I love mountain flying with my copters, usually following the terrain at a fairly low altitude (50 metres or even less). I run a python script which adds extra waypoints (using an digital elevation map) in order to maintain the terrain clearance.
I have been advised on this forum to use Spline waypoints in order to get smooth flight. However, I’ve learnt from another thread that there is no guarantee of the minimal altitude then (even if I put the waypoints at more or less equal distances):
So my suggestion is to introduce a modification to the spline waypoints so that it would be guaranteed that (for example) the flight path won’t be lower than the non-spline trajectory connecting the spline waypoints. Another issue is about flying too high, what also should be limited.
Another question: is it possible to get more smooth flight by setting the waypoint radius, so that the copter starts to turn smoothly towards the next waypoint? Is this comparable to the spline waypoints?
Yet another question is about using the terrain following elevation data placed on the SD card. It is possible to use them to guarantee that the copter won’t fly too low in some radius from the stored locations with known altitude?
And finally lidar: what happens if it determines that the spline trajectory goes below of the minimum altitude limit (in any variant of an AUTO mission)? Is the auto mode stopped? Or does the copter simply apply the correction? Or is an RTH triggered?
I think that all those issues should be made very clear for long and low flights, possibly sometimes without full video/RC coverage I even think that the docs could contain a different perspective: not fly some pattern and let the altitude vary, but have the guaranteed minimal altitude as the necessary condition.
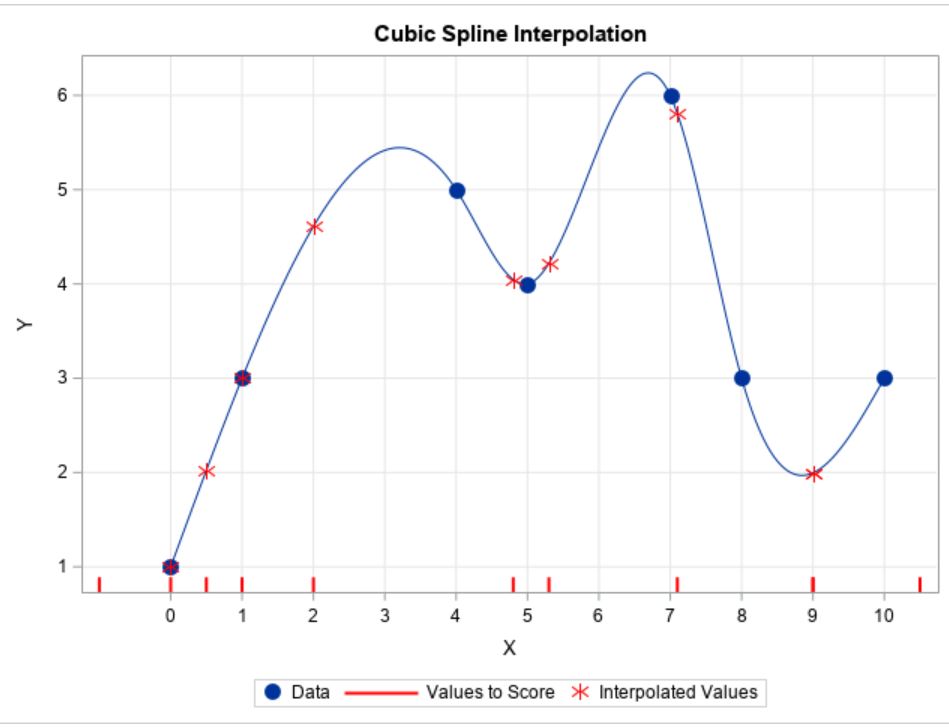
Then it wouldn’t be a Spline. Here is an example of the Spline function. Consider the Blue Data Points Waypoint elevation. The Spline function is fit for both horizontal position and elevation so you can look at this as an elevation graph or a plan view of horizontal position.
Are you referring to this point from the release notes for 4.1.0beta2?
“Auto mode Spline command fix when using terrain altitudes”
What does it mean that they are “a lot tighter”? That’s nice, I’m reading the blogs about this development, but does it mean that it’s guaranteed that the flight path won’t go below the lines between pairs of consecutive waypoints?