Hey,
I am trying to set up two DP0501 RTK GNSS u NOGPS.param (16.7 KB)
nits onboard my heavylift drone project.
No matter what params i change i simply cannot get the GPS to even get to a “NO FIX” state in mission planner.
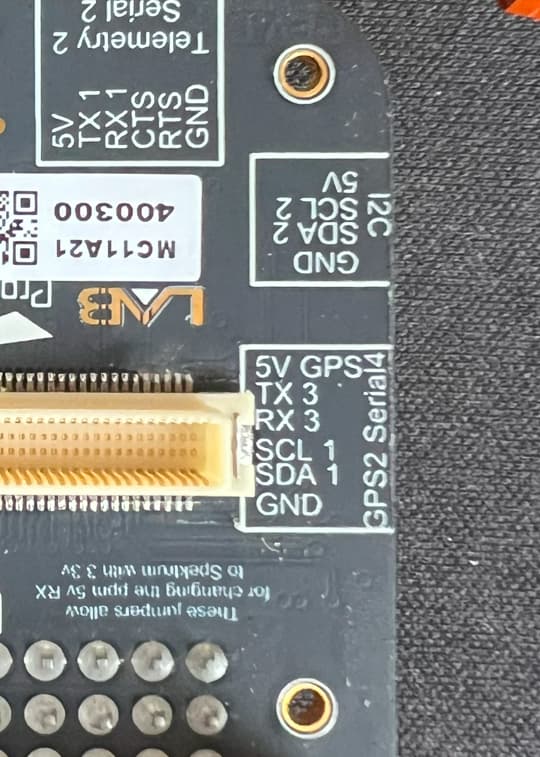
Ive started with just one gps plugged into GPS2 port on the Cube Orange Mini carrier board (wiring is correct). I can connect through usb to U-Center so i know the unit is working, ive also tried another Cube Orange and it’s the same.
In messages tab its repeating this: EKF3 waiting for GPS config data
Any help on this would be greatly appreciated!
Attached is the param file. (keep in mind this param file is basically untouched except the gps settings)
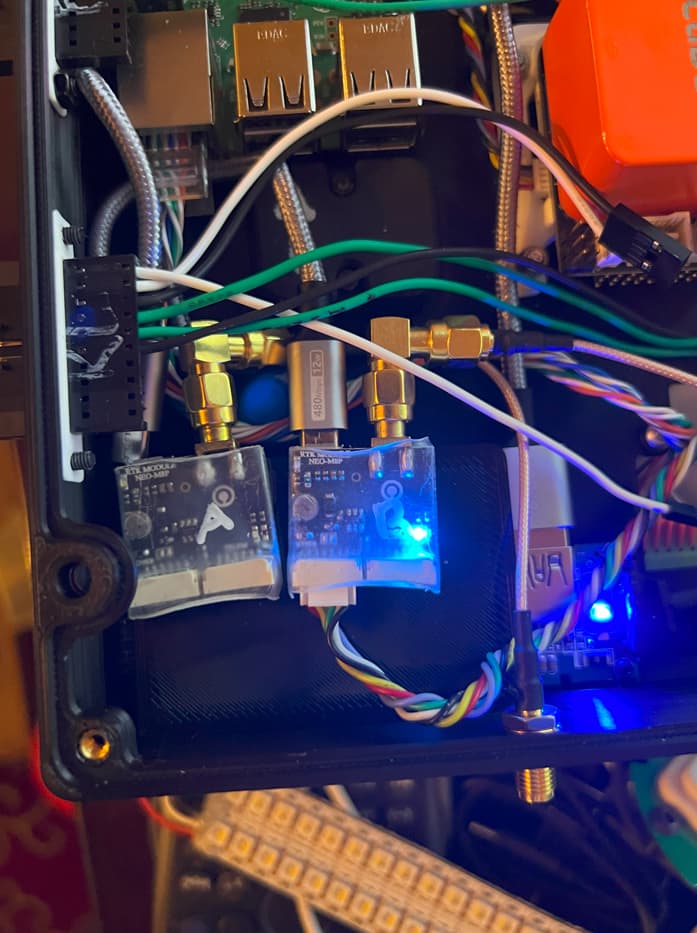
Ive messed around with some stuff which didnt work so i reset it to defaults (and verified all my changes were gone) a have another gps unit as you can see in that pic, same issue with that one. really has me stumped
Reboot and save your current parameters. Share that file.
Also, be 100% sure that anything you did in uCenter is gone and that the module is at defaults. Too many users make some fundamental flub and then try to fix what isn’t broken in uCenter, which makes everything monumentally worse.
Might help to do some basic calibration and eliminate those nag warnings. I don’t think they preclude sensor detection, but there’s no sense having a position fix if the orientation isn’t even calibrated.
Not entirely sure what else to tell you. uBlox modules usually work straight away with minimal hassle.
Your first shared parameter file had incorrect settings. Thereafter, I see no glaring issues other than the fact that you have done something in uCenter that could be impacting results.
I hope you aren’t expecting a moving baseline config out of this in the end. I’m not aware of an M8 module that supports it, and even if there is a variant that does, the M8 series is notoriously poor performing when it comes to RTK.