My copter has been exhibiting a weird behavior in the last few days: when I try to yaw the copter CCW, most of the time it just doesn’t respond.
The copter is well balanced (center of gravity at the same location as center of thrust) so I’m puzzled…
The copter is able to yaw CW without any problem.
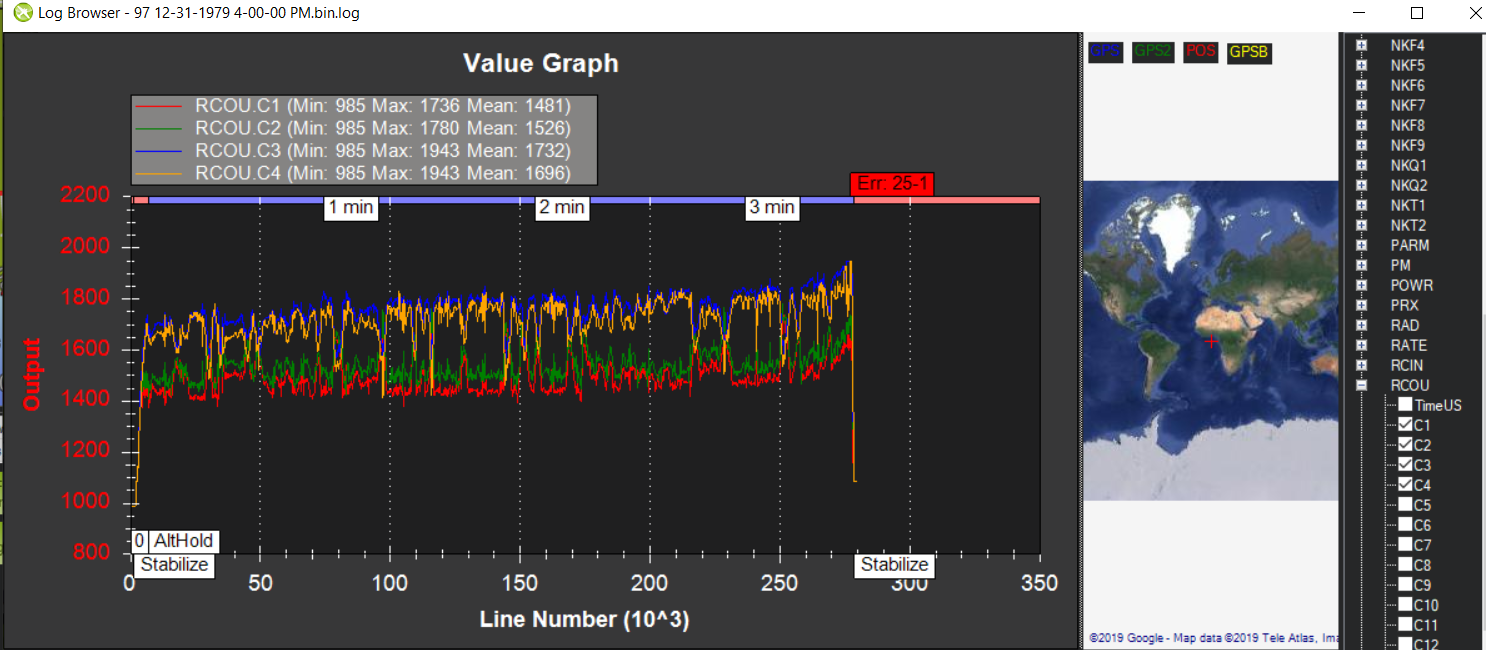
When I pull the logs, motors 3 and 4 are working really hard (about 1800pwm) while motors 1 and 2 are just spinning at about 1500.
Thanks for the suggestions guys.
I’ve just checked with a bubble level, the arms are perfectly level, their top surface is flat so the motors are pointing straight upwards.
