Flysky FS-i6X 10CH Radio Transmitter and Receiver FS-iA10B
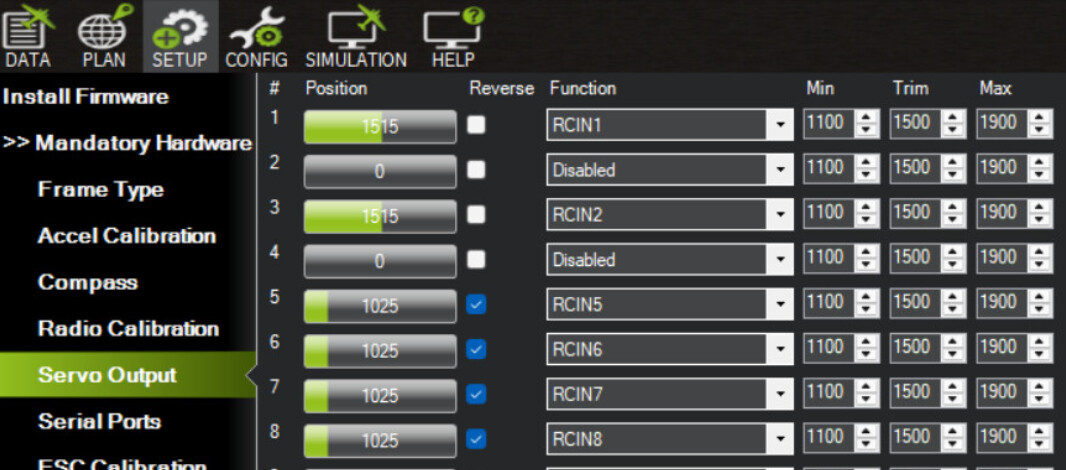
Problem is that I can only get the motor driver to move the motors by using RCIN for Servo Outputs. Putting the ThrottleLeft and ThrottleRight in the Servo Outputs would not work.
Thanks Yuri. After some troubleshooting, I got everything to allow Mission Planner to Arm and I did get the motors to run. But now the left motor only runs backward with the remote throttle ~ch3, and the right motor runs in both directions from the right remote stick ~ch1. How do I now get both motors to run off the right remote stick forward / backward / R&L turns? What else do I need to check or change to consolidate both motors to run on the right joystick?
I recalibrated the radio several times with all centered except the Throttle being down. My project is a Rover and as a newbee I don’t know the airplane lingo.
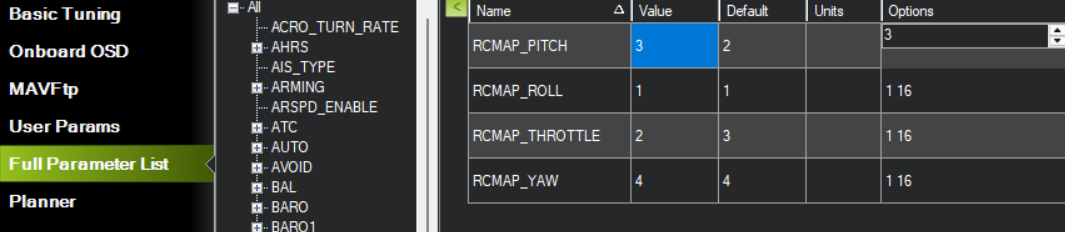
My radio has the channels 1&2 being the Right Stick (both centered) and channels 3&4 being on the left (ch4 centered & ch3 Throttle) Given that what should I change to effect the Aileron and Throttle?
Thanks. I have read allot of the documentation and I have made so many changes in Config, I probably got something else going on. Do you know what else I should do like Do I need to Mixing Motor Channels? It’s all very confusing and multiple ways to change the same things using different names adds to it.
I did a Factory Reset on the radio and now both motors are on the Double Centered Stick but they are offset 90 degree. I can live with that but I have yet to get the Aux Switches to work for Save WP, and I have a 20A PWM Switch Controller plugged into the Orange Cube Aux Out #5. I powered the output rail separately as well. Thanks for your help. I will continue my research.
Stop “living with” configurations that are obviously wrong. One of your motor outputs needs reversing. If you don’t deal with that now, you’ll be in much worse shape than just holding the radio sideways when you attempt to use autopilot features.
Thanks Yuri. My problem is that the Left Motor goes in the correct direction on the Radio being Forward and Backward. But the Right motor only moves with the Radio stick going Right and Left to make it to make it go both directions. Changing the Reverse settings only does that. How can I remap my Left/Right stick to go Forward and Backward for that motor? Do I need to change the Motor Type from NORMAL to BRUSHED W/separate motors? I tried that and I only got the left motor to run continuously and no movement from the right motor. So confused. And I recalibrated the radio where everything look perfect on the screen.