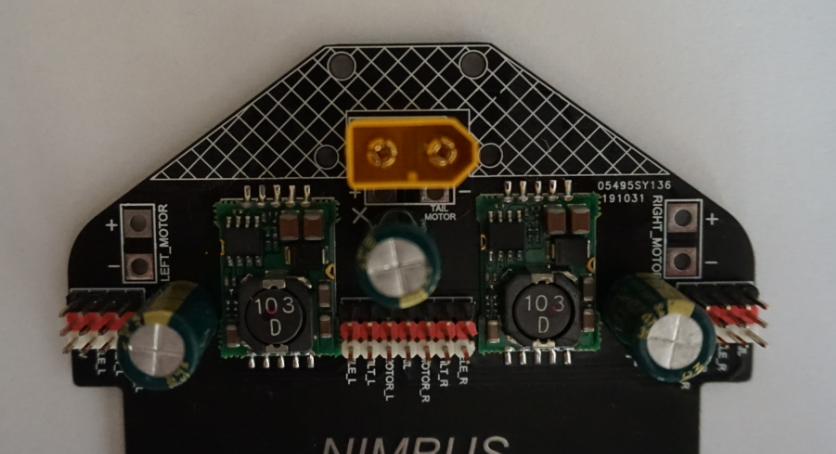
I have not seen this board before. Perhaps it is a proprietary design from FoxtechFPV? Where did you buy the frame?
It looks like a dual regulator power distribution board. The center pins are common, including the XT60 power connector. Then you have left and right side connections to go to the wing connector for battery power, servo power, and control of tilt servos and ailerons.
Thanks, I am new to the world of part-armed drones. I’m starting with the electronic part of the nimbus. I attach a photo of the same circuit with more detail. Thanks again for any help.
I´m setting up my Nimbus VTOL from MFD, with Orange cube on the latest stable firmware.
Could you send me all your relevant param files, so that my tunning process would be simpler and less frustrating?I have very similar motors and prop size to yours.
It would be incredibly helpful
Thank you upfront
that’s true, although a technical man is always curious about differences between apples, oranges, and other types of fruit.
you’re right 30A is okay given total hover time is limited. Also correct that my fat 75C brick can sustain lower sag. other important (i’d venture, dominant) factors include total disk loading, motor operating condition at hover. if ill-matched, hover current will be higher than optimal.
Once I moved to a Foxtech 16,000 Diamond bat I would be 5C only and may have more of a sag problem. I’ve read the documentation and probably will try to rely on sag compensation features built in the code. if still problematic, more exotic solutions may be needed.
Anyway, I was providing another data point to pool data together. I myself am very guilty of high cruise current, hence the drag busting campaign. I will probably carry a sports cam for recreational use first. Of course, all the payloads will be fully faired to minimize drag.
Hi Greg and Co,
I’m hoping someone can review the last portion of this log… On takeoff flipped - ? poor piloting as rear motor had not powered up resulting in seized ® tilt servo. I would love it if someone is able to determine the cause a) of the flip, b)cause of the seizing considering it was in Q mode already.
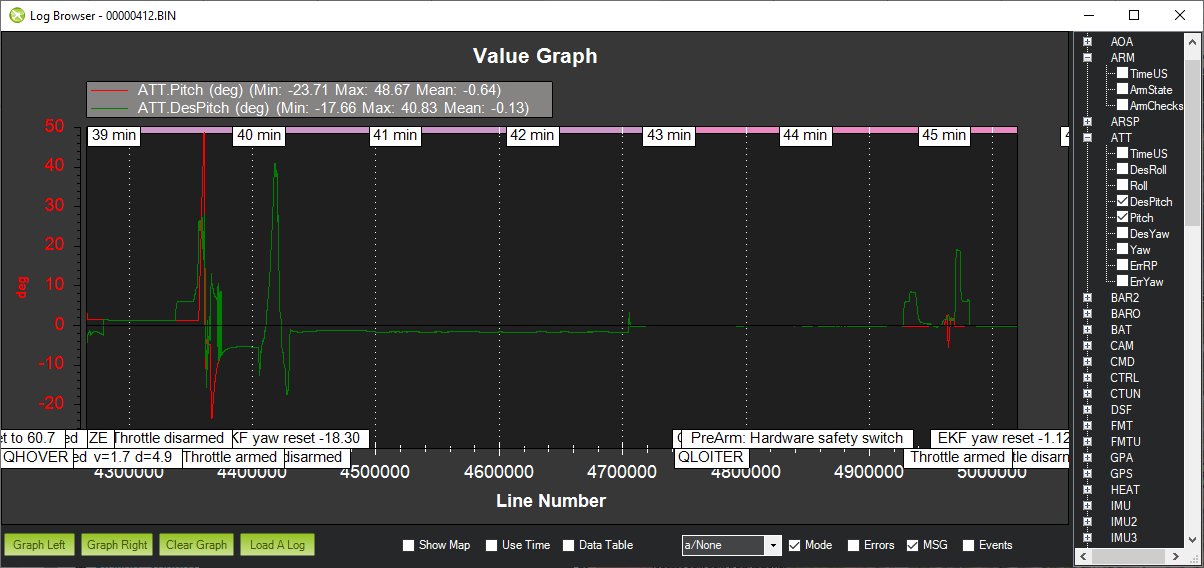
I am not seeing a flip on any portion of this (00000412.BIN) log using the UAV Log Viewer. However, when using Mission Planner, it looks like there was activity after the main flight had landed. I see multiple ARMs and Disarms. On the first image, the large green DesPitch spike perfectly covers the red Pitch spike so there is no issue here.
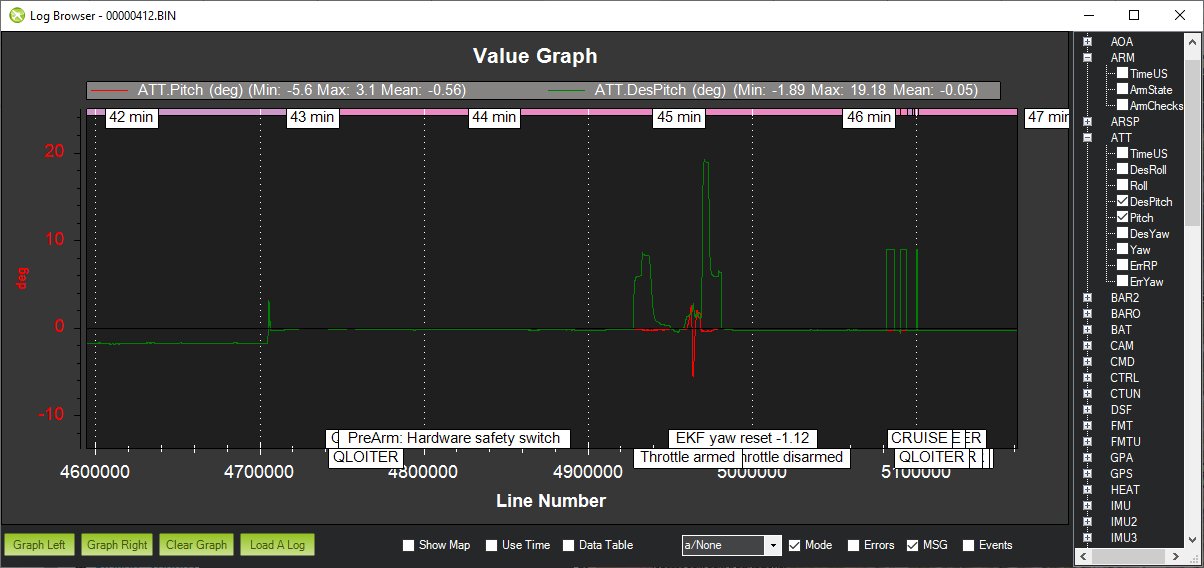
The second image is a zoom of what could be the culprit. You had a “Hardware Safety Switch” prearm and then the DesPitch no longer followed the Pitch. This could be when you picked up the plane but it is not recored on the UAV Log Viewer. Can you detail your experience a bit more to help understand the period of the log to focus on?
Hi Greg,
Thanks so much for looking - a bit more detail about the afternoons efforts.
I took of after normal preflight checks and conducted hover checks - these where all fine and did some flying in cruise and FBWA before a couple of trial RTL’s all sucessful and final landing about 17:56… I checked I had plenty of battery and was going to follow a similar plan but failed take off. then flipped -
I’m pretty sure looking at the logs the flip on VTOL take off occurred in the time frame 39-40min 17:57. The second graph to me represents me trying to preflight before shutting down and packing up - at 45 mins I noticed the Propeller clipping the wing when armed and promptly disarmed. It was at this time I noticed the servo appeared seized. At 46mins is where I switched between q modes and Fixed modes to determine if ® tilt servo was seized and not responding to inputs.
I have ordered the tilt servo kit from Foxtech hopefully it will arrive soon- in the meantime I’ll disassemble the ® and see if I can local purchase the same servo.
Do you tune and set up the VTOL with trial and error tunning? Or do you use some tune and firmware from the internet.
I am very interested as I am yet to do my one
I do my own tuning but there are automated tuning routines available, if you so choose. If I recall correctly, because it was several years ago, just some yaw tweaking was needed. Use the quadplane and forward flight tuning parameters in the Nimbus VTOL files below for a starting point.
hey greg i’m doing a preemptive replacement of all the servos. I scrolled up and down but couldn’t find how you did it. Did you just cut off the foam at the base of the plastic part? looks like a lot can go wrong here
you can try Q autotune. Unfortunate for me, it didn’t work for the pitch axis, but you might have better luck, depending on your mass distribution, motor response, etc.
It wasn’t a hard procedure and all the servos are still working a few years later. I just had that one lemon go bad before I even got off the ground.
It looks like I cut the foam at the base but it is just an overexposed image. I ran a razor knife around the inside perimeter of the plastic base and then pried it off with a screw driver. It doesn’t have to be perfect since the new glued joints with Beacon Foam Tac will be stronger than the break area.
I did make sure that my servo worked before gluing things back together. It also allows you to center the position for putting the arm back on.
Hi Greg and Co,
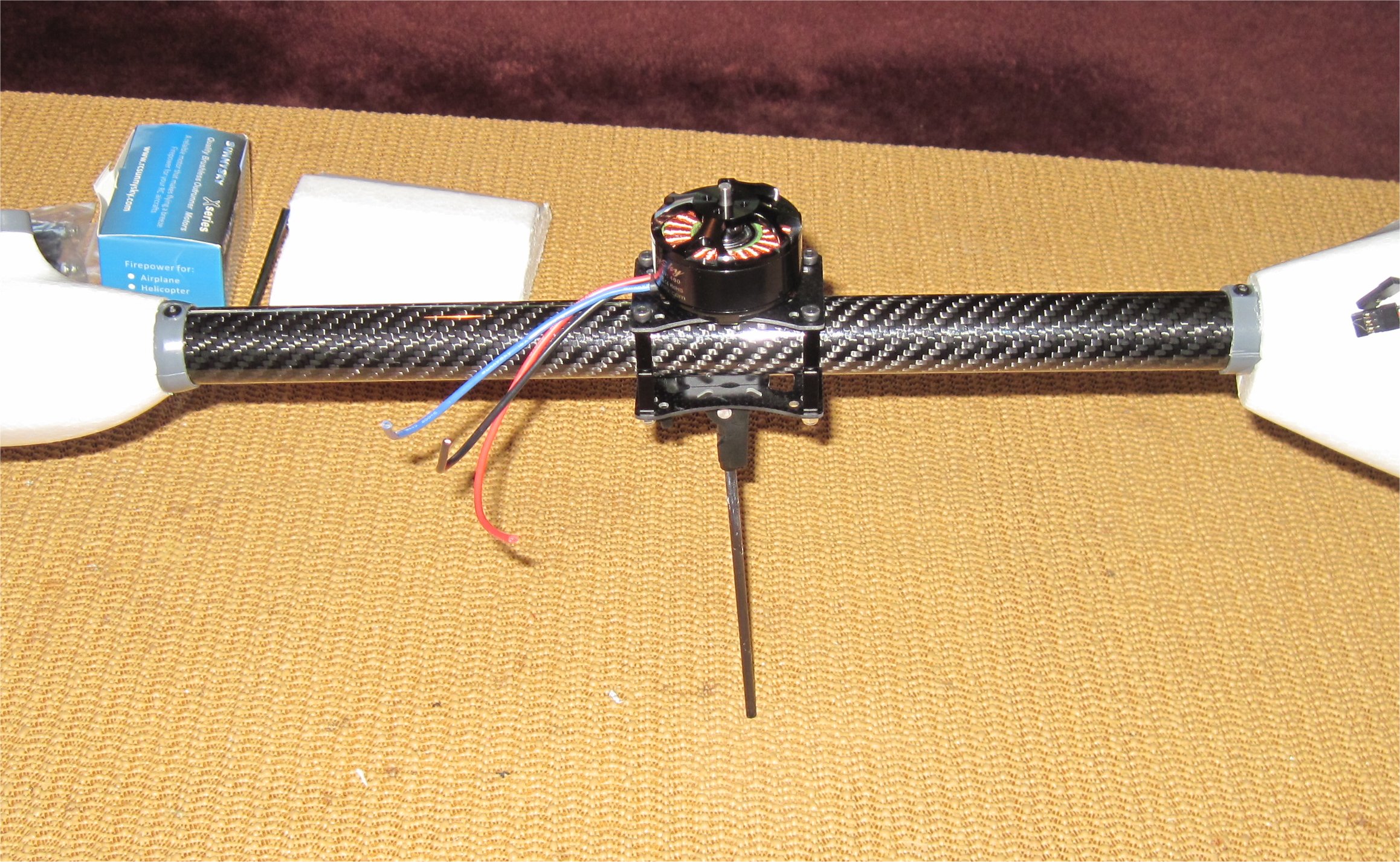
I’m hoping someone with a Nimbus V2 from Foxtech could have a look at the rear motor. Mine appears to be tilted right. Having a look it appears to have a washer under the two left motor retaining screws giving it the tilt. My guess is to offset some torque but TBH I hadn’t notices it before my recent flip. Unfortunately I’m at work ATM so no photo to add to my query.
Thanks for the correction. On the DIY versions, we use 25mm tube clamps from AliExpress.
Although I couldn’t find a close up image of the V2, it sounds like the Foxtech version uses a level platform that needs some washers to offset the motor angle slightly. I can’t imagine that there is much torque to offset that can’t be handled by the vectored yaw so it likely is used to center the tilt rotor offset.
I’ve never noticed any significant offset during a hover.
Am I viewing this correctly? The two washers are tipping the rear motor slightly forward or backward? (not left or right) I can’t tell if we are looking at the forward or rear part of the mount.

 that’s true, although a technical man is always curious about differences between apples, oranges, and other types of fruit.
that’s true, although a technical man is always curious about differences between apples, oranges, and other types of fruit.