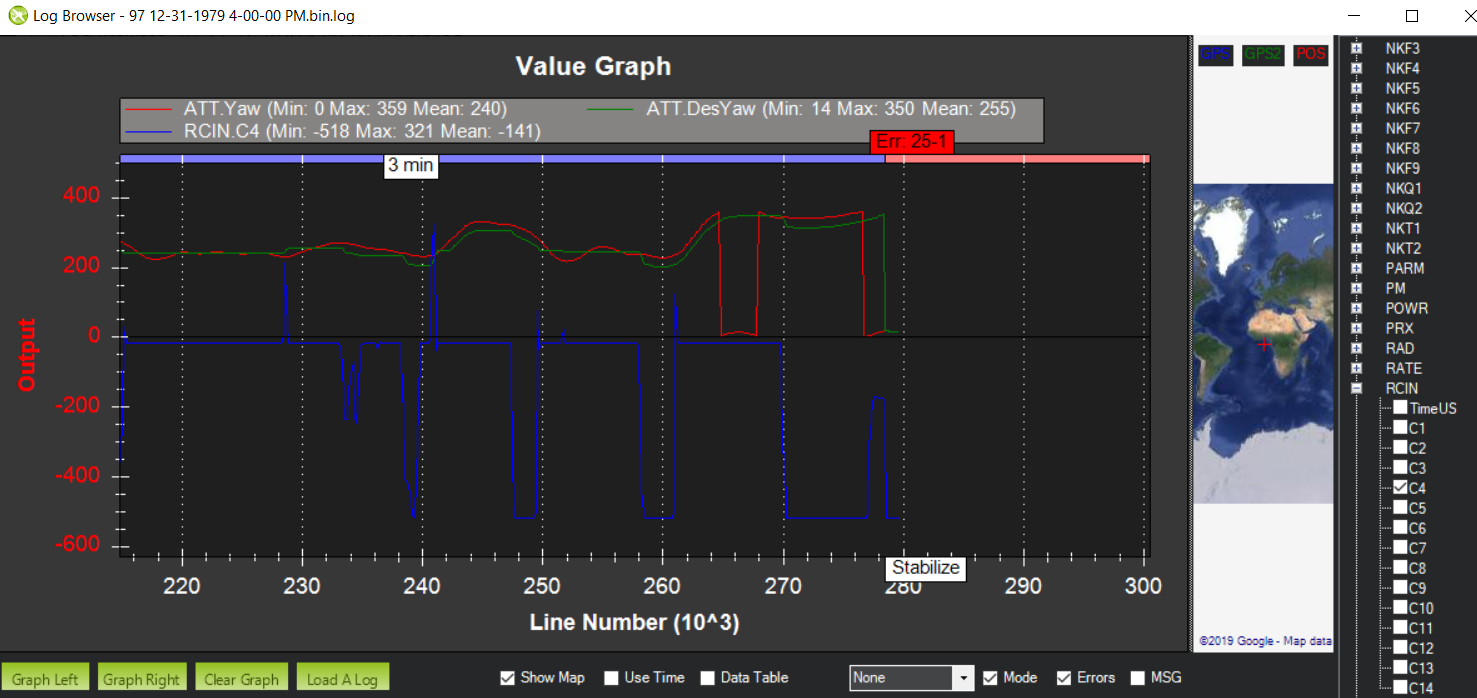
From your graphs it is definitely fighting a yaw reaction.
Having 2 motors at or near max is the reason you get yaw one way and not the other.
So you need to find why you have a yaw reaction.
If everything is straight and props line up tip to tip, then it must be something else related to the power 2 motors have being greater than the other 2.
Have you redone your ESC calibration lately?
I have been noticing a rising amount of imbalance related to CW props, always the CW not generating as much thrust as the CCW.
Just because they are from the same maker does not mean they are good props.
Maybe the CW props are just not generating the same thrust as the CCW props.
The thrust imbalance is an interesting point. I’ll keep that in mind for future tests.
I just came back from a flight test after replacing motor 3 with a new one and now I have yaw CCW yaw control! All motors pwms are at the same level which is a good sign: