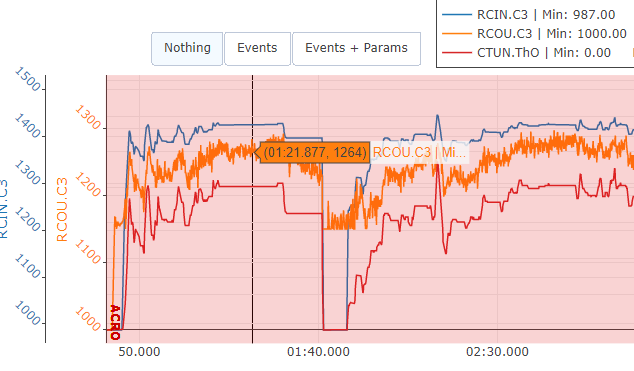
I think I have a problem regarding Throttle output. In this screenshot we can see that Throttle OUT is equal to 0.08 (8%) when RCIN3 (Throttle stick) is 1425ms which is near 50% of stick command. So I think I have a scale problem that result in airmode not working due to low output throttle when arducopter try to stabilize the quad.
My question is then: why do I have that outscalled Throttle output ? I found 2 parameters that could explain that difference: MOT_THST_EXPO (0.6 in my case) and MOT_BOOST_SCALE (0 in my case). But maybe it is not where I should look at.
Can you post a .bin log? MOT_SPIN_MIN does not need to be high enough to stabilize the quad - it needs to be low enough to cover the full thrust range so that stabilization can occur at low throttle. I don’t quite understand what you think is the problem in the diagram.
Hi, thanks for the reply. Unfortunately Log Anon only produce .Log
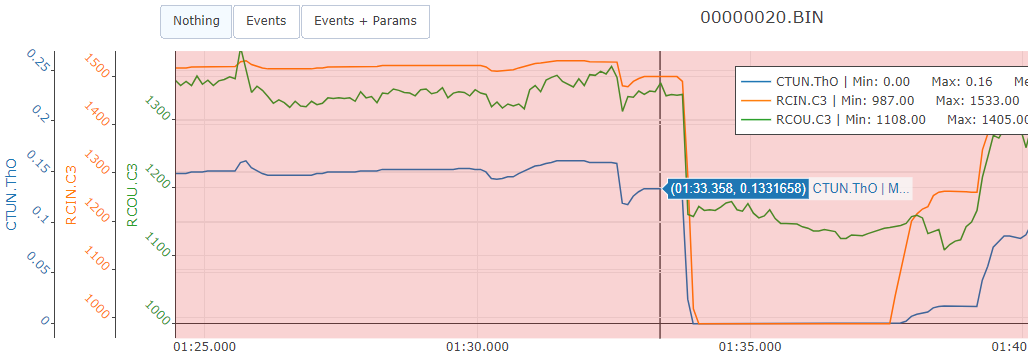
As I said I was not sure about my interpretation of the diagram. To me when the throttle stick is 1500ms and at the same time the controller output is 1350ms then the controller Throttle Output (CTUN.Tho) should be 35% (350/1000*100) ? But here it is 13,31% (0,1331…) I did a better screen:
When you hit zero throttle the copter is still stabilizing so it seems airmode is active. But you also have a least one motor hitting min, which means that setting MOT_SPIN_MIN lower might help
Interesting. that’s not how I understood MOT_SPIN_MIN. To me this parameter acted to avoid motors to spin less than the value. For exemple if I set the value to 0,1 and I put throttle stick to zero during flight, the motors should still keep a 10% thrust (to allow airmode to stabilize). Seems I was wrong and that it acts in the opposite way Will test it tomorrow (it’s night here) and let you know.
Thanks
Well you are right that SPIN_MIN stops the motors spinning below this value, but it won’t make any different to stabilization - stabilization happens inside the thrust range not outside
So I did Andyp1per modification and set MOT_SPIN_MIN lower (set it to 0.02 and MOT_SPIN_ARM to 0.01). Behavior is better but still not perfect. If I release throttle gently, stabilization is ok during fall down but if I do it harder (like a push to make a figure) then stab is not made at the beginning. I also cannot do any loop probably for the same reason (the loop is done but it is hard to get quad stable after that). Here is the log from this cold morning test https://www.amazon.fr/clouddrive/share/wEFzJUb5SEIwtTMm7Qemfk9BAZlTiu1lxgouMSYrize @chronowarper you’re maybe right, my mix_man is at 0.1 which is default. I will try to increase it and see.
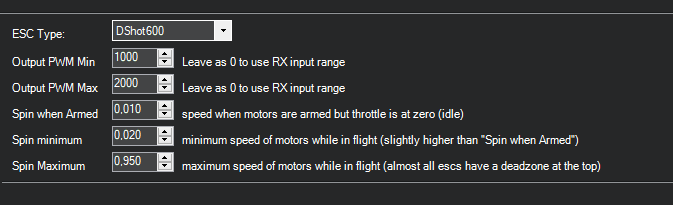
I also forgot to precise that I use a KakuteF7 FC that is as I know features limited du to its low internal memory. I also did not precise that I use DShot600 ESC configuration which may have some impact too:
Well, finally no need to tune (despite it should a good thing to do I agree). Root cause was ATC_THR_MIX_MAN as pointed by @chronowarper. Default value for this parameter was too low for me (0.1). I just tested it at 0.5 and now I can do hard maneuvers. My PID are not perfect and those acrobatics are not rock steady but at least now I can do it without having my frame going into unctroled behaviour. Difference is obvious: https://www.amazon.fr/clouddrive/share/IaUFuXvQFm3LeBAKTK2iCEdwEmMz6DhrJz3M1HFpsFr
Maybe that the default value for this parameter should be 0.5 ? Or is my 0.1 coming out from the Autotune ?
