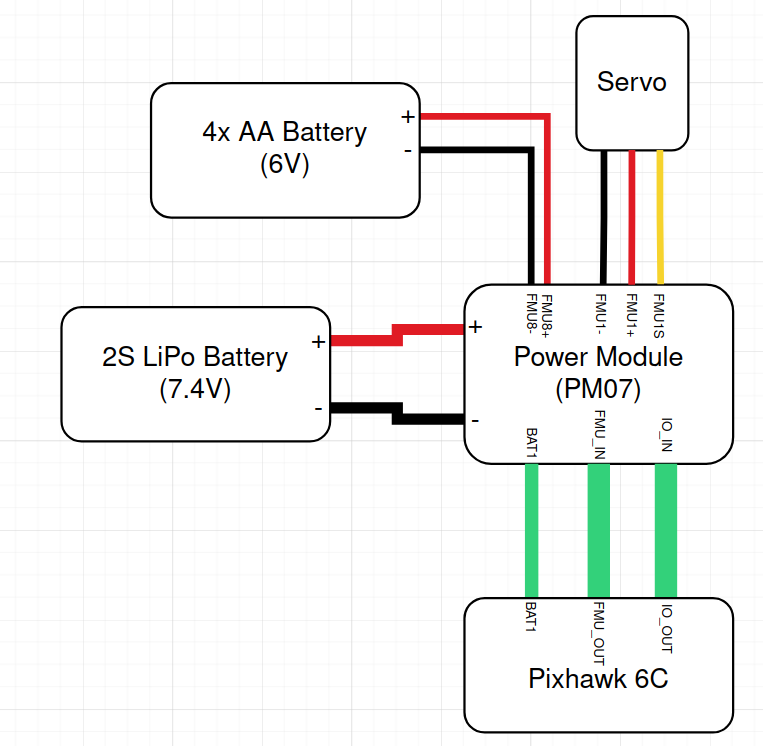
I have connected the servo to FMU1 on the Pilot, and provided an external 5V power source to the servo (sharing a common ground with the battery running the pilot).
I can successfully arm the Pixhawk, but whenever I move the joystick the servo doesn’t actually move.
Can you give me any advice on what might be wrong?
Pre-arming the I/O LEDs are solid green (PWR) and flashing blue (ACT), and the FMU LEDs are solid green (power) and flashing red (B/E). Post-arming the I/O LEDs are the same but the red FMU LED goes solid.