Hi Everyone,
Currently I am facing something weird issue.
My GPS says No Fix, in fact the Hdop is under 0.6 and sat count is 25+.
I have kept it ON for more than 10 minutes and it still says No Fix.
Really can’t understand the reason. Here is the log file for your reference: 121 27-04-2024 09-22-06.bin - Google Drive
Really appreciate your response.
Thanks!
Low signal quality and high output variance and/or low update rate.
Hdop is a measure of geometry quality,not signal quality.
1 Like
Thanks @amilcarlucas for your response. I have performed all the calibration again and it worked but I had a problem of No Fix during auto flight on the first GPS, I want to know why the ardupilot did not use my second GPS as a redundant? I want to set my second GPS as a backup for the first GPS failsafe, How can I do that?
I am not able to find the cause of the first GPS failure, as per logs the satellite count went to 0 from 28 so I am guessing it might be due to antenna issue or something.
Here is the flight log: 2024-04-27 13-20-44.bin - Google Drive
Really looking for your help. Thanks!
On Monday I can send you a file for the second GPS that you can use inside the methodic configurator software.
1 Like
Hi @amilcarlucas, I hope you are doing good. Sorry for the late reply.
Can you please send me the file for the second GPS? so that I can use my second GPS as a backup once my first GPS fails.
Thanks Again.
Sorry, that slipped my mind.
I’m on holidays right now, so away from my PC. I can send you on Monday.
But it is basically a single parameter, set GPS blend.
1 Like
Thanks @amilcarlucas for your response, I really appreciate that even though you are on holidays but you still replied to me.
Is that what you are talking about: GPS_AUTO_SWITCH=2 ?
I have few queries on that:
-
I have read that we should not use blend when using moving baseline configuration. Is it for the Dual GPS configuration? not for the dual antenna configuration.
-
My both GPS are not similar, my second GPS is M8N and I want it to use only when the first GPS fails but blend will use both simultaneously I guess and does it always use the GPS1 as primary? or it will switch the primary based on the performance?
Thanks!
Are you using moving baseline?
Are you using GPS for Yaw?
What is your first GPS?
What is your second GPS?
Post a picture of the GPS antennas.
1 Like
Yes! I am using moving baseline for yaw. First GPS is CUAV 2HP (dual helix antenna), this will be used for the yaw and second one is M8N, want to use it only for failsafe purpose.
Thanks again @amilcarlucas. But that can create a problem, as GPS_AUTO_SWITCH would set the primary GPS based on the hdop values and sat count.
In open sky and stationary, my M8N gives better hdop and connects to more satellite and during fly its hdop varies a lot so I want the M8N only to work during 1st GPS fails.
Apart from this issue, I have something else to ask. What parameter is to reduce the Yaw rate in auto mode? I want to reduce my Yaw turning speed in auto mode to make it turn more smoother in auto flight.
Thanks!
Yes, that is the issue with the current implementation: It assumes similar GNSS receivers.
But it does use accuracy values, not HDOP to do the switch, So it might work.
If it does not, you will need to write a lua script.
ATC_SLEW_YAW and/or ATC_RATE_Y_MAX should do what you want.
1 Like
Thanks @amilcarlucas, I really appreciate your support. I need to test it and I will let you know the results.
Yeah! that is a good option but can I make it run always automatically during every boot up?
I just checked it, My ATC_RATE_Y_MAX was disable, going to set it for slow. what is the ATC_SLEW_YAW? sorry I am not able to understand its unit and how can I check my current yaw rate or velocity as till now ATC_RATE_Y has been disabled? (this is for my reference to see how much I have to reduce it).
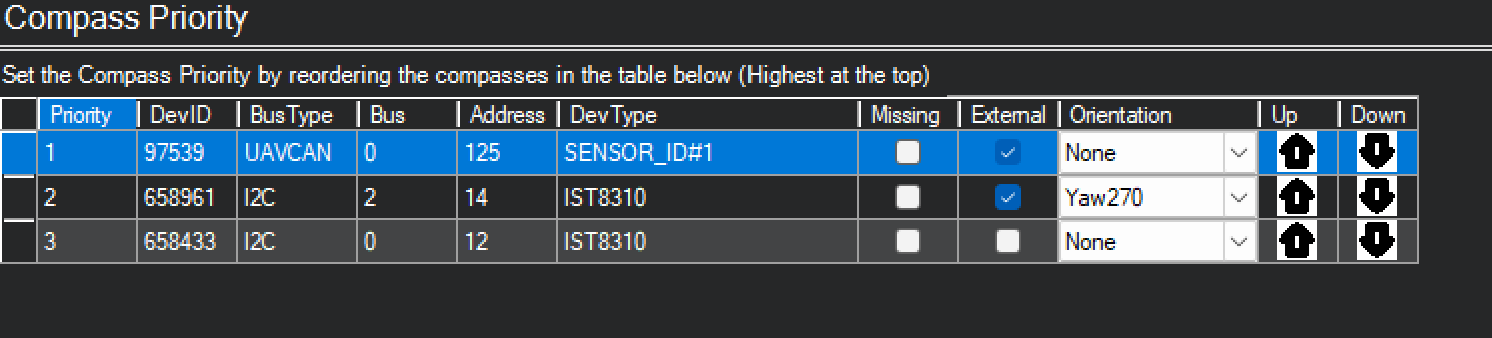
And I am trying to set the compass but little confused here. When I set the priority here like this, then UAVCAN will be set to Compass1 right?
and what does compass_use mean? does it also based on the same priority? and what is compass_enable? will it turn-off all the compasses use if i set it to 0?
I want to disable my internal compass, which is on priority 3, so if I set compass_use3=0, will it be enough to turn-off it?
Thanks again and sorry to ask you these many questions.
yes, that is enough. the prio is already correct.
1 Like