0.1 is the default because its safe. Higher values give good control but aggressive behaviour on the ground which can be dangerous if you are not aware.
Although 0.5 is still quite low - I have this set to 4. I’ll chat to Leonard about whether increasing this makes sense.
There is also one strange thing that I discovered trying to understand my problem: Autotune did set ATC_ANG_PIT_P and ATC_ANG_RLL_P largely above limits. They where set to 28 when the limit according to parameter description is 12. I did not check all parameters at this time but it is strange that Autotune could set a parameter above limits.
Those are not really hard limits shown in Mission Planner and can generally be ignored. They get updated periodically but not at the pace of firmware releases. Some craft fly well with these at 35.
Also echoing what Andy said, the quad behaves jittery/bouncy when it’s touching the ground with a high mix_man. Definitely commit to lift-off when you throttle up. I also tend to land by disarming close to the ground.
Well, to my side, despite probably the worst doitmyself frame that ever flew (see it below), no problematic bounce or jitter on touching ground and I can now, without saying it’s really Freestyle, make decent acrobatics. It is likely that it is due to currently low P on R/P and I have to boost if from Autotune values to something more agressive and see if it has an impact on land bouncing. That said, from Acro to Auto mission, passing by Pos/Alt Hold etc. it can now handle everything pretty well considering that crappy frame. I will now take the time to show andyp1per videos (would need some time as there are a lot ) and try to tune it better. Will post some videos later as soon as the weather gets better.
In the same time, I’m also building a soooo much bigger cheap crap quad, based on the same tubing concept (and recycling everything that I can)…and I already know it will be another tuning challenge
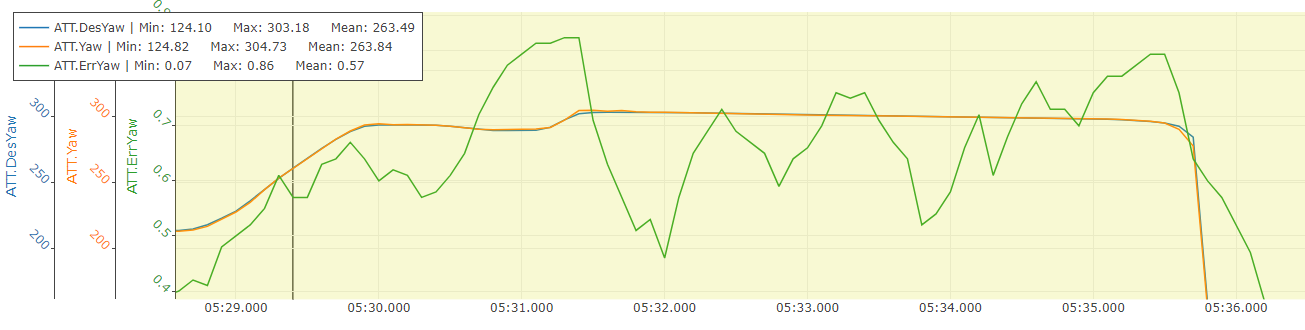
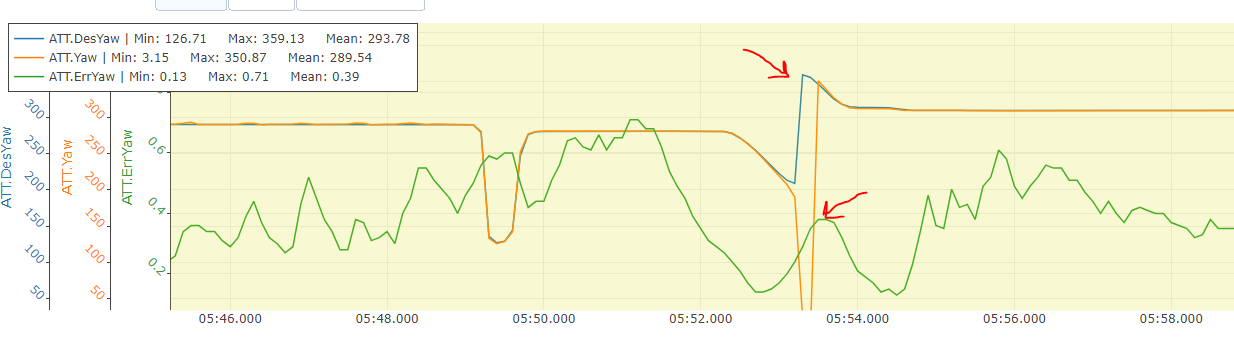
Hi, still trying to tune my crapyquad, I have a question regarding how is ErrYaw calculated. When I look at logs I can see that this Error is sometimes high despite desired Yaw and Yaw curves are similar:
The contrary is also true. In this example, during the same flight, just a bit after the previous example, the ErrYaw is lower than previsously whereas DesYaw and Yaw are far away.